






三维RRT路径规划算法。
RRT、RRT*和双向RRT。
输出时间和路径长度,三种路径规划算法基于matlab
ID:7419716707392275
元朝机灵的枸杞

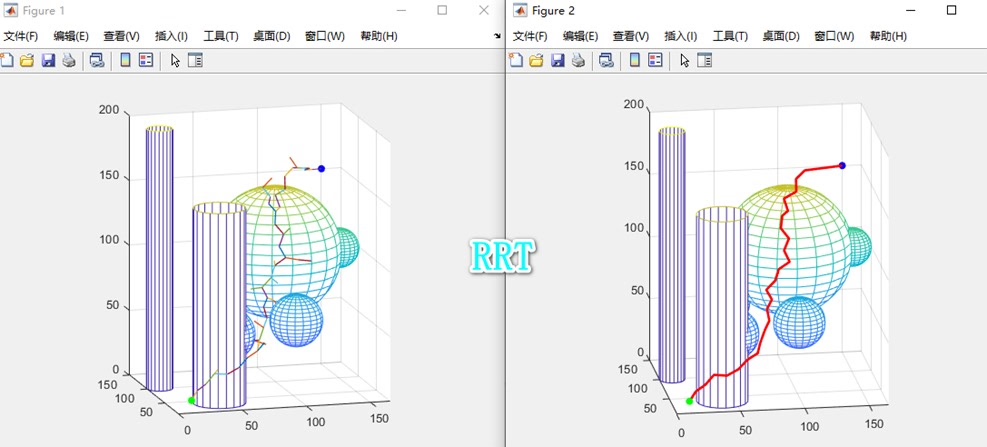
三维RRT路径规划算法是一种常用于解决无人机、机器人等三维空间路径规划问题的方法。本文将重点介绍Rapidly-exploring Random Tree(RRT)算法及其改进版本RRT*和双向RRT在三维环境中的应用。通过使用MATLAB软件,我们可以在三维空间中实现这些算法,并分析它们的输出结果,包括路径规划的时间和路径长度。
首先,我们来介绍RRT算法。RRT是一种基于随机采样的搜索算法,通过在三维空间中随机采样一些节点,然后将这些节点逐步连接起来,构成一棵树。在构建树的过程中,RRT算法会避开障碍物,并且尽量快速地探索整个空间。最终,RRT算法会找到一条由起始点到目标点的路径。
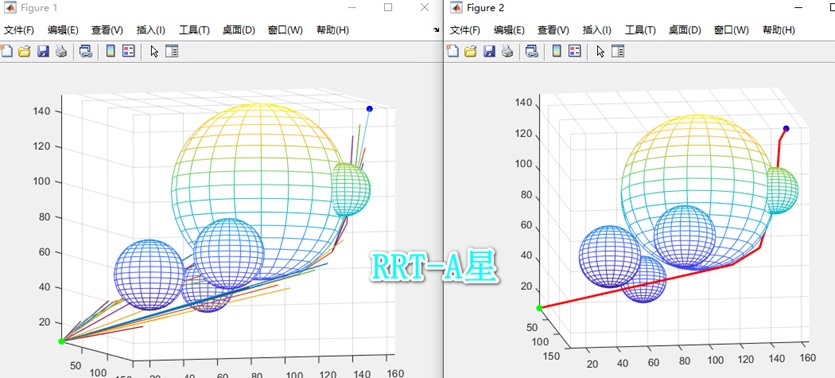
接下来,我们介绍RRT算法。与RRT算法相比,RRT算法是对RRT的改进版本。RRT算法通过重新连接树中的节点,进一步优化路径的质量。具体来说,RRT算法会评估新节点与树中已有节点之间的距离,并选择最近的节点进行连接。通过这种方式,RRT*算法可以得到更优的路径。
最后,我们介绍双向RRT算法。双向RRT算法同时从起始点和目标点出发,分别构建两棵树。这两棵树会在某个节点处相交,然后连接成一棵完整的树。通过使用双向RRT算法,我们可以从起始点和目标点同时进行探索,从而更快地找到一条路径。
在MATLAB中实现这些算法时,我们可以通过使用三维坐标系来表示环境和节点。首先,我们需要定义起始点和目标点的坐标,并设置障碍物的位置和形状。然后,我们可以使用随机采样的方式来生成新的节点,并判断节点是否符合规划要求。如果节点符合规划要求,我们就将其加入到树中,并进行适当的连接操作。最后,我们可以计算路径的时间和长度,并将结果输出。
通过对这三种路径规划算法的分析和比较,我们可以得出它们在三维空间中的优缺点。RRT算法简单易实现,但路径质量可能较差;RRT*算法在路径质量上有较大改进,但计算复杂度可能较高;双向RRT算法可以更快地找到路径,但在某些情况下可能遇到困难。
总之,三维RRT路径规划算法在无人机、机器人等领域具有广泛的应用前景。通过使用MATLAB软件,我们可以实现这些算法,并分析它们的输出结果,包括路径规划的时间和路径长度。未来的研究可以进一步优化这些算法,使其更适用于复杂的三维环境,并提高路径的质量和计算效率。
通过本文的介绍,读者可以深入了解三维RRT路径规划算法的原理和应用,并在实际项目中灵活运用。希望本文对读者在三维路径规划领域的研究和实践有所帮助,进一步推动技术的发展和应用。
【相关代码,程序地址】:http://fansik.cn/716707392275.html
















 998
998











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









