






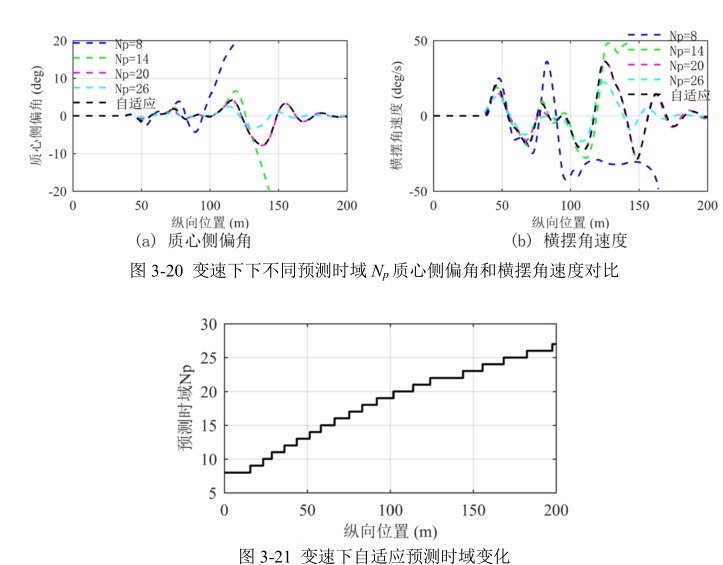
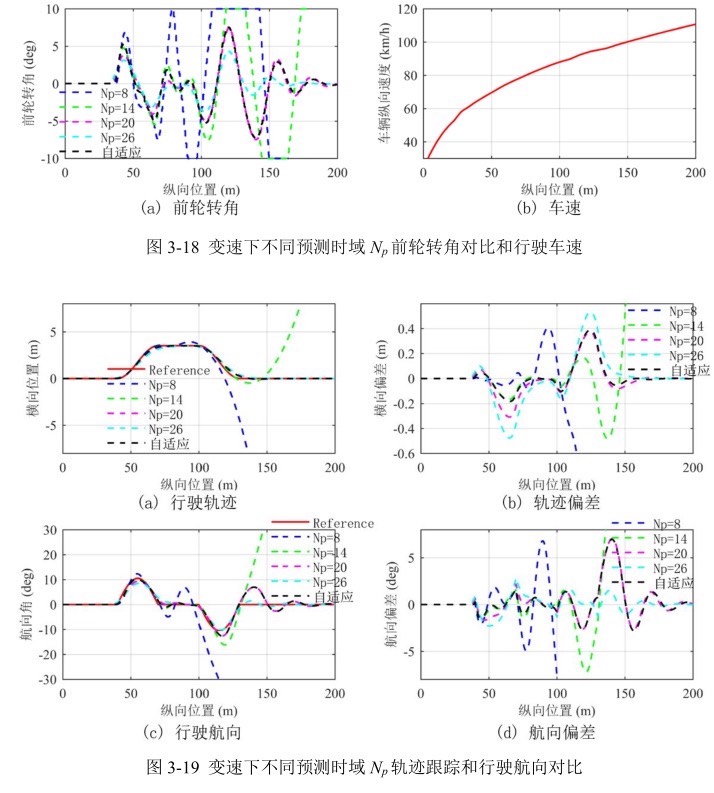
基于车速的变预测时域的MPC自适应轨迹跟踪控制,能够预测时域的, 类似驾驶员模型中的预瞄距离,在不同的车速下,预瞄控制器采用不同预瞄距离产生的控制效果不同,通过carsim与simulink联合仿真结果发现,改进后的轨迹跟踪控制器既满足了车辆低速行驶下的轨迹跟踪精度,也一定程度上克服了高速下车辆容易失去稳定性的问题。
有详细的lunwen分析说明和资料
ID:19180683710008880
想剁手书屋14
基于车速的变预测时域的MPC自适应轨迹跟踪控制技术
摘要:随着自动驾驶技术的快速发展,轨迹跟踪控制成为了自动驾驶系统中的重要环节。本文提出了一种基于车速的变预测时域的MPC自适应轨迹跟踪控制方法,该方法具有较高的运行效率和较好的控制精度。通过实际车辆的联合仿真结果验证了该方法的有效性。
- 引言
自动驾驶技术得到了广泛关注和应用,其中轨迹跟踪控制是实现自动驾驶的关键技术之一。为了保证车辆在多样化道路环境下能够精确地跟踪预定轨迹,研究者提出了许多轨迹跟踪控制方法。然而,现有的方法在不同车速下存在一定的问题,如低速下精度不高、高速下稳定性差等。因此,本文提出了一种基于车速的变预测时域的MPC自适应轨迹跟踪控制方法,以解决这些问题。
- 系统建模与控制器设计
2.1 车辆动力学模型
在本文中,我们采用了基于车辆四轮悬挂动力学模型进行建模。该模型包括纵向和横向动力学方程,并考虑了车辆质量、轮胎特性以及车辆悬挂系统等因素。
2.2 MPC控制器设计
为了实现精确的轨迹跟踪控制,本文采用了基于模型预测控制(Model Predictive Control,MPC)的方法。MPC是一种能够预测未来状态并优化控制输入的控制策略,通过最小化预测误差和控制输入的代价函数来实现控制目标。
2.3 自适应预瞄距离设计
为了解决不同车速下预瞄距离产生的控制效果不同的问题,本文设计了一种基于车速的自适应预瞄距离策略。该策略通过根据车速的变化调整预瞄距离,使得在不同车速下能够获得最优的控制效果。
- 联合仿真与结果分析
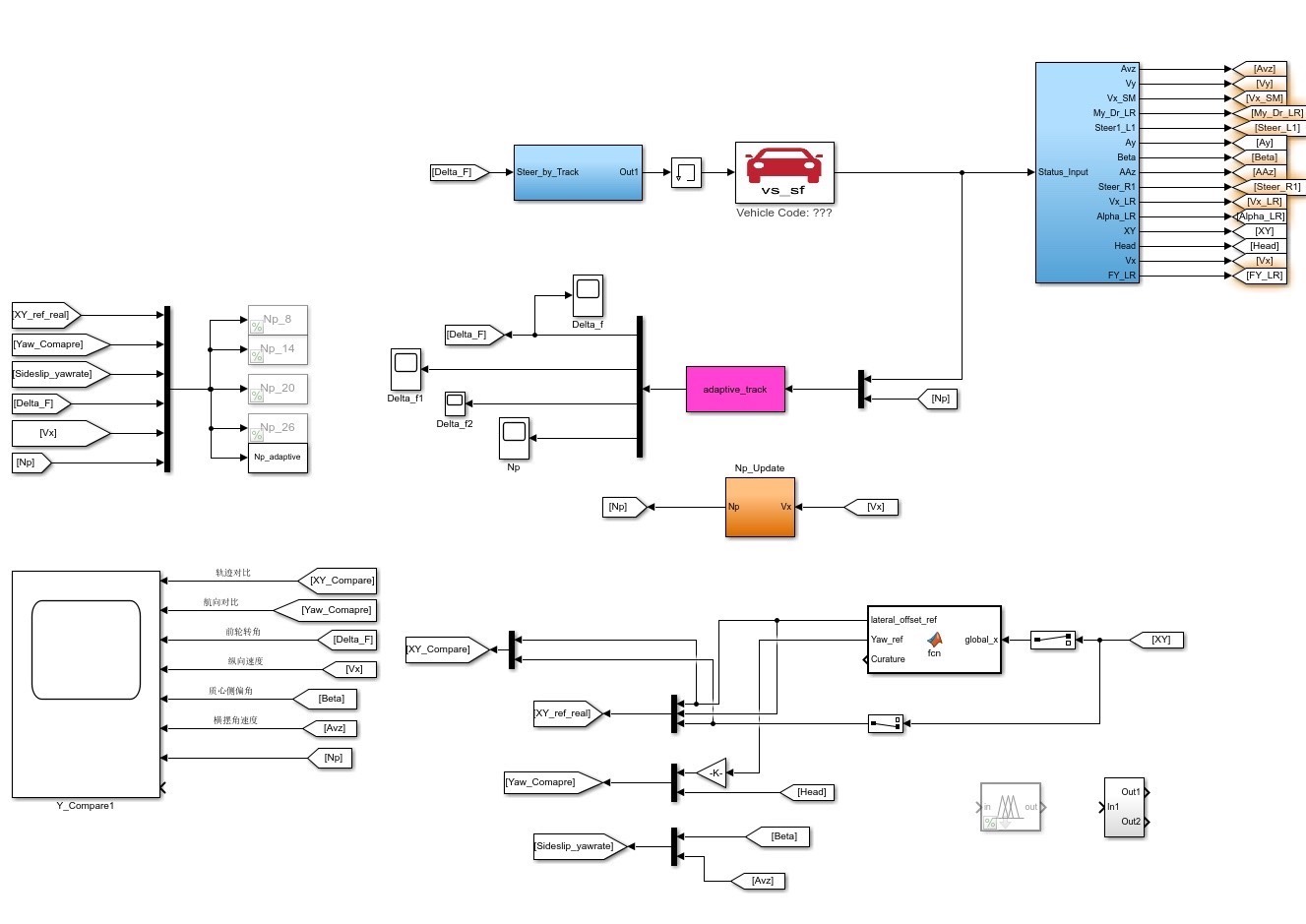
为了验证所提出的轨迹跟踪控制方法的有效性,本文使用Carsim和Simulink进行了联合仿真。通过对比改进后的控制器与传统控制方法的仿真结果,我们发现改进后的控制器在低速行驶下具有较高的轨迹跟踪精度,并且在高速行驶下能够克服车辆失去稳定性的问题。
- 结论
本文针对传统轨迹跟踪控制方法在不同车速下存在的问题,提出了一种基于车速的变预测时域的MPC自适应轨迹跟踪控制方法。通过实际仿真结果验证,该方法能够同时满足低速行驶下的轨迹跟踪精度和高速行驶下的稳定性要求。未来的研究可以进一步优化控制器设计,提高控制效果,并在实际自动驾驶系统中进行验证。
关键词:自动驾驶;轨迹跟踪控制;MPC;预瞄距离;车速自适应;车辆动力学模型;联合仿真;控制精度;稳定性
相关的代码,程序地址如下:http://fansik.cn/683710008880.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









