









1.1亚像素边缘定位技术简介
定位精度为整像素级的边缘检测算法,实际上,边缘的位置存在于像素的任何位置,理论上讲,整像素级边缘定位最大误差为 0.5 个像素,两个特征点间的像素个数就有可能存在着 1 个像素的误差。提高硬件分辨率,可以减少像素值,从而提高测量精度,但是这种硬件的提高将极大地增加系统的成本,而且在图像传输速度和图像的存储容量方面都大大增加了对系统的要求。
实际的CCD成像系统,CCD感光元不但接收照射到自身感光面的光,还接收照射相邻感光元的光,尤其是对边缘点,物体和背景的不同反射特性以及CCD器件的积分效应,造成CCD器件对阶跃边缘的响应产生由明到暗(或由暗到明)的渐变过程,边缘点的亚像素位置恰好存在于这一过渡的渐变阶段,这就使得我们有可能采用插值或曲线逼近等方法获得边缘点的亚像素位置。
在各种文献资料中,并没有给出亚像素的明确定义,可以理解为一种提高精度的算法,或者说一种可以使分辨率小于1个像素的图像处理技术。亚像素定位技术使用的前提是:目标不是由孤立的单个像素点,而必须是由特定灰度分布和形状分布的一组像素点组成,有明显的灰度变化和一定的面积大小。
1.2亚像素算法的选用条件
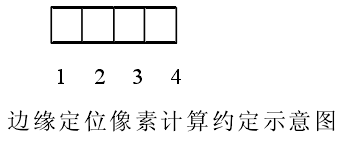
考虑到像素存在大小,我们在计算像素的时候有如下约定:
a) 灰度矩像素从0.5开始计算,而空间矩和前后向差分加曲线拟合从0开始计算;
b) 带小数的像素表示不足 1 个像素,如下图所示,对灰度矩来讲,若边
缘定位计算的数值为1,即边缘在1和2像素之间,若边缘定位为1.5,是指边缘在像素2中间。
1.3亚像素算法的精度
由于实际中存在的一些误差因素,如有限采样宽度带来的灰度平均效应、灰度量化误差和噪声等,因此使用亚像素定位技术并不是说可以把目标定位到绝对准确的边缘位置上,其定位精度是有限的。在理想情况下,灰度矩和前后向差分加曲线拟合两种亚像素定位算法,当选择对称像素点计算,在两种极限状态下(边缘在两个像素之间和边缘在1个像素中间),可以实现无偏的亚像素精度估计。
1.4亚像素边缘检测算法
亚像素定位算法的已经比较成熟且分类日趋明确,其大致可以分为以下三类:曲线拟合法、插值法、基于矩的方法。
曲线拟合方法是在对边缘进行初始定位的基础上,选取参加拟合的像素点集合,然后以最小二乘为原则,采用积分的方法,提取满足边缘特征的曲线方程参数从而确定其边缘的精确位置,最小二乘法能够一次计算出边缘图像的直线或曲线部分边界,定位快速,但是这种算法要求已经明确边缘图像中像素点的分布表达式,即哪些像素点最终要拟合成直线或圆。这样同时含有直线和圆的图像的亚像素定位步骤较为复杂。
插值边缘定位方法根据构造空间拟合函数的不同,可分为线性插值方法和曲线插值方法。线性插值主要用于工业现场的在线测量中,根据离散灰度、坐标序列构造线性函数来获取最佳逼近的灰度曲线,这种方法与真实曲线接近程度差,只有在对比度强、信噪比高的情况下才能获得比较好的细分效果;曲线插值主要用于复杂背景下动态目标的跟踪、捕获、定位,是对目标运动轨迹未来走势的预估计技术,或者用于精确度要求比较高的检测场合。
总的来说,插值法的计算量小、重复性好,但定位精度较拟合法和基于矩的方法低。
矩保持法的亚像素边缘定位方法,可细分为空间矩、灰度矩、Zernike 正交矩。灰度矩边缘检测法具有对灰度平移和缩放的不变性。它利用边缘两边区域可能的分布和统计特性来定位边缘,其准确性比较差。尽管在同等条件下,相比其它矩方法,灰度矩的运算量最小,但是其在抗噪声能力和边缘定位精度方面逊色于其它两种方法。
空间矩边缘定位方法的特点是计算过程相对简单、检测精度高,可以适用于任意尺寸窗口。同时不受图像灰度数据的加性、乘性噪声变化的影响。Zernike 正交矩与空间矩的原理一致,但是处理受噪声影响或存在伪影的图片时,空间矩的定位精度要高于Zernike矩。

















 6661
6661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









