






 本文详细介绍了滑模控制在永磁电机、永磁同步电机、四旋翼无人机以及开关磁阻电机等领域的应用,涵盖观测器设计、滑膜控制方法、控制器实现和MATLAB仿真。通过实例展示滑模控制的优势和性能,以及未来研究方向。
本文详细介绍了滑模控制在永磁电机、永磁同步电机、四旋翼无人机以及开关磁阻电机等领域的应用,涵盖观测器设计、滑膜控制方法、控制器实现和MATLAB仿真。通过实例展示滑模控制的优势和性能,以及未来研究方向。
滑模相关(是一个大文件夹)
1.永磁电机的滑模观测器Simulink模型
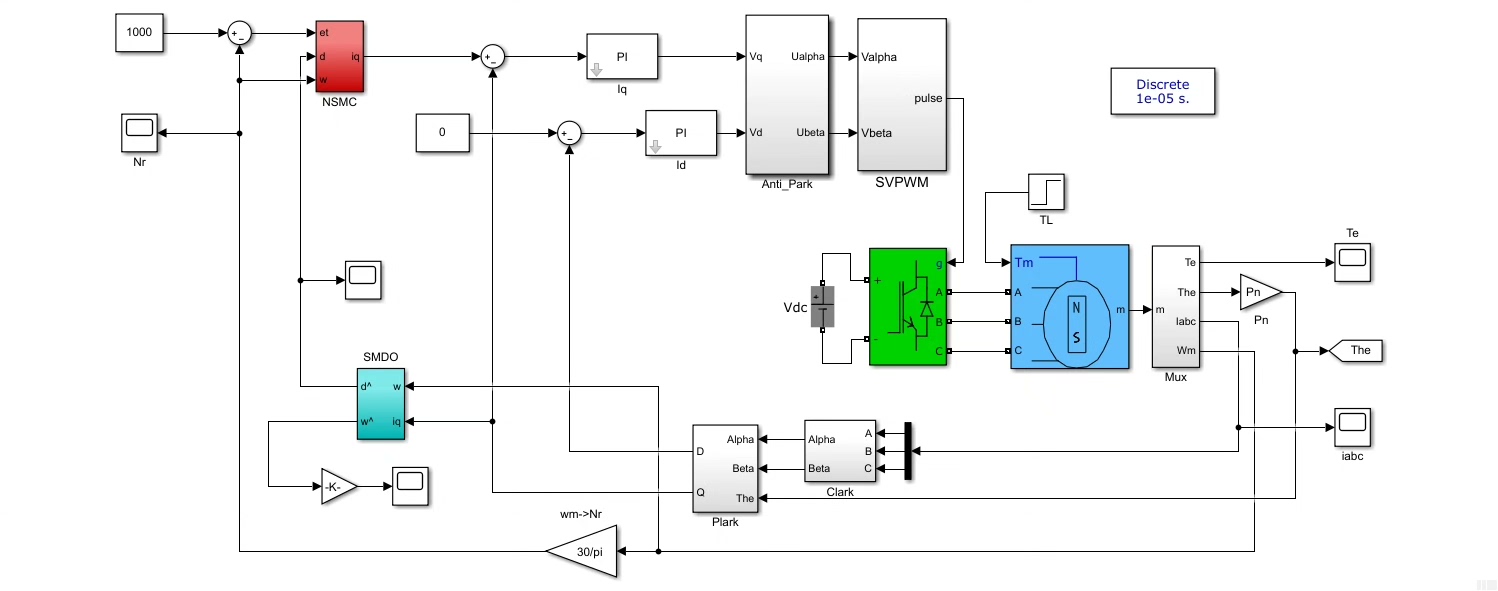
2.永磁同步电机趋近律滑膜控制NSMC
3.MATLAB四旋翼仿真滑模控制 simulink
5.传统滑模控制器设计
6.分散滑模负载频率控制的MATLAB 仿真
滑模控制
7.超螺旋滑模控制器
8.基于模糊滑模控制的开关磁阻电机控制模型
9.Matlab Simulin...使用不同控制算法(LQR、滑模控制器、积分器反步控制器)的姿态确定和控制系统仿真。
10.无感FOC滑膜观测器算法采用滑膜观测器启动采用Vfc代码原理图
11.无刷滑膜Slide Mode Obsever
12.永磁同步电机smo滑膜观测算法带文档
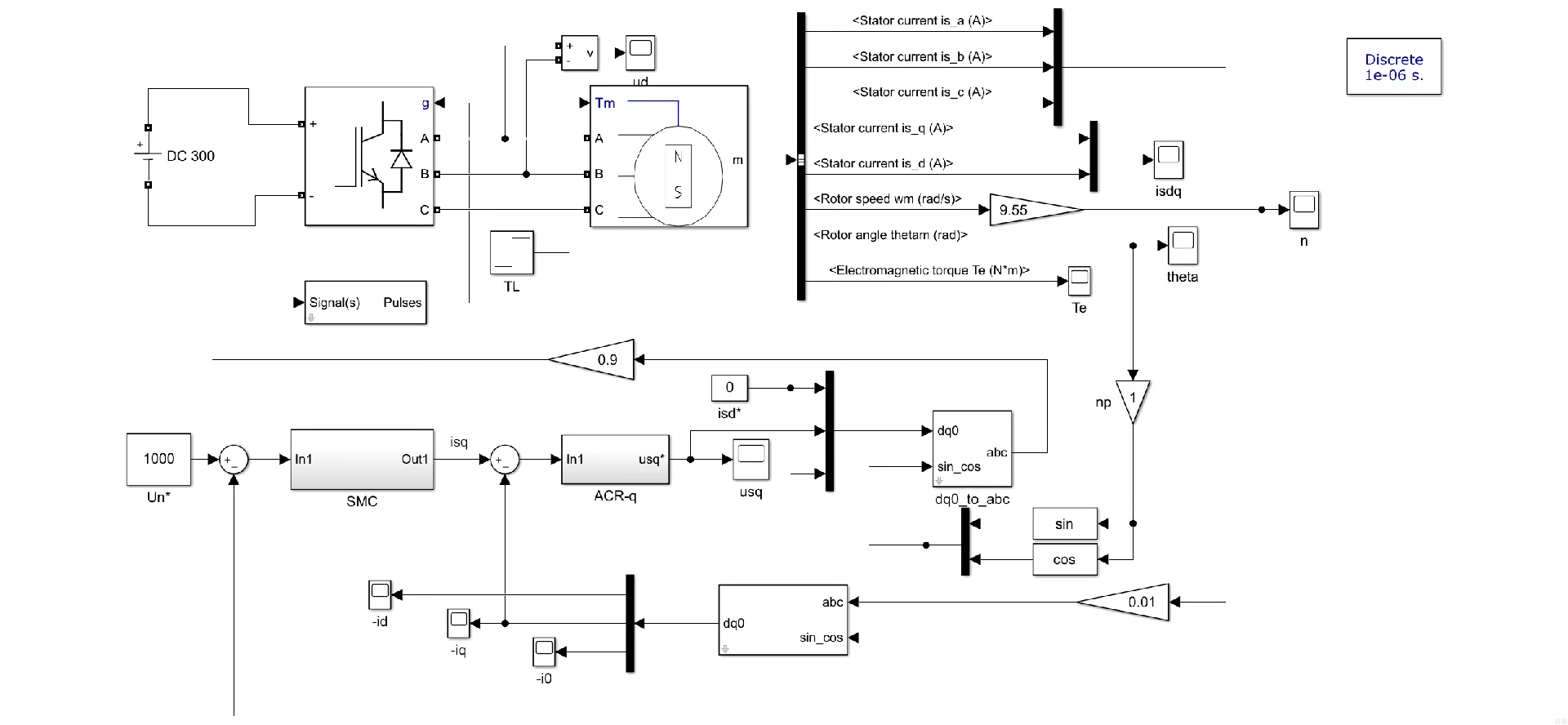
13.永磁同步电机滑模控制Simulink仿真模型
14.永磁同步电机滑膜变结构无速度传感器控制Simulink仿真模型
15.永磁同步直线电机PMLSM矢量控制滑模控制SVPWM仿真模型
ID:7730736052325388
茄皮紫的三敛
滑模控制是一种常见的控制方法,在多个电机控制领域中都有广泛的应用。本文将围绕滑模控制展开讨论,主要包括永磁电机的滑模观测器、滑膜控制、传统滑模控制器设计等主题。
首先,我们将介绍永磁电机的滑模观测器Simulink模型。滑模观测器是一种常用的观测器设计方法,通过观测系统状态和输出误差,实现对系统状态的估计。在Simulink中,我们可以建立永磁电机的模型,并通过滑模观测器来实现状态的估计,从而实现对永磁电机的控制。
其次,我们将探讨永磁同步电机趋近律滑膜控制NSMC。趋近律滑膜控制是一种改进的滑模控制方法,通过引入趋近律技术,可以使系统无限接近滑模面。我们将详细介绍NSMC的原理和实现方法,并通过MATLAB仿真来验证其性能。
另外,我们还将讨论MATLAB四旋翼仿真滑模控制。四旋翼无人机是近年来越来越受欢迎的飞行器,其控制方法也是一个研究热点。通过Simulink中的滑模控制模型,我们可以进行四旋翼的姿态确定和控制系统仿真,比较不同控制算法(LQR、滑模控制器、积分器反步控制器)的性能差异。
此外,我们还将介绍分散滑模负载频率控制的MATLAB仿真。滑模控制在负载频率控制中也有广泛应用,通过分散滑模负载频率控制的MATLAB仿真,我们可以验证其控制性能及稳定性,进一步完善滑模控制的应用。
还有,我们将关注超螺旋滑模控制器和基于模糊滑模控制的开关磁阻电机控制模型。超螺旋滑模控制器是一种改进的滑模控制方法,可以提高系统的响应速度和鲁棒性。而基于模糊滑模控制的开关磁阻电机控制模型则结合了模糊控制和滑模控制的优点,实现对开关磁阻电机的精确控制。
最后,我们将介绍永磁同步电机滑模控制Simulink仿真模型。永磁同步电机是一种常用的电机类型,滑模控制方法在其控制中也有广泛应用。通过Simulink的仿真模型,我们可以实现永磁同步电机的滑模控制,并验证其控制性能。
综上所述,本文围绕滑模控制展开讨论,介绍了多个与滑模控制相关的主题,包括永磁电机的滑模观测器、滑膜控制、传统滑模控制器设计等。通过详细的分析和仿真实验,我们展示了滑模控制在不同电机控制领域中的应用,并验证了其控制性能和稳定性。
在未来的研究中,我们可以进一步探索滑模控制在其他电机控制领域的应用,并与其他控制方法进行比较,以提高滑模控制的性能和适用范围。同时,我们还可以结合实际工程应用,对滑模控制进行进一步优化和改进,实现更准确、稳定的电机控制。
总之,滑模控制作为一种重要的控制方法,在电机控制领域中有着广泛的应用。通过本文的讨论和分析,我们希望读者能够对滑模控制有更深入的理解,并在实际应用中发挥出其优势和潜力。
相关代码 程序地址:http://nodep.cn/736052325388.html















 966
966











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









