







简介
上两篇介绍了基本定时器和通用定时器,下面是文章的链接。
TIMER基本定时器详解+1毫秒延时例程
TIMER通用定时器详解+PWM波形输出捕获例程
这一篇来介绍GD32中最后一类定时器——高级定时器。
下面按惯例附上GD32中3类定时器的差异表。

高级定时器比最高级的L0通用定时器,多出了可编程的计数器重复功能、互补和死区功能和终止输入的功能。
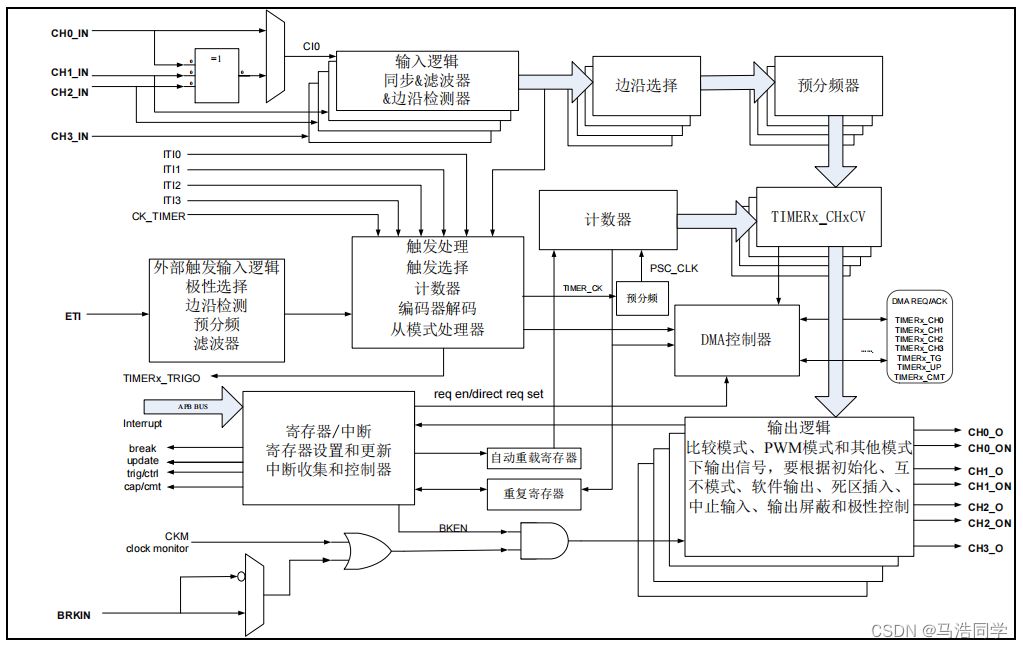
下面是高级定时器的基本架构框图。
重复计数器
重复计数器是用来在N+1个计数周期之后产生更新事件,更新定时器的寄存器。N为重复计数器中的起始值,为用户所确定。重复计数器是一个向下计数的计数器,每次定时器产生上溢或下溢时,重复计数器的值自减一,达到零时产生更新事件,复位定时器。
下面是定时器向上计数模式下重复计数器N为0、1和2时的时序图。
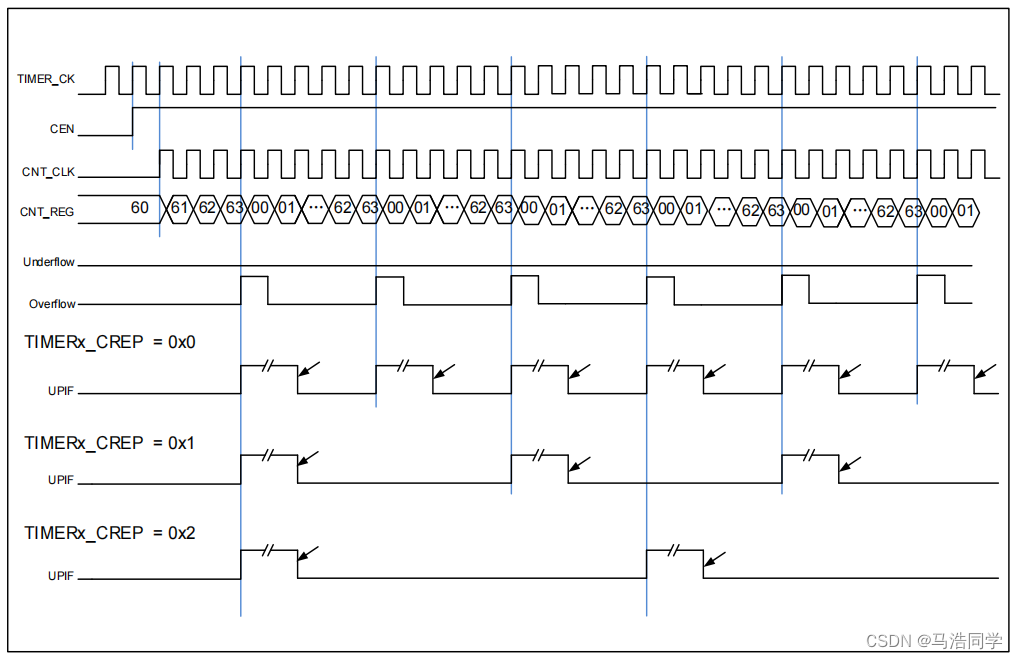
对于初学者有一个误区就是,以为定时器只要达到了重装载值,产生溢出,就会产生更新事件;而事实上即使计数器溢出,但只要重复计数器的值不为0,定时器就不会硬件发出更新事件。
但也有特例,比如由用户软件产生或通过硬件从模式控制器产生,那么重复计数器为任何值,更新事件都会产生。
对于基本定时器和通用定时器,因为它们并不支持重复计数器特性,因此不需要考虑这一点。
互补模式和死区插入
互补模式和死区插入通常是在一起使用的。互补模式十分好理解,就是定时器可以输出两路互补的信号,但死区时间就比较难理解,下面通过一张时序图来帮助理解。
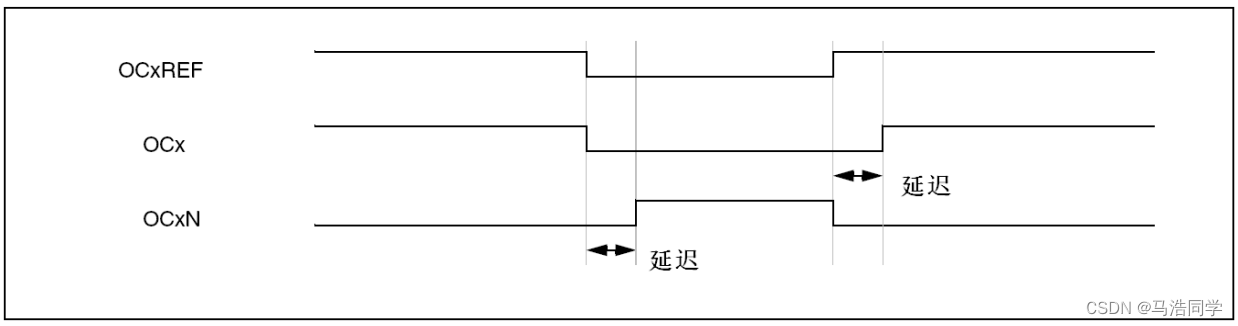
从上图可以看到,OCx和OCxN两路互补信号并不是完全对齐的,带有一定的延时,这个延时就是死区时间。
下面是一个更加完整的时序图。
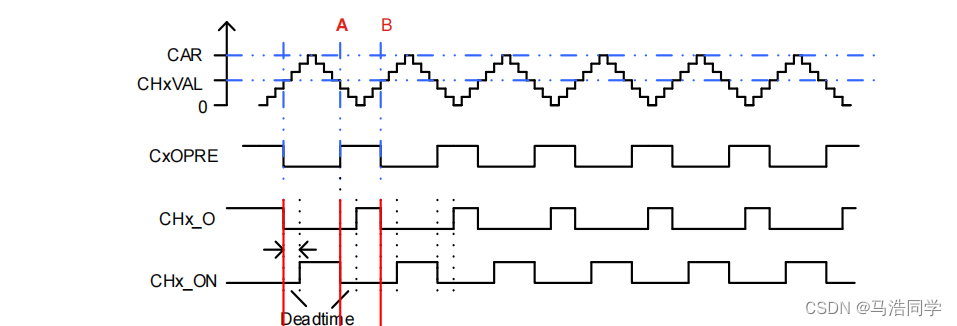
我们先看CHx_ON信号,当计数器的值达到输出比较值的时候,它并没有立即切换到高电平,而是等待一段时间后再切换;对于CHx_O信号也是如此,当计数器的值小于输出比较值时,它也没有立即切换至高电平,而是等待一段时间后再切换。
那么这种死区时间有什么用呢?下面引用一段解释。
通常,大功率电机、变频器等,末端都是由大功率管、IGBT等元件组成的H桥或3相桥。每个桥的上半桥和下半桥是是绝对不能同时导通的,但高速的PWM驱动信号在达到功率元件的控制极时,往往会由于各种各样的原因产生延迟的效果,造成某个半桥元件在应该关断时没有关断,造成功率元件烧毁。
死区就是在上半桥关断后,延迟一段时间再打开下半桥或在下半桥关断后,延迟一段时间再打开上半桥,从而避免功率元件烧毁,这段延迟时间就是死区(就是上、下半桥的元件都是关断的)。死区时间控制在通常的低端单片机所配备的PWM中是没有的。
中止模式
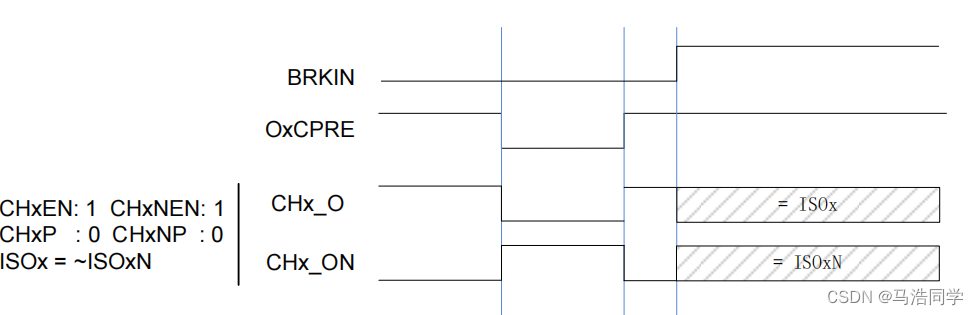
中止模式就是当定时器接收到了中止源的有效信号时,使定时器的输出处于某个特定状态。
中止源可以设置为高电平有效或低电平有效,在终止模式下定时器输出的电平值由TIMERx_CTL1寄存器的ISOx和ISOxN位决定。
下面是一个通道响应中止信号的时序图。
霍尔传感器接口功能
霍尔传感器接口的作用是用来控制无刷直流(BLDC)电机。
BLDC电机中有3个霍尔传感器,它们能监测磁场的变化,当电机旋转时,霍尔传感器的值也会相应变化。通过读取这3个信号,我们就能计算出转子的速度和位置,进而调整对电机的控制。
下面是一个BLDC电机连接的示意图。
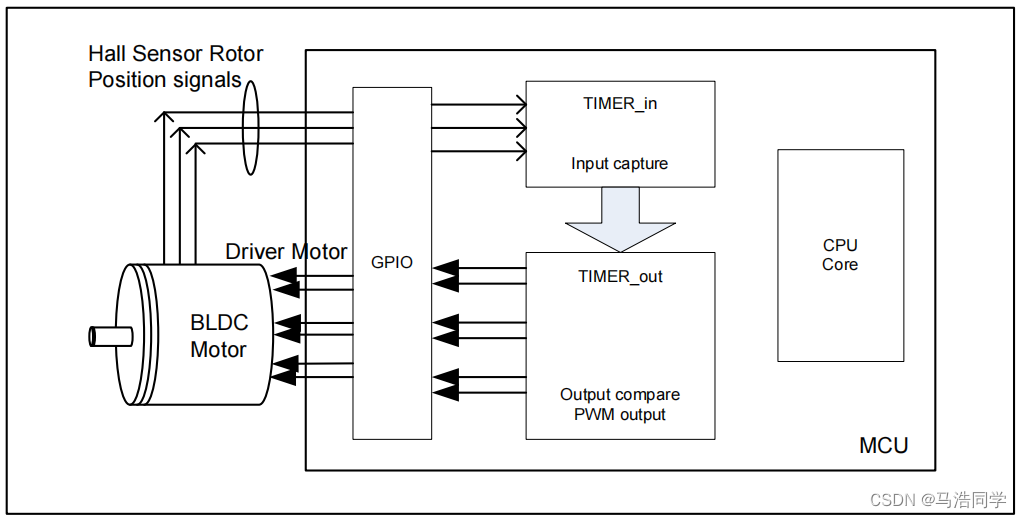
要完整地控制一个BLDC电机,需要两个定时器,一个定时器负责捕获霍尔传感器的数据,一个定时器负责控制电机的旋转。
其中,负责捕获霍尔传感器数据的定时器需要有异或功能,这个高级定时器和L0通用定时器都满足;而负责控制电机的定时器需要有输出互补信号和死区插入的能力,这个只有高级定时器能满足。
下面展示一张使用2个定时器控制BLDC电机的时序图。
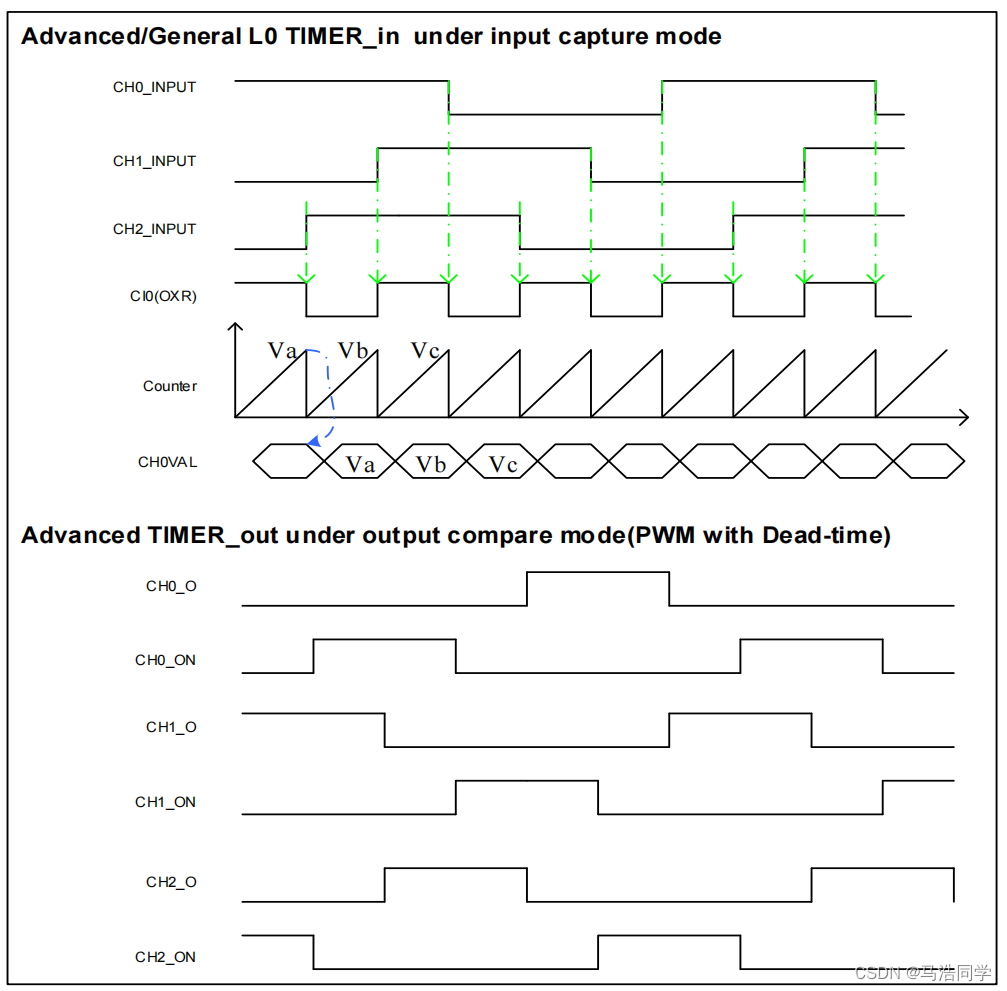
鉴于我对BLDC的控制还不是很了解,因此这里先略过了。等以后接触了BLDC电机的控制项目再回来补这一个坑。
DMA模式
定时器的DMA模式稍微有点特别,因为定时器的内部有多个寄存器可以接收DMA的数据传输;因此,当定时器内部产生了中断事件,定时器就会给DMA发送请求,DMA响应请求就会把数据传输至TIMERx_DMATB寄存器,但这个寄存器只是作为一个缓冲区,之后定时器根据用户的映射,才会把里面的数据传输进最终的内部寄存器中。
定时器的DMA功能在某些应用中是相当有用的;例如,它能够在定时器工作的中途对输出比较寄存器的值进行修改,这样我们可以连续输出不同占空比的PWM信号;又例如,在定时器工作的中途修改重装载值,这样我们可以实现不同周期的连续计时。
通过DMA进行修改的好处是我们不需要停止定时器,修改定时器寄存器,再开启定时器;DMA能实现连贯的修改操作,不用中断定时器的工作。
例程
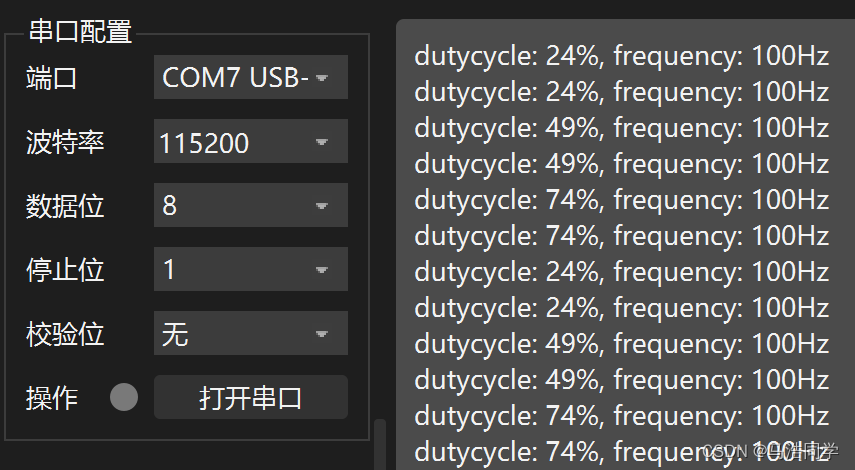
在这个例程中我们使用两个定时器,一个定时器负责输出PWM信号,并且使用DMA功能使它的PWM占空比随时变化,另一个定时器负责捕获PWM信号,计算其频率和占空比,并通过串口输出结果。
负责输出的定时器使用定时器0,输出到通道0,对应PA8管脚。PWM的输出频率为100Hz,为了降低占空比的更新频率,我把重复计数器的值设置为99,这样定时器每1秒才会发出更新事件,并请求DMA传输,DMA要使能循环模式,这样它就能一直重复进行传输。负责输入捕获的定时器和上一篇文章是一样的,所以这里就不再赘述了。
timer.c文件
#include "timer.h"
static uint16_t buffer[3] = {2499, 4999, 7499};
void TIM_DmaInit(void)
{
/* 初始化GPIO */
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
/* PWM输出管脚为复用推挽模式 */
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);
/* PWM输入管脚为浮空输入模式 */
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_6);
/* 初始化DMA */
dma_parameter_struct dma_init_struct = {0};
rcu_periph_clock_enable(RCU_DMA0);
dma_deinit(DMA0, DMA_CH4);
dma_init_struct.direction = DMA_MEMORY_TO_PERIPHERAL; // 内存到外设模式
dma_init_struct.memory_addr = (uint32_t)buffer; // 内存基地址
dma_init_struct.memory_inc = DMA_MEMORY_INCREASE_ENABLE; // 开启内存地址自增
dma_init_struct.memory_width = DMA_MEMORY_WIDTH_16BIT; // 内存宽度16位
dma_init_struct.number = 3; // 3个数据包
dma_init_struct.periph_addr = (uint32_t)(TIMER0 + 0x34); // 外设基地址
dma_init_struct.periph_inc = DMA_PERIPH_INCREASE_DISABLE; // 关闭外设基地址自增
dma_init_struct.periph_width = DMA_PERIPHERAL_WIDTH_16BIT; // 外设宽度16位
dma_init_struct.priority = DMA_PRIORITY_ULTRA_HIGH; // 优先级高
dma_init(DMA0, DMA_CH4, &dma_init_struct);
dma_circulation_enable(DMA0, DMA_CH4); // 开启循环模式
dma_memory_to_memory_disable(DMA0, DMA_CH4); // 关闭内存到内存模式
dma_channel_enable(DMA0, DMA_CH4); // 使能DMA
/* 初始化TIMER0 */
timer_oc_parameter_struct timer_ocintpara = {0};
timer_parameter_struct timer_initpara = {0};
rcu_periph_clock_enable(RCU_TIMER0);
timer_deinit(TIMER0);
timer_initpara.prescaler = (108 - 1); // 预分频:108MHz / 108 = 1MHz
timer_initpara.alignedmode = TIMER_COUNTER_EDGE; // 边沿对齐计数
timer_initpara.counterdirection = TIMER_COUNTER_UP; // 向上计数
timer_initpara.period = (10000 - 1); // 周期:1MHz / 10000 = 100Hz
timer_initpara.repetitioncounter = (100 - 1); // 重复计数器,每100个周期更新一次,即每1秒更新一次
timer_init(TIMER0, &timer_initpara);
timer_ocintpara.outputstate = TIMER_CCX_ENABLE; // 使能输出比较
timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH; // 输出极性为高
timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_HIGH; // 空闲电平高
timer_channel_output_config(TIMER0, TIMER_CH_0, &timer_ocintpara);
timer_channel_output_pulse_value_config(TIMER0, TIMER_CH_0, buffer[0]); // 设置输出比较值
timer_channel_output_mode_config(TIMER0, TIMER_CH_0, TIMER_OC_MODE_PWM0); // 设置为PWM模式0
timer_channel_output_shadow_config(TIMER0, TIMER_CH_0, TIMER_OC_SHADOW_DISABLE); // 关闭输出比较影子
timer_primary_output_config(TIMER0, ENABLE); // 使能所有通道
timer_dma_enable(TIMER0, TIMER_DMA_UPD); // 使能更新事件DMA请求
timer_auto_reload_shadow_enable(TIMER0); // 使能自动重装载影子
timer_enable(TIMER0); // 使能定时器
/* 初始化TIMER2 */
timer_ic_parameter_struct timer_icinitpara = {0};
rcu_periph_clock_enable(RCU_TIMER2);
timer_deinit(TIMER2);
timer_initpara.prescaler = (108 - 1); // 预分频:108MHz / 108 = 1MHz
timer_initpara.alignedmode = TIMER_COUNTER_EDGE; // 边沿对齐计数
timer_initpara.counterdirection = TIMER_COUNTER_UP; // 向上计数模式
timer_initpara.period = (65536 - 1); // 周期最好设置为最高,以免计数器溢出
timer_initpara.clockdivision = TIMER_CKDIV_DIV1; // 输入时钟1分频
timer_init(TIMER2,&timer_initpara);
timer_icinitpara.icpolarity = TIMER_IC_POLARITY_RISING; // 输入极性为上升沿,即上升沿有效
timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI; // 输入捕获通道连接至CIx
timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1; // 时钟1分频
timer_icinitpara.icfilter = 0x0;
timer_input_pwm_capture_config(TIMER2, TIMER_CH_0, &timer_icinitpara);
timer_input_trigger_source_select(TIMER2, TIMER_SMCFG_TRGSEL_CI0FE0); // 输入触发源为通道0
timer_slave_mode_select(TIMER2, TIMER_SLAVE_MODE_RESTART); // 从模式选择为复位模式
timer_master_slave_mode_config(TIMER2, TIMER_MASTER_SLAVE_MODE_ENABLE); // 使能从模式
timer_auto_reload_shadow_enable(TIMER2); // 使能重装载影子
nvic_priority_group_set(NVIC_PRIGROUP_PRE4_SUB0); // 抢占优先级4位,响应优先级0位
nvic_irq_enable(TIMER2_IRQn, 1, 0); // 使能中断服务,抢占优先级为1
timer_interrupt_flag_clear(TIMER2, TIMER_INT_CH0); // 清除通道0中断标志位
timer_interrupt_enable(TIMER2, TIMER_INT_CH0); // 使能通道0中断
timer_enable(TIMER2); // 使能定时器2
}
gd32f10x_it.c文件
void TIMER2_IRQHandler(void)
{
if(SET == timer_interrupt_flag_get(TIMER2, TIMER_INT_CH0))
{
timer_interrupt_flag_clear(TIMER2, TIMER_INT_CH0); // 清除中断标志位
ic1value = timer_channel_capture_value_register_read(TIMER2, TIMER_CH_0) + 1;
if(0 != ic1value)
{
ic2value = timer_channel_capture_value_register_read(TIMER2, TIMER_CH_1) + 1;
dutycycle = (ic2value * 100) / ic1value; // 计算占空比
frequency = (float)1000000 / ic1value; // 计算频率
}
else
{
dutycycle = 0;
frequency = 0;
}
}
}
main.c文件
#include "gd32f10x.h"
#include "main.h"
#include "systick.h"
#include "usart.h"
#include "timer.h"
#include <stdio.h>
#include <string.h>
extern __IO uint16_t dutycycle;
extern __IO uint16_t frequency;
int main(void)
{
systick_config();
USART_Config();
TIM_DmaInit();
while(1)
{
printf("dutycycle: %d%%, frequency: %dHz\n", dutycycle, frequency);
delay_ms(500);
}
}

















 2609
2609











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











