







MutexLock
互斥量是线程同步常用的变量,但在实际中一般都是使用封装的函数,这样便于操作。其类图如下:
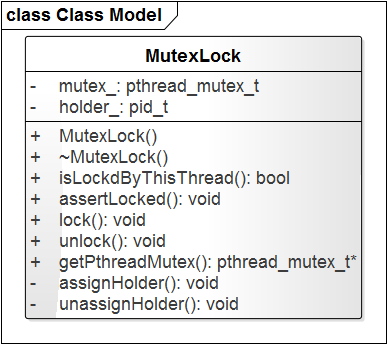
共有两个变量,mutex_是互斥量,holder_是用来表示给互斥量上锁线程的tid。
在构造函数中初始化互斥量mutex_和holder_(0),在析构函数中给销毁mutex_。对我接口根据名字很容易看出用法。
bool isLockByThisThread()是用来检查是否是当前线程给这个MutexLock对象加锁的,原理为比较holder_和 CurrentThread::tid()的值。
assingnHolder和unassignHolder分别在上锁时给holder_赋值,解锁是给holder_置零。assignHolder在上锁后调用,而unassignHolder在解锁前调用。
pthread_mutex_t* getPthreadMutex()可以返回指向类对象中互斥量的指针,在类外对互斥量操作,这个主要用在条件变量中。
在MutexLock中,还有一个类UnassignGuard,这个类中有一个MutexLock对象的引用,在其构造函数调用unassignHolder,析构函数中assignHolder,这个是为条件变量pthread_cond_wait()调用时设计的。在调用pthread_cond_wait()会解锁MuteLock,等待条件(其他线程会给MutexLock上锁)。
MutexLockGuard
在使用mutex时,有时会忘记给mutex解锁,为了防止这种情况发生,常常使用RAII手法。MutexLockGuard就是为此设计的,源码非常简单:
class MutexLockGuard : boost::noncopyable
{
public:
explicit MutexLockGuard(MutexLock& mutex)
: mutex_(mutex)
{
mutex_.lock();
}
~MutexLockGuard()
{
mutex_.unlock();
}
private:
MutexLock& mutex_;
};
内部有一个MutexLock变量的引用,在构造函数初始化,并上锁;在析构函数解锁。
Condition
Condition类封装了条件变量,给出了几个接口,其源码很简单:
class Condition : boost::noncopyable
{
public:
explicit Condition(MutexLock& mutex)
: mutex_(mutex)
{
MCHECK(pthread_cond_init(&pcond_, NULL));//初始化条件变量
}
~Condition()
{
MCHECK(pthread_cond_destroy(&pcond_));//销毁
}
void wait()
{
MutexLock::UnassignGuard ug(mutex_);//这里先给mutex_的holder_置零。在等其析构时会给holder_赋值
MCHECK(pthread_cond_wait(&pcond_, mutex_.getPthreadMutex()));//给mutex_解锁
}
// returns true if time out, false otherwise.
bool waitForSeconds(int seconds);
void notify()
{
MCHECK(pthread_cond_signal(&pcond_));
}
void notifyAll()
{
MCHECK(pthread_cond_broadcast(&pcond_));
}
private:
MutexLock& mutex_;
pthread_cond_t pcond_;
};在这里可以看到MutexLock::UnassignGuard的应用。
pthread_cond_wait(&pcond_, mutex_.getPthreadMutex())会先给mutex_解锁,然后等待条件。这两步是原子操作。在条件成立后,它会给mutex_加锁,然后返回,这两步也是原子操作。
在学了上面三个类后,可以使用封装的库来写生产者消费者模型了。生产者消费者模型可以参考这里。
#include <muduo/base/Mutex.h>
#include <muduo/base/Thread.h>
#include <muduo/base/Condition.h>
#include <boost/bind.hpp>
#include <stdio.h>
using namespace muduo;
struct msg{
struct msg *next;
int num;
};
struct msg *head;
MutexLock mutex;
Condition con(mutex);
void consumer()//消费者
{
struct msg *mp;
for(;;)
{
{
MutexLockGuard lock(mutex);
while(head==NULL)//无货的话,等待生产者生产
con.wait();
mp=head;
head=mp->next;
}
printf("Consume %d\n",mp->num);
free(mp);
sleep(rand()%5);
}
}
void producer()//生产者
{
struct msg *mp;
for(;;){
mp=static_cast<msg*> (malloc(sizeof(struct msg)));
mp->num=rand()%1000+1;
printf("Produce %d\n",mp->num);
{
MutexLockGuard lock(mutex);
mp->next=head;
head=mp;
}
con.notify();
sleep(rand()%5);
}
}
int main(int argc, char **argv)
{
Thread t1(boost::bind(producer), "Producer");
Thread t2(boost::bind(consumer), "Consumer");
t1.start();
t2.start();
t1.join();
t2.join();
return 0;
}CountDownLatch
这个是参考Java的一个同步辅助类,在完成一组正在其他线程中执行的操作之前,它允许一个或多个线程一直等待。
例如一组线程等待一个命令,让命令到来时,这些线程才开始运行。或者一个线程等待多个线程运行结束后才可以运行。
其源码很简单:
class CountDownLatch : boost::noncopyable
{
public:
explicit CountDownLatch(int count);
void wait();
void countDown();
int getCount() const;
private:
mutable MutexLock mutex_;
Condition condition_;
int count_;
};先看私有变量,count_为一个数值,当这个数值为零时,才会通知阻塞在调用wait()的线程。函数void countDown()每次调用都会给count_减1。
以一个例子说明,主线程创建了2个子线程,这两个子线程调用的函数阻塞在wait()上。当主线程调用countDown()后,子线程才运行。
#include <muduo/base/CountDownLatch.h>
#include <muduo/base/Thread.h>
#include <boost/bind.hpp>
#include <vector>
#include <stdio.h>
using namespace muduo;
CountDownLatch latch_(1);
void Function()
{
latch_.wait();//wait for latch_ countDown
printf("Thread ID=%d, Name=%s\n", CurrentThread::tid(), CurrentThread::name());
}
int main()
{
Thread t1(boost::bind(Function), "Thread 1");
Thread t2(boost::bind(Function), "Thread 2");
t1.start();
t2.start();
printf("main thread running, before countDown\n");
latch_.countDown();
sleep(3);//wait for thread t1, t2
printf("main thread running, after countDown\n");
t1.join();
t2.join();
return 0;
}运行结果:
main thread running, before countDown
Thread ID=6994, Name=Thread 2
Thread ID=6993, Name=Thread 1
main thread running, after countDown















 438
438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









