






51单片机模块学习——直流电机驱动(PWM)、AD/DA、红外遥控(外部中断)
开发软件:Keil4(编写程序)、STC-ISP(烧录下载)
开发平台:普中科技51单片机A4版本
参考:B站江协科技51单片机学习视频
十五、直流电机驱动(PWM)
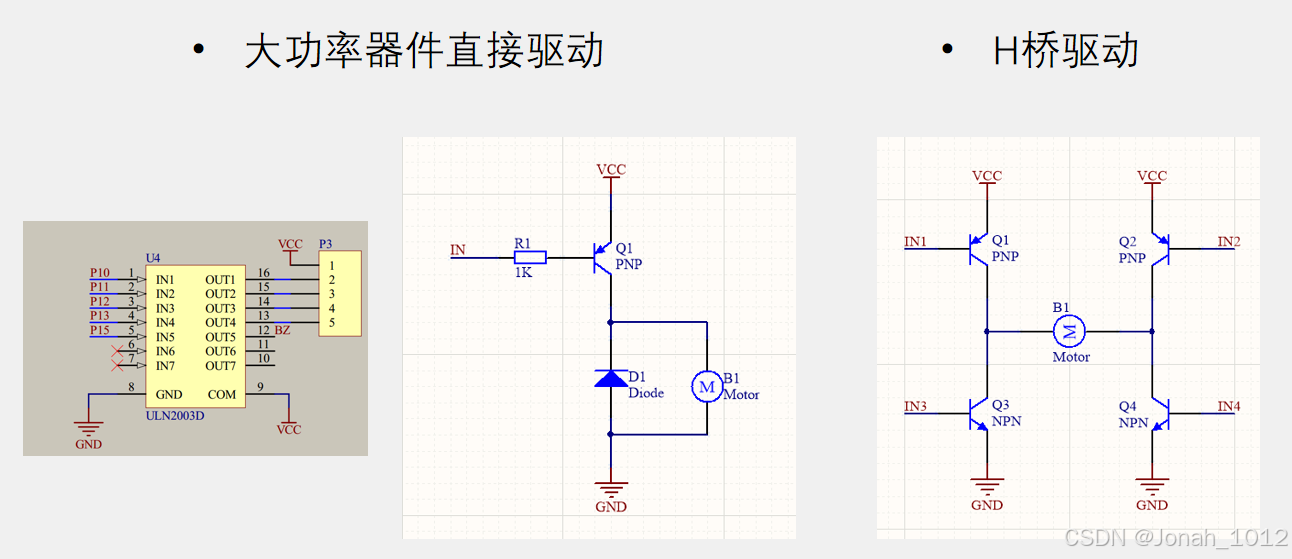
直流电机是一种将电能转换为机械能的装置。一般的直流电机有两个电极,当电极正接时,电机正转,当电极反接时,电机反转
直流电机主要由永磁体(定子)、线圈(转子)和换向器组成
除直流电机外,常见的电机还有步进电机、舵机、无刷电机、空心杯电机等
标题中的PWM是什么呢?
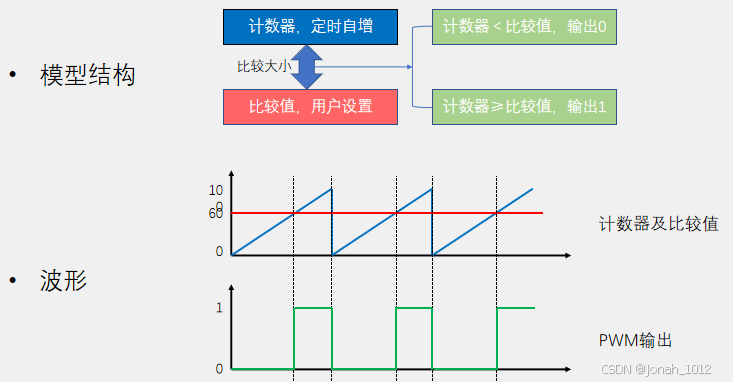
PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域
PWM重要参数:
频率 = 1 / TS 占空比 = TON / TS 精度 = 占空比变化步距
产生PWM的方法一般是设定一个比较值,计数器开始计数,当计数值小于比较值时输出0,高于比较值时输出1
15-1.LED呼吸灯
想象一下一下,在某段时间里,10%的时间,小灯点亮,90%的时间小灯熄灭;另一段时间,90%的时间,小灯点亮,10%的时间小灯熄灭
假如这个时间很短,短到我们无法发现小灯的亮灭过程,然后无限循环,我们肉眼看这两个小灯有什么区别呢?
显然,前一种小灯较暗,后一种小灯较亮
由此我们可以写下这样的代码,制作一个呼吸灯程序
//LED呼吸灯
#include <REGX52.H>
sbit LED=P2^0;
void Delay(unsigned int t)
{
while(t--);
}
void main()
{
unsigned char Time,i;
while(1)
{
for(Time=0;Time<100;Time++) //改变亮灭时间,由暗到亮
{
for(i=0;i<20;i++) //计次延时
{
LED=0; //LED亮
Delay(Time); //延时Time
LED=1; //LED灭
Delay(100-Time); //延时100-Time
}
}
for(Time=100;Time>0;Time--) //改变亮灭时间,由亮到暗
{
for(i=0;i<20;i++) //计次延时
{
LED=0; //LED亮
Delay(Time); //延时Time
LED=1; //LED灭
Delay(100-Time); //延时100-Time
}
}
}
}
15-2.直流电机调速
我们可以设定一个定时器,每过一段时间,计数器就增加,计数值高于某个阈值后,关闭马达,改变这个阈值,就可以进行直流电机调速
//直流电机调速
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Timer0.h"
sbit Motor=P1^0;
unsigned char Counter,Compare; //计数值和比较值,用于输出PWM
unsigned char KeyNum,Speed;
void main()
{
Timer0_Init();
while(1)
{
KeyNum=Key();
if(KeyNum==1)
{
Speed++;
Speed%=4;
if(Speed==0){Compare=0;} //设置比较值,改变PWM占空比
if(Speed==1){Compare=50;}
if(Speed==2){Compare=75;}
if(Speed==3){Compare=100;}
}
Nixie(1,Speed);
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
Motor=1; //输出1
}
else //计数值大于比较值
{
Motor=0; //输出0
}
}
这个程序在数码管上显示电机档位,按下按键1可以调节电机档位。
十六、AD/DA
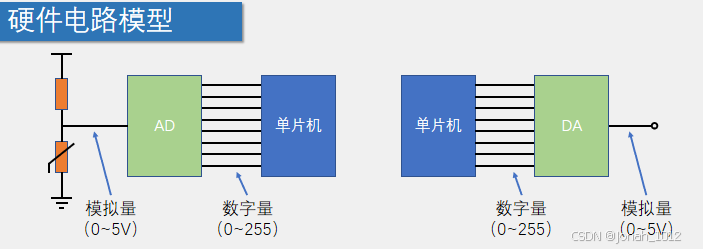
AD(Analog to Digital):模拟-数字转换,将模拟信号转换为计算机可操作的数字信号
DA(Digital to Analog):数字-模拟转换,将计算机输出的数字信号转换为模拟信号
AD/DA转换打开了计算机与模拟信号的大门,极大的提高了计算机系统的应用范围,也为模拟信号数字化处理提供了可能
AD转换通常有多个输入通道,用多路选择开关连接至AD转换器,以实现AD多路复用的目的,提高硬件利用率
AD/DA与单片机数据传送可使用并口(速度快、原理简单),也可使用串口(接线少、使用方便)
可将AD/DA模块直接集成在单片机内,这样直接写入/读出寄存器就可进行AD/DA转换,单片机的IO口可直接复用为AD/DA的通道
16-1.AD模数转换
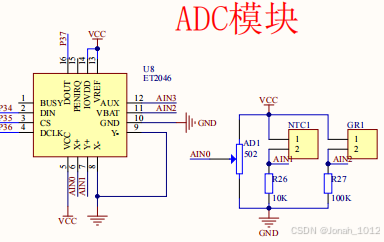
我们先学习AD模块,AD模块主要由XPT2046驱动
XPT2046 是一款常用的电阻式触摸屏控制器芯片,其核心功能是将触摸屏的模拟信号转换为数字信号。
DIN(Data Input)——用于向芯片发送控制命令或配置数据。通过 SPI 协议,DIN 传输包含通道选择、工作模式(如差分/单端)等信息的控制字,指导芯片进行特定操作。
CS(Chip Select,片选)——控制芯片的通信使能。低电平时芯片被激活,开始响应 DIN 的指令;高电平时芯片进入空闲状态,节省功耗并避免总线冲突。
DCLK(Data Clock,时钟)——提供 SPI 通信的同步时钟信号。每个时钟周期传输一位数据,上升沿或下降沿锁存数据(具体取决于 SPI 模式)。时钟频率需符合芯片规格(典型值为几 MHz)。
DOUT(Data Output)——输出转换后的数字信号。在控制字发送完成后,芯片通过 DOUT 以 MSB(最高位优先)方式逐位输出 12 位 ADC 结果,需与 DCLK 同步读取。
一般的工作流程如下:
1.拉低 CS 使能芯片。
2.通过 DIN 发送控制字。
3.在 DCLK 驱动下,芯片完成 ADC 转换。
4.通过 DOUT 读取 12 位转换结果。
5.拉高 CS 结束通信。
由以上内容,我们可以写出XPT2046的模块代码
#include <REGX52.H>
#include <INTRINS.H>
//引脚定义
sbit XPY2046_DIN=P3^4;
sbit XPY2046_CS=P3^5;
sbit XPY2046_DCLK=P3^6;
sbit XPY2046_DOUT=P3^7;
/**
* @brief ZPT2046读取AD值
* @param Command 命令字,范围:头文件内定义的宏,结尾的数字表示转换的位数
* @retval AD转换后的数字量,范围:8位为0~255,12位为0~4095
*/
unsigned int XPT2046_ReadAD(unsigned char Command)
{
unsigned char i;
unsigned int Data=0;
XPY2046_DCLK=0;
XPY2046_CS=0;
for(i=0;i<8;i++)
{
XPY2046_DIN=Command&(0x80>>i);
XPY2046_DCLK=1;
XPY2046_DCLK=0;
}
for(i=0;i<16;i++)
{
XPY2046_DCLK=1;
XPY2046_DCLK=0;
if(XPY2046_DOUT){Data|=(0x8000>>i);}
}
XPY2046_CS=1;
return Data>>8;
}
利用这个AD模块,我们可以读取单片机上可调电阻、热敏电阻、光敏电阻的阻值。
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "XPT2046.h"
unsigned int ADValue;
void main(void)
{
LCD_Init();
LCD_ShowString(1,1,"ADJ NTC GR");
while(1)
{
ADValue=XPT2046_ReadAD(XPT2046_XP); //读取AIN0,可调电阻
LCD_ShowNum(2,1,ADValue,3); //显示AIN0
ADValue=XPT2046_ReadAD(XPT2046_YP); //读取AIN1,热敏电阻
LCD_ShowNum(2,6,ADValue,3); //显示AIN1
ADValue=XPT2046_ReadAD(XPT2046_VBAT); //读取AIN2,光敏电阻
LCD_ShowNum(2,11,ADValue,3); //显示AIN2
Delay(100);
}
}
16-2.DA数模转换
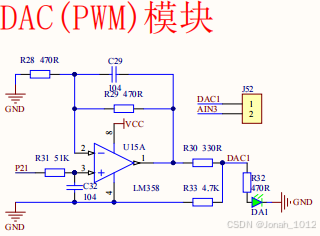
DA数模转换就比较简单了,最基本的应用就是LED呼吸灯。
这里给一个DA数模转换的经典代码,不做过多讲解了
//DA数模转换
#include <REGX52.H>
#include "Delay.h"
#include "Timer0.h"
sbit DA=P2^1;
unsigned char Counter,Compare; //计数值和比较值,用于输出PWM
unsigned char i;
void main()
{
Timer0_Init();
while(1)
{
for(i=0;i<100;i++)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
for(i=100;i>0;i--)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
DA=1; //输出1
}
else //计数值大于比较值
{
DA=0; //输出0
}
}
十七、红外遥控(外部中断)
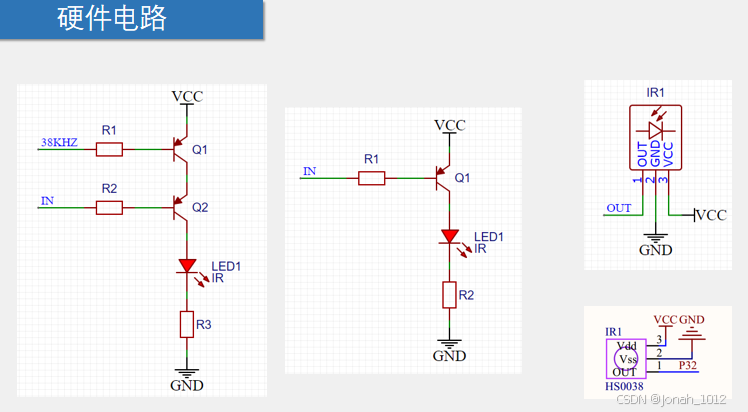
红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出
通信方式:单工,异步
红外LED波长:940nm
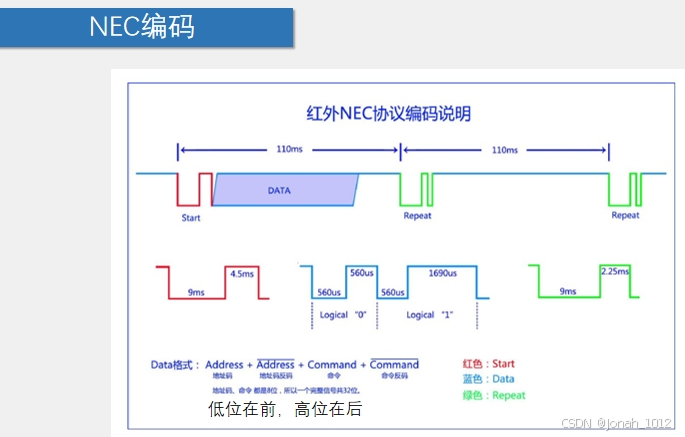
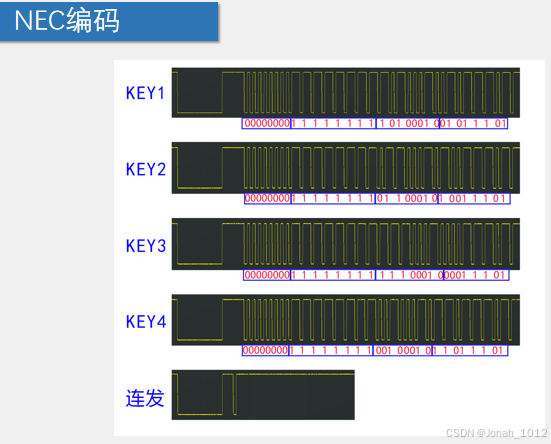
通信协议标准:NEC标准
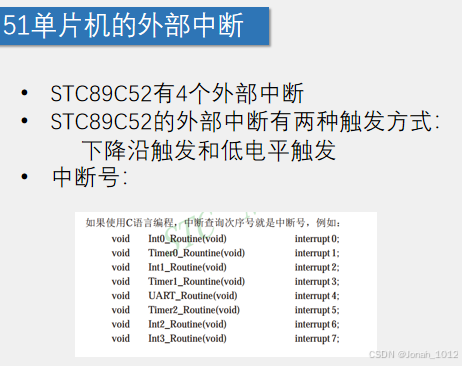
由以上内容我们可以写出外部中断与红外遥控的代码
//外部中断
#include <REGX52.H>
/**
* @brief 外部中断0初始化
* @param 无
* @retval 无
*/
void Int0_Init(void)
{
IT0=1;
IE0=0;
EX0=1;
EA=1;
PX0=1;
}
/*外部中断0中断函数模板
void Int0_Routine(void) interrupt 0
{
}
*/
//红外遥控
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"
unsigned int IR_Time;
unsigned char IR_State;
unsigned char IR_Data[4];
unsigned char IR_pData;
unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;
/**
* @brief 红外遥控初始化
* @param 无
* @retval 无
*/
void IR_Init(void)
{
Timer0_Init();
Int0_Init();
}
/**
* @brief 红外遥控获取收到数据帧标志位
* @param 无
* @retval 是否收到数据帧,1为收到,0为未收到
*/
unsigned char IR_GetDataFlag(void)
{
if(IR_DataFlag)
{
IR_DataFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到连发帧标志位
* @param 无
* @retval 是否收到连发帧,1为收到,0为未收到
*/
unsigned char IR_GetRepeatFlag(void)
{
if(IR_RepeatFlag)
{
IR_RepeatFlag=0;
return 1;
}
return 0;
}
/**
* @brief 红外遥控获取收到的地址数据
* @param 无
* @retval 收到的地址数据
*/
unsigned char IR_GetAddress(void)
{
return IR_Address;
}
/**
* @brief 红外遥控获取收到的命令数据
* @param 无
* @retval 收到的命令数据
*/
unsigned char IR_GetCommand(void)
{
return IR_Command;
}
//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{
if(IR_State==0) //状态0,空闲状态
{
Timer0_SetCounter(0); //定时计数器清0
Timer0_Run(1); //定时器启动
IR_State=1; //置状态为1
}
else if(IR_State==1) //状态1,等待Start信号或Repeat信号
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)
if(IR_Time>13500-500 && IR_Time<13500+500)
{
IR_State=2; //置状态为2
}
//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)
else if(IR_Time>11250-500 && IR_Time<11250+500)
{
IR_RepeatFlag=1; //置收到连发帧标志位为1
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
else //接收出错
{
IR_State=1; //置状态为1
}
}
else if(IR_State==2) //状态2,接收数据
{
IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间
Timer0_SetCounter(0); //定时计数器清0
//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)
if(IR_Time>1120-500 && IR_Time<1120+500)
{
IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0
IR_pData++; //数据位置指针自增
}
//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)
else if(IR_Time>2250-500 && IR_Time<2250+500)
{
IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1
IR_pData++; //数据位置指针自增
}
else //接收出错
{
IR_pData=0; //数据位置指针清0
IR_State=1; //置状态为1
}
if(IR_pData>=32) //如果接收到了32位数据
{
IR_pData=0; //数据位置指针清0
if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证
{
IR_Address=IR_Data[0]; //转存数据
IR_Command=IR_Data[2];
IR_DataFlag=1; //置收到连发帧标志位为1
}
Timer0_Run(0); //定时器停止
IR_State=0; //置状态为0
}
}
}
17-1.红外遥控
由此我们可以设计一个程序,配合LCD1602显示遥控指令
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"
unsigned char Num;
unsigned char Address;
unsigned char Command;
void main()
{
LCD_Init();
LCD_ShowString(1,1,"ADDR CMD NUM");
LCD_ShowString(2,1,"00 00 000");
IR_Init();
while(1)
{
if(IR_GetDataFlag() || IR_GetRepeatFlag()) //如果收到数据帧或者收到连发帧
{
Address=IR_GetAddress(); //获取遥控器地址码
Command=IR_GetCommand(); //获取遥控器命令码
LCD_ShowHexNum(2,1,Address,2); //显示遥控器地址码
LCD_ShowHexNum(2,7,Command,2); //显示遥控器命令码
if(Command==IR_VOL_MINUS) //如果遥控器VOL-按键按下
{
Num--; //Num自减
}
if(Command==IR_VOL_ADD) //如果遥控器VOL+按键按下
{
Num++; //Num自增
}
LCD_ShowNum(2,12,Num,3); //显示Num
}
}
}
17-2.红外遥控电机调速
这里利用定时器1,写一个电机模块代码
#include <REGX52.H>
#include "Timer1.h"
//引脚定义
sbit Motor=P1^0;
unsigned char Counter,Compare;
/**
* @brief 电机初始化
* @param 无
* @retval 无
*/
void Motor_Init(void)
{
Timer1_Init();
}
/**
* @brief 电机设置速度
* @param Speed 要设置的速度,范围0~100
* @retval 无
*/
void Motor_SetSpeed(unsigned char Speed)
{
Compare=Speed;
}
//定时器1中断函数
void Timer1_Routine() interrupt 3
{
TL1 = 0x9C; //设置定时初值
TH1 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
Motor=1; //输出1
}
else //计数值大于比较值
{
Motor=0; //输出0
}
}
代码最终效果是,按下遥控按钮0123,数码管显示对应档位,电机调整至对应档位
#include <REGX52.H>
#include "Delay.h"
#include "Key.h"
#include "Nixie.h"
#include "Motor.h"
#include "IR.h"
unsigned char Command,Speed;
void main()
{
Motor_Init();
IR_Init();
while(1)
{
if(IR_GetDataFlag()) //如果收到数据帧
{
Command=IR_GetCommand(); //获取遥控器命令码
if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度
if(Command==IR_1){Speed=1;}
if(Command==IR_2){Speed=2;}
if(Command==IR_3){Speed=3;}
if(Speed==0){Motor_SetSpeed(0);} //速度输出
if(Speed==1){Motor_SetSpeed(50);}
if(Speed==2){Motor_SetSpeed(75);}
if(Speed==3){Motor_SetSpeed(100);}
}
Nixie(1,Speed); //数码管显示速度
}
}
END
写到这里呢,51单片机的模块学习就告一段落了。
接下来计划做几个实战项目,把我们学习的51单片机知识运用到实际生产生活中去。
/
/
/
/
/
作者是第一次在CSDN上分享学习内容,写的不好请多多包涵。
欢迎大家在评论区和作者讨论。
码字不易,求各位看官点个关注~

















 645
645

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









