









i.MX8MP 双系统实战:Linux 与 RTOS 协同运行与通信机制全解析
平台:NXP i.MX 8M Plus EVK
主系统:Linux (Yocto 构建)
从系统:RTOS(如 FreeRTOS、RTThread、Zephyr 等)
目标:实现异构双系统协同运行,掌握 Linux 与 RTOS 的典型通信方式
一、背景介绍:为何要用 Linux + RTOS 双系统?
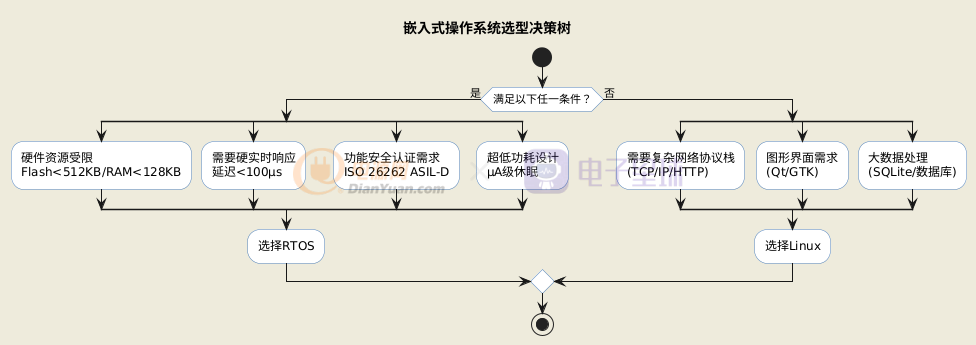
随着嵌入式系统复杂度的提高,单一操作系统已经无法满足一些同时需要图形界面 + 实时控制的应用场景。Linux 虽然功能强大,但实时性差;RTOS 实时性好,但生态能力有限。NXP 推出的 i.MX8MP 系列 SoC,内建高性能 Cortex-A53 核心和低功耗 Cortex-M7 核心,为双系统架构提供了理想平台。
应用场景举例:
- 医疗设备(Linux 运行图形界面,RTOS 控制实时传感器)
- 工业控制(Linux 管理网络通信,RTOS 实现精准控制)
- 智能语音(Linux 运行语音识别,RTOS 处理低功耗麦克风控制)
- 多媒体终端(Linux 播放媒体,RTOS 控制遥控/传感器)
二、i.MX8MP 处理器架构分析
i.MX8MP 是一款异构多核处理器,其主要核心资源如下:
| 核心类型 | 数量 | 特性 | 典型用途 |
|---|---|---|---|
| Cortex-A53 | 4 | 64 位,支持 Linux | 主系统运行 Linux |
| Cortex-M7 | 1 | 32 位,低功耗,RTOS | 实时控制、MCU任务 |
| Vivante GPU | 1 | OpenGL ES 支持 | 图形加速(Linux) |
| VPU/ISP/NPU | 多 | 多媒体/AI | Linux 驱动下运行 |
i.MX8MP 内部通过 AHB、AXI 总线连接各个模块,支持共享 RAM、MailBox 等交互机制。
三、系统构建方案概览
1. 主系统:基于 Yocto 项目的 Linux
通常使用 NXP 提供的 imx-linux 代码仓构建 Linux 系统,主控 Cortex-A53。
- 启动方式:u-boot + Linux kernel
- 根文件系统:Yocto 构建的 rootfs
- 主要功能:界面、网络、多媒体、AI
📖 推荐阅读:Yocto 项目实战教程(京东购买) —— 本书中详细讲解了 Linux 镜像构建、设备树配置与驱动集成过程。
2. 从系统:基于 RTOS 的 M7 程序
- 启动方式:从 u-boot 加载
.elf或.bin至 TCM - 运行位置:Cortex-M7 独立运行,不依赖 Linux
- 常用 RTOS:FreeRTOS、RTThread、Zephyr
- 编译工具链:arm-none-eabi-gcc
四、Linux 与 RTOS 的典型交互方式
i.MX8MP 支持多种主从系统通信机制,核心如下:
1. 共享内存机制(Shared Memory)
通过预留的 DDR 或 OCRAM 区域,Linux 和 M7 RTOS 之间可共享数据缓冲区。
2. Mailbox 通信(Messaging Unit,MU)
NXP 芯片中内建 MU 单元,实现中断通知功能,支持事件传递。
3. RPMsg 通信协议
最推荐的通信方式,基于 virtio + MU 实现,Linux 侧表现为 /dev/ttyRPMSGx 字符设备。
- Linux 端驱动:
imx_rpmsg_tty.c - RTOS 端驱动:
rpmsg_lite+erpc机制
4. 资源隔离配置
通过 device tree 和链接脚本划分 DDR、OCRAM 等共享区,防止访问冲突。
五、实战步骤:搭建 i.MX8MP 的 Linux + RTOS 双系统
1. 准备软件环境
- Yocto 镜像构建环境(如
imx-image-full) - MCUXpresso SDK for M7 端工程
- arm64 与 arm-none-eabi 工具链
2. 构建 Linux 镜像
repo init -u https://github.com/nxp-imx/imx-manifest -b imx-linux-mickledore
repo sync -j4
source setup-environment build
bitbake imx-image-full
3. 构建 RTOS 固件(以 FreeRTOS 为例)
修改链接脚本,确认加载地址正确(如 0x48000000),并编译生成 .bin:
cmake -Bbuild -DCMAKE_TOOLCHAIN_FILE=toolchain.cmake
make -C build
4. 启动配置与调试
- u-boot 中添加启动命令:
fatload mmc 1:1 0x48000000 m7_app.bin
bootaux 0x48000000
- 使用串口查看 M7 输出,验证运行状态
5. 配置 RPMsg 通信并测试
- Linux 侧启用内核驱动:
modprobe imx_rpmsg_tty
ls /dev/ttyRPMSG*
- 编写测试程序收发:
int fd = open("/dev/ttyRPMSG0", O_RDWR);
write(fd, "hello", 5);
read(fd, buf, sizeof(buf));
六、典型问题分析
| 问题 | 原因分析 | 解决建议 |
|---|---|---|
| M7 启动失败 | 地址错误,权限未开启 | 检查链接地址和 u-boot 配置 |
| 无法看到 ttyRPMSG0 | 驱动未启用,M7 未初始化 | 启用 CONFIG_RPMSG_CHAR |
| 通信乱码或丢包 | 时序不同步,协议不一致 | 使用 erpc_rpmsg_lite 框架 |
| DDR 访问冲突 | 内存分配不合理 | 通过设备树划分内存区 |
七、总结与发展方向
基于 i.MX8MP 的 Linux + RTOS 双系统设计,提供了图形+实时、智能+控制并存的方案,具备极高工程价值。
未来发展方向:
- 基于 RPMsg + eRPC 实现高层服务调用
- 接入 Zephyr 构建更安全的 M7 子系统
- 搭配 OP-TEE 实现安全隔离控制
八、推荐资料
- 📗 NXP 官方文档:i.MX8MP Technical Reference Manual
- 📘 Yocto 项目实战教程:高效定制嵌入式 Linux 系统(京东购买链接)
- 📘 MCUXpresso SDK:可从 NXP 官网根据芯片型号下载
📽️ 视频教程请关注 B 站:“嵌入式 Jerry”
📘 支持作者,点击京东购买《Yocto 项目实战教程》

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









