






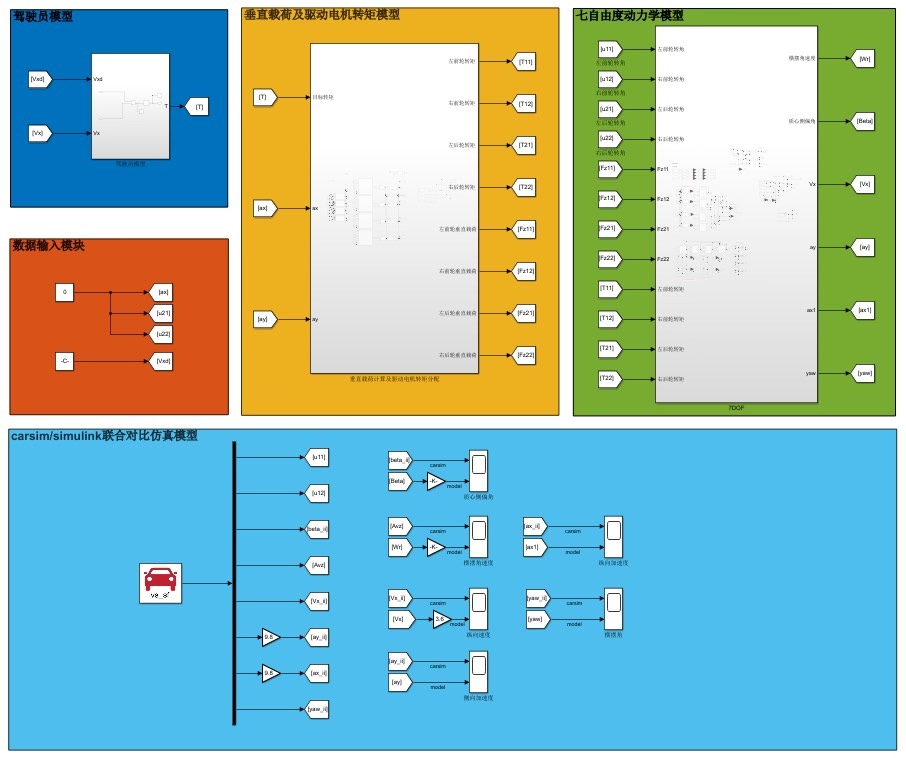
分布式驱动电动汽车七自由度动力学模型,主要包括车辆纵向、横向、横摆以及四个车轮的转动等7个自由度。
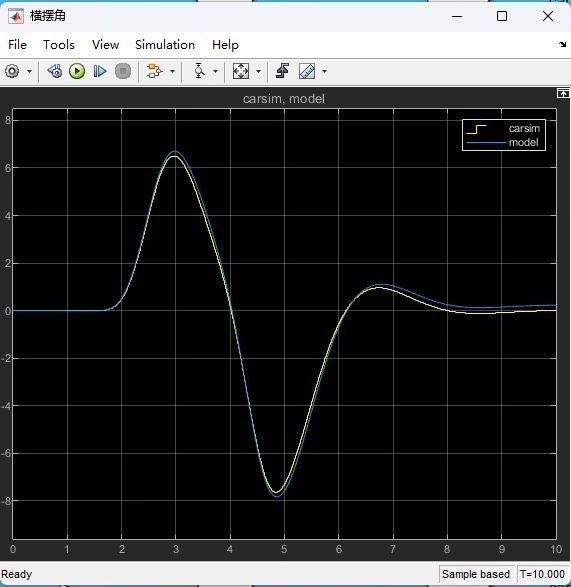
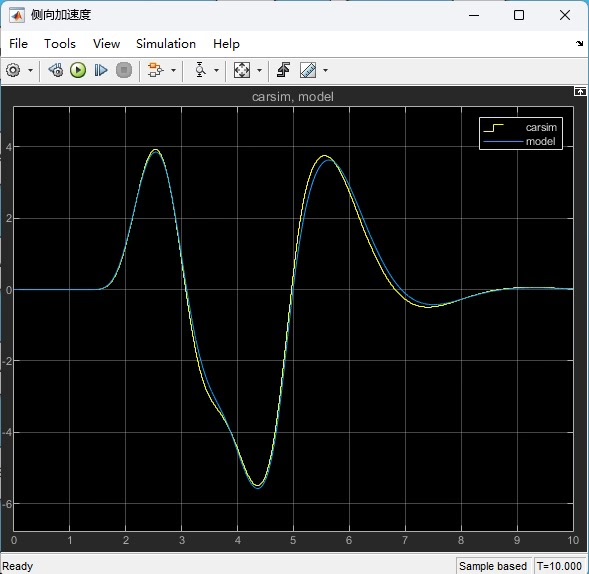
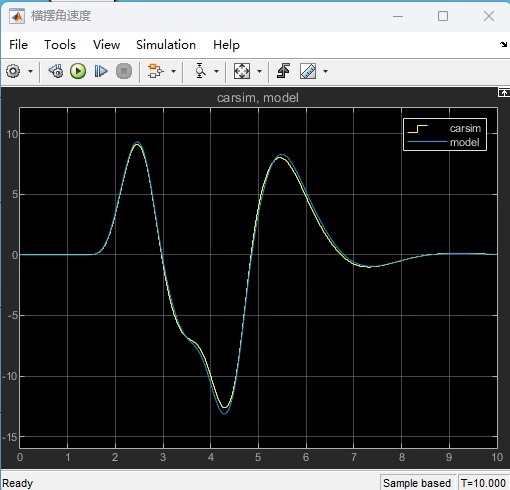
使用Carsim和Simulink联合仿真验证7自由度动力学模型,carsim输出变量包括:前轮转角和质心侧偏角等参数对比,行驶工况采用的是双移线。
carsim和simulink模型也可以分开分别运行进行验证。
文件包括:simulink模型版本2018b和carsim2019版本cpar文件,以及参考文献,到手即能运行。
ID:51200716730906892
GOBN

分布式驱动电动汽车是一种具有高度智能化和环境友好型的交通工具,其动力学模型对于车辆控制和仿真分析具有重要意义。本文将介绍一种基于七自由度动力学模型的分布式驱动电动汽车模拟验证方法,通过Carsim和Simulink的联合仿真,实现对模型的准确性和可行性进行评估。
在分布式驱动电动汽车的七自由度动力学模型中,主要包括车辆纵向、横向、横摆以及四个车轮的转动等7个自由度。这种模型能够全面描述车辆在不同行驶工况下的运动状态,为车辆控制系统的设计和优化提供了重要依据。
为了验证七自由度动力学模型的准确性,本文采用了Carsim和Simulink联合仿真的方法。Carsim是一款专业的车辆动力学仿真软件,能够准确模拟车辆在各种路况下的运动特性。Simulink是一款常用的系统级仿真软件,可以方便地建立车辆控制系统仿真模型。
在联合仿真过程中,我们主要关注Carsim输出变量中的前轮转角和质心侧偏角等参数。这些参数可以直接反映出车辆的操控性能和稳定性。通过将Carsim和Simulink进行耦合,可以实现两个软件的数据交互和模型同步运行。通过对比模型输出和实际测试结果,可以评估七自由度动力学模型的准确性和可靠性。
在行驶工况的选择上,我们采用了双移线模式。这种模式下,车辆在不同速度和曲率的道路上进行行驶,可以全面考察车辆在各种工况下的动态响应和控制性能。通过对比模型输出和实际测试数据,可以验证七自由度动力学模型在不同行驶工况下的适用性。
为了方便读者进行验证和仿真,本文附带了Simulink模型版本2018b和Carsim 2019版本cpar文件。读者可以直接导入这些文件,进行仿真和验证。此外,我们还提供了参考文献,以供读者深入学习和研究。
总之,本文介绍了一种基于七自由度动力学模型的分布式驱动电动汽车模拟验证方法。通过Carsim和Simulink的联合仿真,可以评估模型的准确性和可行性。我们提供了Simulink模型和Carsim文件,并附带了参考文献,读者可以直接进行验证和仿真。希望本文对于分布式驱动电动汽车的研究和开发有所帮助。
【相关代码,程序地址】:http://fansik.cn/716730906892.html


















 2017
2017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









