







目录
面试:技术40%+沟通%
集群和分布式
集群
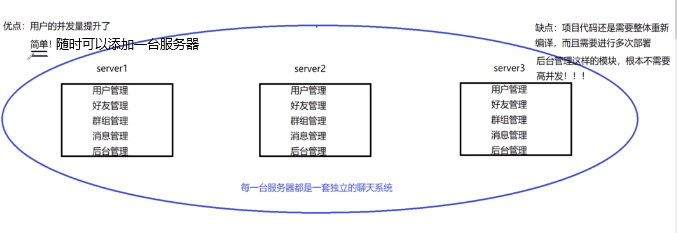
每一台服务器独立运行-一个工程的所有模块。
集群的好处和坏处
集群的意思就是每一台服务器都是独立的运行的一套系统
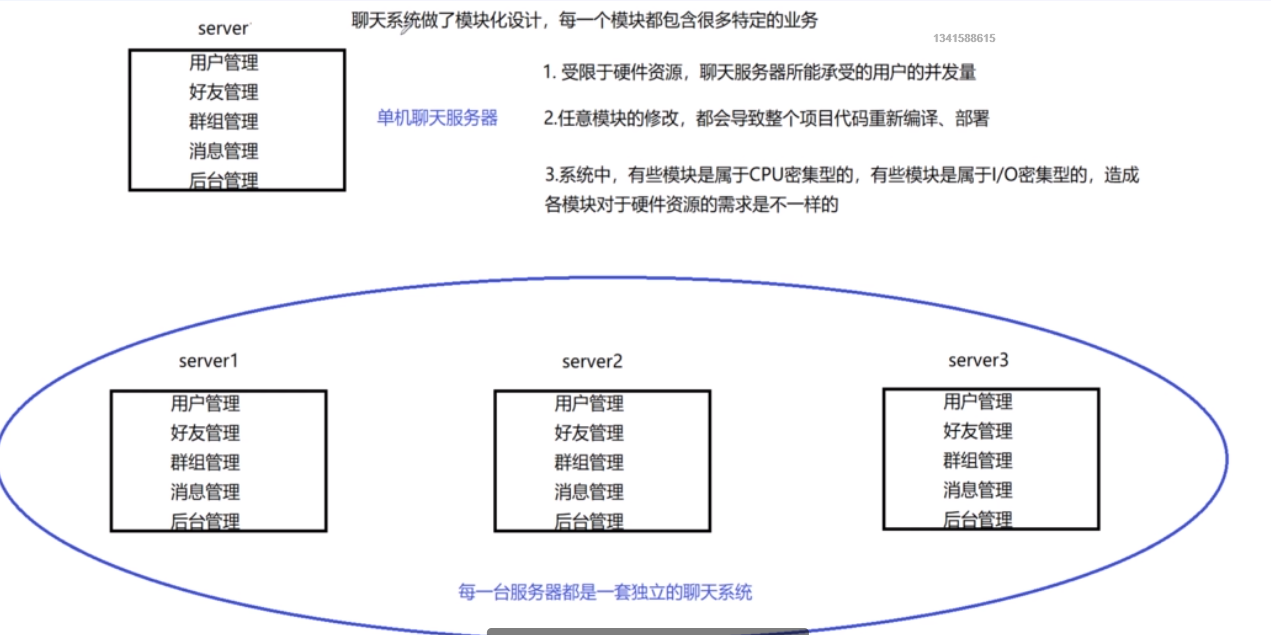
IO密集型可以增大带宽和内存大小;
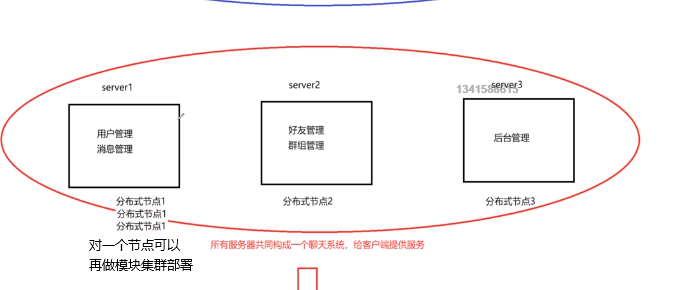
分布式:
一个工程拆分了很多模块,每一个模块独立部署运行在一个服务器主析上, 所有服务器协同工作共同提供服务,每一-台服务器称作分布式的一个节点,根据节点的并发要求,对一个节点可以再做节点模块集群部署。
RPC 分布式网络通信框架
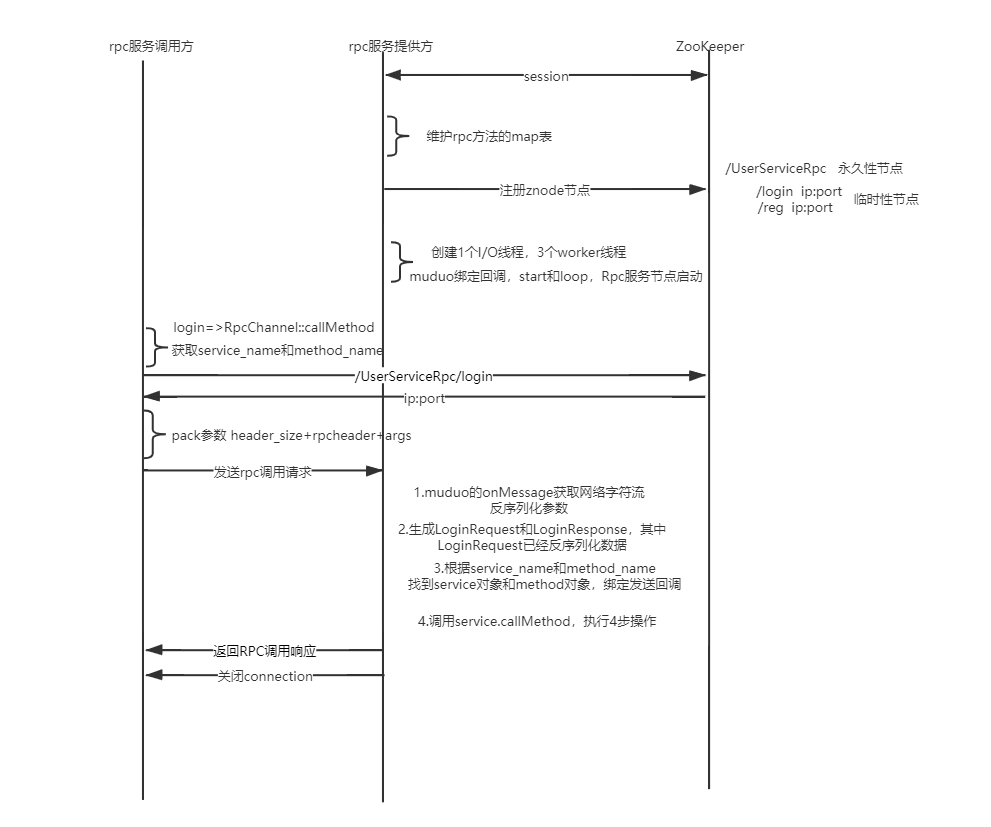
ZooKeeper
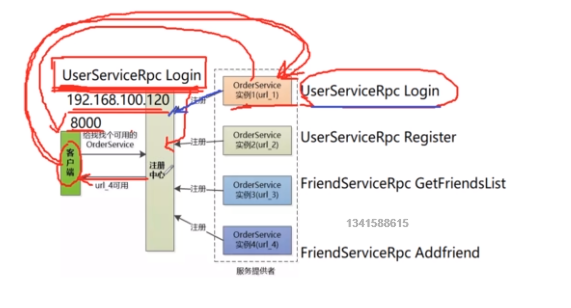
ZK之所以引入到分布式网络通信框架中,是因为我们网络通信框架支持的RPC通信,必须得在一个地方去找到我
现在想调用的这个RPC服务到底在哪一台机器上。
zk就是一个特殊的文件系统
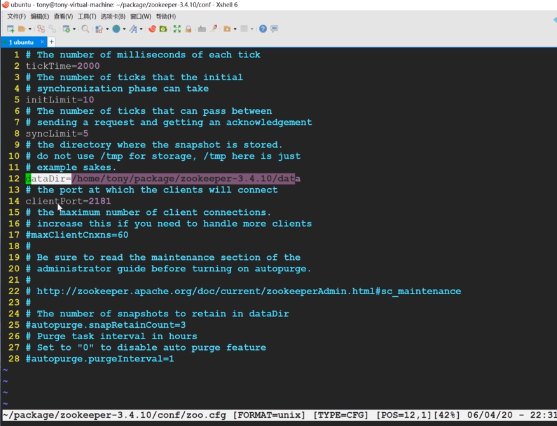
配置文件:
zk数据存储的地址
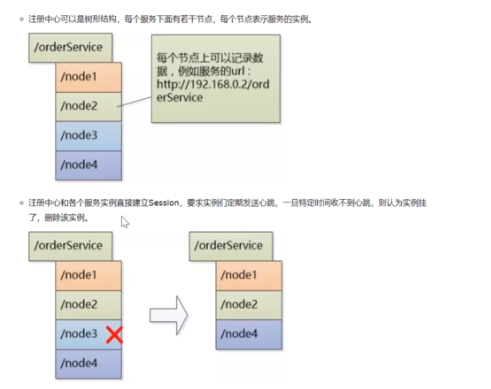
zk的数据是怎么组织的?
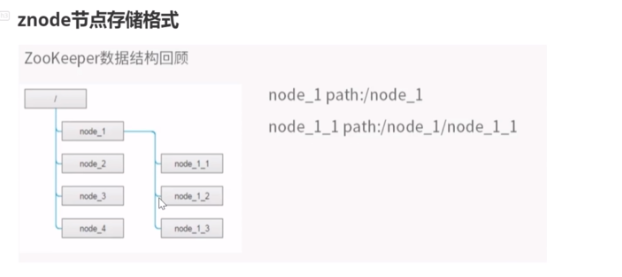
在/node_1,每个节点都可以创建 子节点node1_1,有兄弟节点
必须先创建父节点,才能创建子节点;
zk客户端常用命令
ls、get、create、set、delete
获取zookeeper节点的详细信息
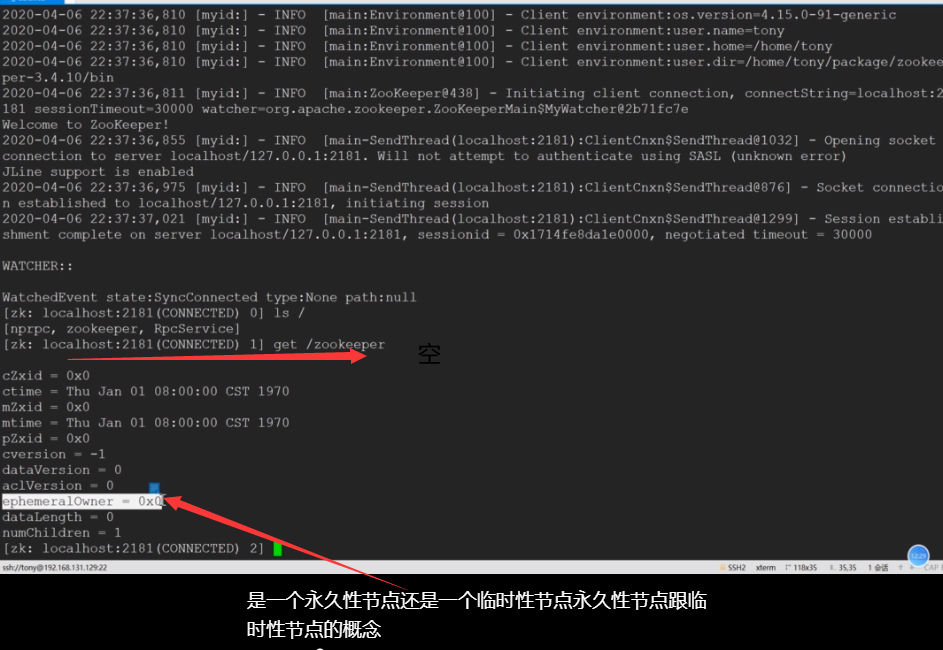
查看一个节点是不是永久性节点,如果这个值是0,就是永久性节点,不是就是临时性节点

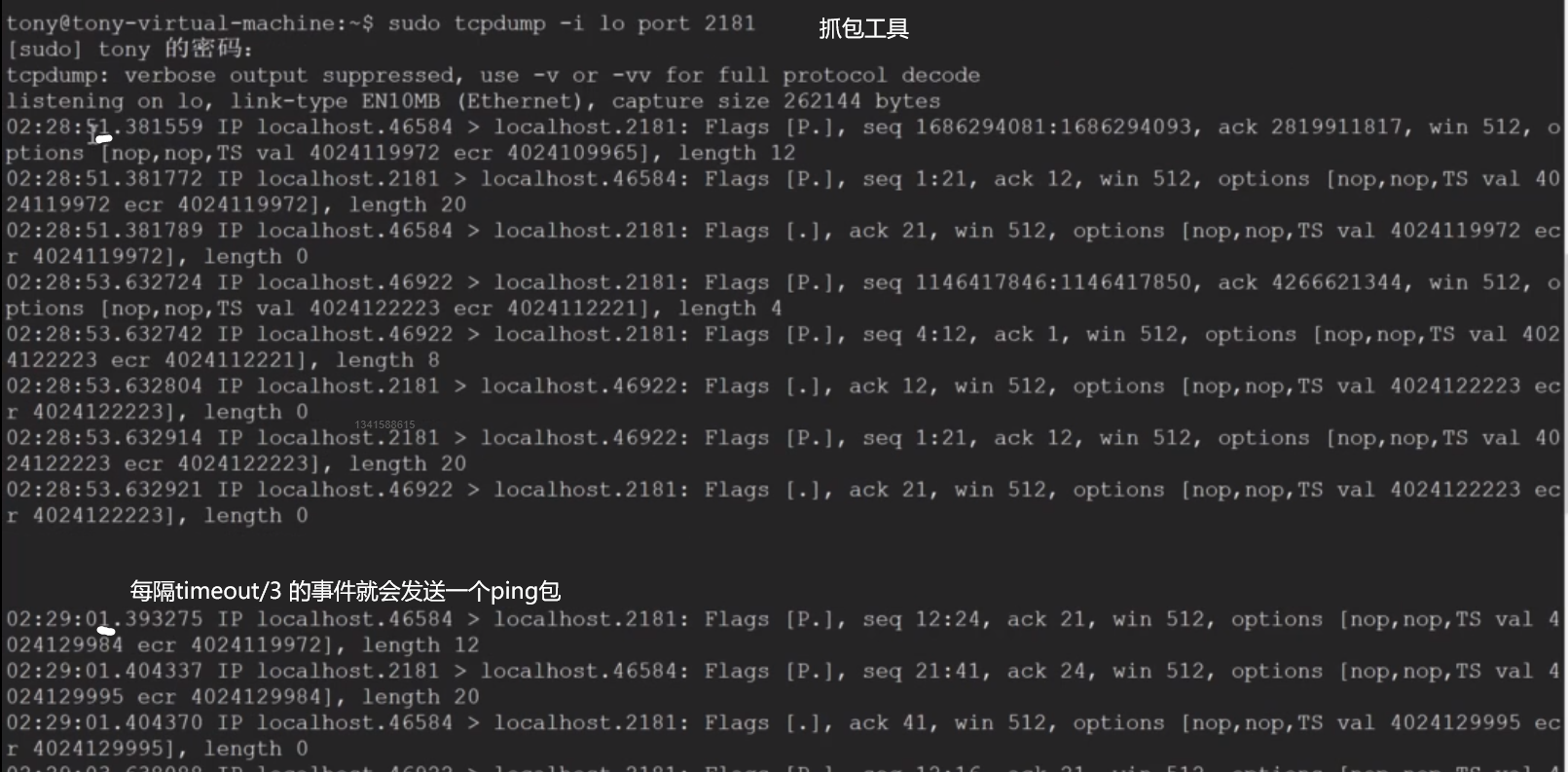
zk的watcher机制
通知监听机制,事件回调机制
在这个节点上监听他节点子节点的任何的变化,当这个子节点有任何变化的时候呢,有ZK会主动的去通notify这个客户端该处理些事情,这就是很简单的watcher通知机制
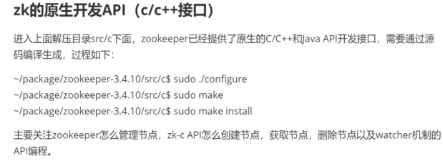
zk的原生开发API
原生ZkClient API存在的问题
Zookeeper原生提供了C和Java的客户端编程接口,但是使用起来相对复杂,几个弱点:
1.设置监听watcher只能是一次性的,每次触发后需要重复设置
当你注册wacther、添加一个wacther,如果ZK给你通知一次的话,你就不要想得到第二次通知了,因为他只要给你通知一次,这个wacther就失效了,你如果后续还对继续对这个order service这个节点的子节点的任何的改动感兴趣的话,你必须在上一次接收他的这个推送消息以后,通知消息以后呢,你必须重新再去注册一个相同的服务,这个是不是就是做了很多的这个重复的操作。
2.znode节点只存储简单的byte字节数组,如果存储对象,需要自己转换对象生成字节数组。
代码
// 全局的watcher观察器 zkserver给zkclient的通知
void global_watcher(zhandle_t *zh, int type,
int state, const char *path, void *watcherCtx)
{
if (type == ZOO_SESSION_EVENT) // 回调的消息类型是和会话相关的消息类型
{
if (state == ZOO_CONNECTED_STATE) // zkclient和zkserver连接成功
{
sem_t *sem = (sem_t*)zoo_get_context(zh);
sem_post(sem);
}
}
}
// 连接zkserver
void ZkClient::Start()
{
std::string host = MprpcApplication::GetInstance().GetConfig().Load("zookeeperip");
std::string port = MprpcApplication::GetInstance().GetConfig().Load("zookeeperport");
std::string connstr = host + ":" + port;
/*
zookeeper_mt:多线程版本
zookeeper的API客户端程序提供了三个线程
API调用线程
网络I/O线程 pthread_create poll 会阻塞(因为不看性能)等回调global_watcher
watcher回调线程 pthread_create
*/
m_zhandle = zookeeper_init(connstr.c_str(), global_watcher, 30000, nullptr, nullptr, 0);
if (nullptr == m_zhandle)
{
std::cout << "zookeeper_init error!" << std::endl;
exit(EXIT_FAILURE);
}
sem_t sem;
sem_init(&sem, 0, 0);
zoo_set_context(m_zhandle, &sem);
sem_wait(&sem);
std::cout << "zookeeper_init success!" << std::endl;
}
在服务端,
添加zookeeper,下面的即可:

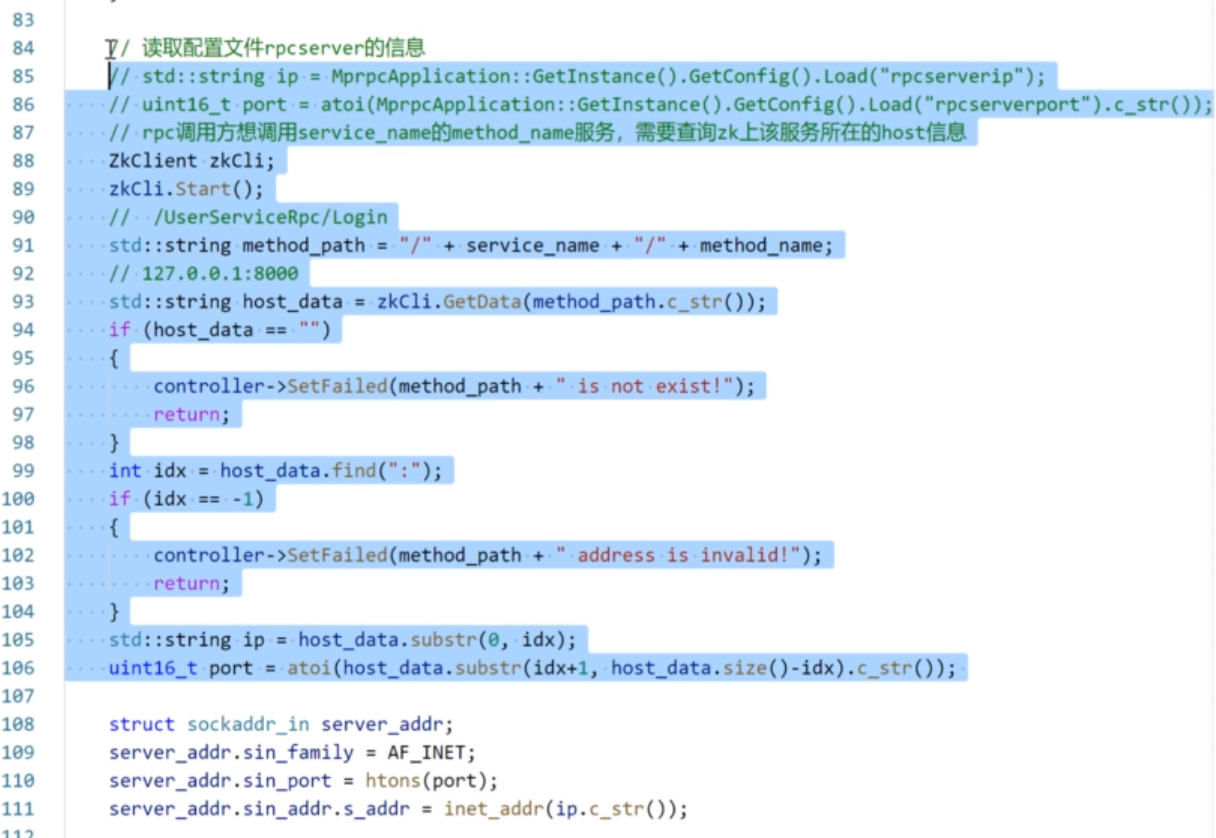
客户端
在zookeeper中查找这个数就可以了















 9602
9602











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









