







四轮线控转向控制 4WIS CarSim与Simulink联合
控制器为离散LQR控制器
带有完整详细的控制器、二自由度稳定性控制目标推导说明,
MATLAB版本为2018b CarSim版本为2018
YID:8829672061575360
让一部分人先把模型搞起来
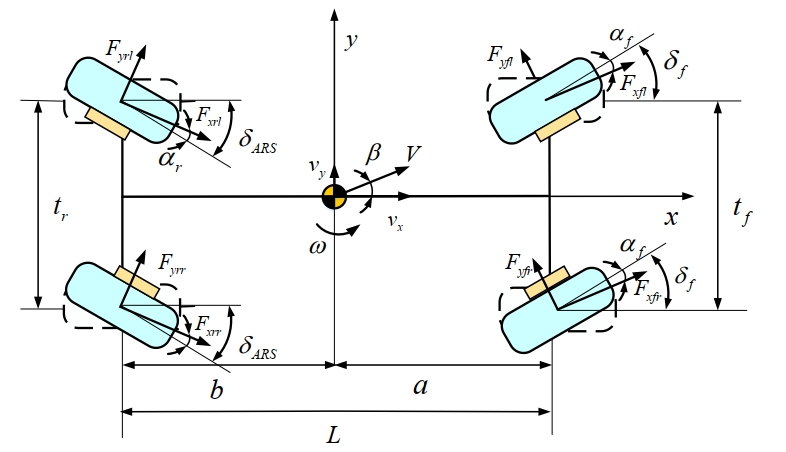
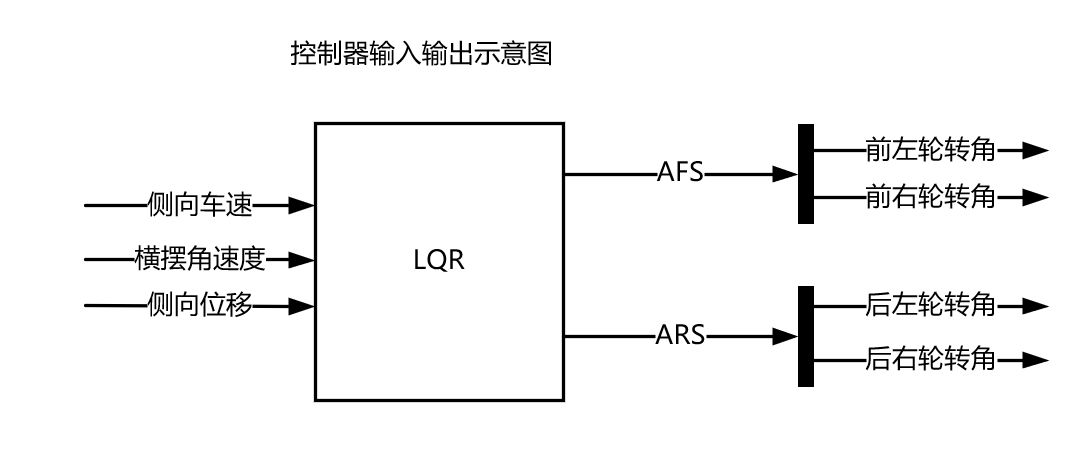
四轮线控转向控制是一项关键的技术,它在汽车行业中扮演着重要的角色。本文将介绍一种新的四轮线控转向控制系统,该系统采用了CarSim与Simulink联合控制器,并采用了离散LQR控制器。同时,本文还将详细说明控制器的设计原理和二自由度稳定性控制目标的推导。
首先,我们需要了解四轮线控转向
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









