







一. 模式匹配简介:
模式匹配 ——> 寻找待匹配图像和全体图像中最相似的部分,常用于物体检测任务。虽然现在使用卷积神经网络做物体检测任务有更好的效果,但是模式匹配是最基本的物体检测方法,它很基础,很重要。
二. 模式匹配算法:
原图像为 I(H X W),待匹配图像为 T(h X w)。
1. 对于图像 I:,for j in range(H-h):for i in range(W-w) 。在一次移动一像素的过程中,计算原图像的一部分 I[j:j+h,i:i+w] 与待匹配图像 T 的相似度 S。
注:像模式匹配这样,从图像的左上角开始向右顺序进行查找的操作称为光栅扫描(Raster Scan),或滑动窗口扫描(Sliding window)。
2. S 最大或者最小的地方即为匹配到的位置。
S 的计算方法主要有 SSD(Sum of Squared Difference:误差平方和)、SAD(Sum of Absolute Differences:误差绝对值和)、NCC(Normalization Cross Correlation:归一化交叉相关)、ZNCC(Zero-mean Normalization Cross Correlation:零均值归一化交叉相关),对于不同的方法,我们需要选择出 S 的最大值或者最小值,然后找到 S 的值对应的在原图像中的位置。
三. 不同的模式匹配标准(不同的 S)
S = SSD(Sum of Squared Difference),S 取最小的值。

SSD(误差平方和)最小 ↑
python实现核心代码:_v = np.sum((img[y:y+Ht, x:x+Wt] - temp) ** 2)
S = SAD(Sum of Absolute Differences),S 取最小的值。

SAD(误差绝对值之和)最小 ↑
python实现核心代码:_v = np.sum(np.abs(img[y:y+Ht, x:x+Wt] - temp))
S = NCC(Normalization Cross Correlation),S 取最大的值。求出两个图像的相似度,S 的范围为[-1,1],S 对变化十分敏感。
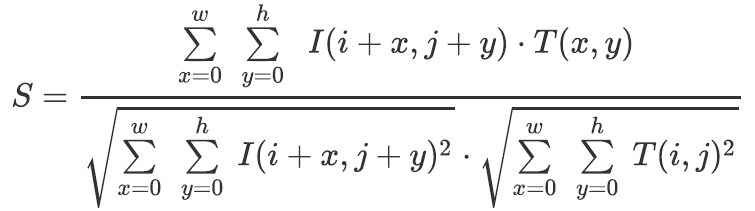
NCC(归一化交叉相关)最大 ↑
python实现核心代码:_v = np.sum(img[y:y+Ht, x:x+Wt] * temp)
_v /= (np.sqrt(np.sum(img[y:y+Ht, x:x+Wt]**2)) * np.sqrt(np.sum(temp**2)))
S = ZNCC(Zero-mean Normalization Cross Correlation),S 取最大的值。它比归一化交叉相关更加敏感。图像 I 的平均值为 m_i,图像 T 的平均值为 m_t。S 的范围为 [-1,1]。
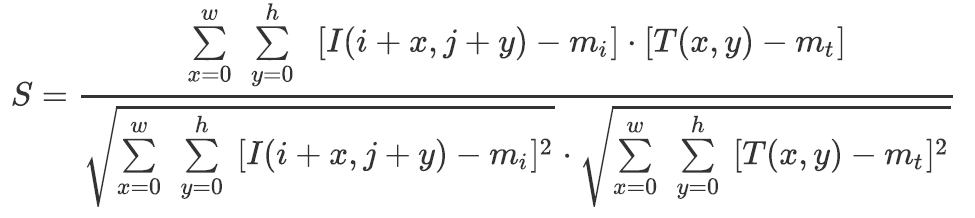
ZNCC(零均值归一化交叉相关)最大 ↑
python实现核心代码:_v = np.sum((img[y:y+Ht, x:x+Wt]-mi) * (temp-mt))
_v /= (np.sqrt(np.sum((img[y:y+Ht, x:x+Wt]-mi)**2)) * np.sqrt(np.sum((temp-mt)**2)))
四. python实现零均值归一化交叉相关。不同的 S ,读者可举一反三
import cv2 as cv
import numpy as np
# Read image
img = cv.imread("../bird.png").astype(np.float32)
H, W, C = img.shape
mi = np.mean(img)
# Read templete image
temp = cv.imread("../bird_e.png").astype(np.float32)
Ht, Wt, Ct = temp.shape
mt = np.mean(temp)
# Templete matching
i, j = -1, -1
v = -1
for y in range(H-Ht):
for x in range(W-Wt):
_v = np.sum((img[y:y+Ht, x:x+Wt]-mi) * (temp-mt))
_v /= (np.sqrt(np.sum((img[y:y+Ht, x:x+Wt]-mi)**2)) * np.sqrt(np.sum((temp-mt)**2)))
if _v > v:
v = _v
i, j = x, y
out = img.copy()
cv.rectangle(out, pt1=(i, j), pt2=(i+Wt, j+Ht), color=(0,0,255), thickness=1)
out = out.astype(np.uint8)
# Save result
cv.imwrite("out.jpg", out)
cv.imshow("result", out)
cv.waitKey(0)
cv.destroyAllWindows()五. 实验结果:

ZNCC(零均值归一化交叉相关)模式匹配结果 ↑
六. python实现 S=误差绝对值之和。不同的 S ,读者可举一反三
import cv2
import numpy as np
# Read image
img = cv2.imread("../baby.png").astype(np.float32)
H, W, C = img.shape
# Read templete image
temp = cv2.imread("../baby_m.png").astype(np.float32)
Ht, Wt, Ct = temp.shape
# Templete matching
i, j = -1, -1
v = 255 * H * W * C
for y in range(H-Ht):
for x in range(W-Wt):
_v = np.sum(np.abs(img[y:y+Ht, x:x+Wt] - temp))
if _v < v:
v = _v
i, j = x, y
out = img.copy()
# (0,0,255) 代表红色
cv2.rectangle(out, pt1=(i, j), pt2=(i+Wt, j+Ht), color=(0,0,255), thickness=2)
out = out.astype(np.uint8)
# Save result
cv2.imwrite("out.jpg", out)
cv2.imshow("result", out)
cv2.waitKey(0)
cv2.destroyAllWindows()七. 实验结果:
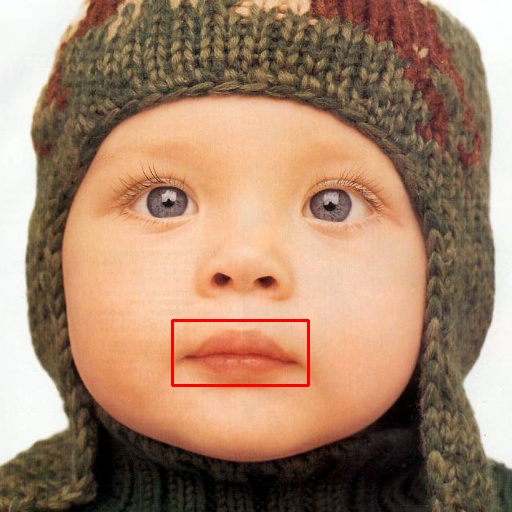
SAD(误差绝对值之和)模式匹配结果 ↑
八. 写在最后的话:
感谢您的阅读,如果您觉得本文不错,可以点赞哦!
九. 版权声明:
未经作者允许,请勿随意转载抄袭,抄袭情节严重者,作者将考虑追究其法律责任,创作不易,感谢您的理解和配合!

















 1168
1168

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









