






本次给大家带来一篇SCI论文的全文翻译!该论文利用街景影像调查道路景观特征与交通事故在细化的路段层面的关系。该论文的研究结果为制定有效的规划策略来提升交通安全提供了新的见解!
【论文题目】
Uncovering the association between traffic crashes and street-level built-environment features using street view images
【题目翻译】
利用街景影像分析揭示交通事故与街道级建成环境特征之间的关系
【期刊信息】
International Journal of Geographical Information Science;2023, VOL. 37, NO. 11, 2367–2391
【作者信息】
- Xinyue Ye, 德州农工大学, 美国
- Sheng Hu,华南师范大学北斗研究院工学院;
- Hanfa Xing,华南师范大学北斗研究院工学院;
- Wei Luo,新加坡国立大学地理系GeoSpatialX实验室;
- Liang Wu(通讯作者),中国地质大学(武汉)计算机科学学院,wuliang@cug.edu.cn等。
【论文链接】
https://doi.org/10.1080/13658816.2023.2254362
【关键词】
交通事故、街景图像、街景特征、地理加权泊松回归
【本文亮点】
- 为未来快速的城市交通提出前瞻性的城市规划解决方案无
- 将城市结构研究从过去/现在的维度推进到未来的维度。
- 构建具有较强地理和时间泛化能力的流量预测模型。
- 预测未来几年大型城市群的流动模式。
- 主要城市群的城市网络将更加公平、减少集中化。
【摘要】
研究建成环境因素与道路安全之间的关系对防止交通事故至关重要。尽管已有研究基于预先确定的分区单元分析了与交通相关的建成环境因素,但关于街景特征与交通事故之间关系的确凿证据仍然缺乏。随着街景影像的大规模普及,现在可以实现对城市建成环境的大规模自动化分析。因此,本研究旨在利用街景影像调查道路景观特征与交通事故在细化的路段层面的关系。具体来说,我们采用语义图像分割技术从城市街景影像中提取道路景观要素,然后在路段层面创建与交通事故相关的变量,包括街道级别的建成环境变量、交通变量、土地利用指数及其相邻特征。最后,我们采用"分类再回归"策略建模交通事故数量,同时考虑了零膨胀和空间异质性的问题。研究结果表明,道路景观特征可以有效反映细化路段层面的建成环境特征。此外,通过比较我们提出的模型方法与现有模型,结果显示其具有显著优越的性能。我们的研究结果为制定有效的规划策略来提升交通安全提供了新的见解。
【引言】
在城市区域内探索与道路交通安全相关的潜在特征,一直是交通安全研究中的长期问题,已经引起交通工程师、政府官员、安全专家和城市规划师的日益关注(Aarts and van Schagen 2006; Abdel-Aty et al. 2013; Chen and Shen 2019)。例如,多国安全倡议,如《零事故愿景》(Elvebakk 2007)、《欧洲单一运输区路线图》(World Health Organization 2020)以及《2021-2030年道路安全行动十年》(World Health Organization 2020)已被实施,旨在探索与各种城市场所相关的交通风险变化。许多研究者试图评估事故频率与建成环境配置之间的联系,以识别显著的事故预测因素 (Ewing and Dumbaugh 2009; Merlin et al. 2020)。一些重要的建成环境特征,如行驶里程 (Tasic et al. 2016)、人口(Wang et al. 2019)、目的地的可达性(Ewing and Cervero 2010) 以及土地使用特征(Pulugurtha et al. 2013)已在许多研究中被讨论。
相关研究验证了交通安全与各种建成环境和社会经济因素在宏观层面的基本联系,以及建成环境对人类行为的影响。研究者采用了各种预定的区域分析单元,如方格网(Asadi et al. 2022)、人口普查小区 (Zhang et al. 2015)、交通小区来调查安全研究中的局部异质影响(Obelheiroet al. 2020)。然而,关于街道层面等细粒度尺度上的事故频率的证据仍未被深入研究。
在大都市区域,街道在道路网络中连接各种城市功能区域。同时,道路网络限制了人类的活动和旅行行为(Shen and Karimi 2016)。忽视街道层面的建成环境因素导致了相关研究的不足,例如准确识别重要的事故预测因素(Loo and Yao 2013; Ulak et al. 2019)。街道单元是区域或分区单元的有前景替代方案,可以提供街景特征等细粒度的知识(Zhu et al. 2017)。此外,使用预定的区域或分区方案,如宏观交通分析单元,可能导致偏见和错误的统计推断。此外,可修改区域单元问题(MAUP)在一定程度上限制了分析规模(Zhu et al. 2017; Obelheiro et al. 2020).。
在过去十年中,众包和地图服务的迅速增长大大提高了收集大量地理标记多媒体数据的能力,例如街景图片(Liu et al. 2020)。街景图像提供了步行者视角的现实世界风景,包括人造和自然景观,成为在精细的街道层级下评估不同建成环境的潜在数据(Kang et al. 2020; Verma et al. 2020; Sun et al. 2022)。最先进的机器学习技术,特别是计算机视觉中应用图像分割算法的成功使用(Ibrahim et al. 2020; Minaee et al. 2022),使研究人员能够利用街景图像客观且定量地探索精细化的建成环境特征。
最近的研究表明,使用街景图像数据有很多优势,例如衡量大都市地区的人类主观视角(Qiu et al. 2022)、合成位置语义(Egli et al. 2019; Kang et al. 2020)、调查公共健康问题(Egli et al. 2019; Kang et al. 2020)以及估计城市犯罪和安全((Zhang et al. 2020; Luo et al. 2022)。然而,很少有研究专注于使用街景图像评估建成环境对交通事故的影响。在这一语境中,街景图像能提供全新且未被大量探索的可能性,以精细的街道尺度评估交通安全与城市建成环境之间的联系。
本研究提出了一种方法框架,用于评估街景建成环境与道路安全之间的关系,特别关注于更精细的道路段级别。具体而言,本研究的焦点包括以下两个主要研究问题:
1.街景图像中的街道级建成环境特征如何帮助预测交通事故?如何通过改进模型提高预测性能?
2.考虑到与交通安全相关,哪些建成环境的特征与交通事故频率有显著相关性?
这些问题的答案,如《城市视觉智能》(Fan et al. 2023; Xu et al. 2022)中所述,将有助于增进对城市视觉方面作用的理解。此外,本研究的结果也丰富了基于位置的地理信息系统(GIS)研究,并为交通规划和更安全的出行应用提供了精细化的视角。本研究提出的道路安全评估框架可以为城市的地理空间分析提供实证证据,并为制定有效的规划策略提供新的见解。
【文献综述】
2.1 建成环境与交通安全
了解影响城区交通事故的重要因素是交通安全与防范事故的一个关键主题。目前文献共识认为,建成环境中的因素可能促成或阻碍交通安全问题(Aarts and van Schagen 2006; Ewing and Cervero 2010)。建成环境可以分为基于土地的特征和基于街道的特征(Merlin et al. 2020)。土地的位置、布局、混合用地以及建筑物相对于道路的设计,是建成环境中基于土地特征的例子。街道的布局、周边街景、交叉口和街道网络是建成环境中基于街道特征的例子。
交通安全的结果可以通过交通事故数量或交通相关的死亡和伤害来衡量。描述建成环境的各种变量及其对交通安全的影响已在文献中广泛讨论。例如,交通和交通特征,即行车里程(VMT)、道路长度、交叉口和驾驶速度,是相当概念性和实践性的指标,因为这些特征与交通安全密切相关(Hadayeghi et al. 2006; Huang et al. 2016; Tasic et al. 2016)。社会经济和人口统计指标同样或更重要地衡量了评估交通安全暴露的指标。在人口较多的地方,交通事故更有可能发生(Kim et al. 2006; Wang et al. 2019)。此外,土地使用模式是交通事故的关键因素。根据Pulugurtha等人(2013)的研究,商业和机构区域比住宅区更容易发生交通事故。Saha等人(2020)认为,土地使用模式影响不同城市功能区居民的行为,从而增加或减少交通事故的数量。
2.2 事故预测模型
许多研究已试图预测交通事故的数量。事故预测模型(CPM)广泛用于交通安全评估和城市空间建模。在最初的研究阶段,鉴于事故数量和偏度,已有研究表明全局模型的优势,例如用泊松模型的多种变体(Chiou and Fu 2013)和负二项模型(Ladron de Guevara et al. 2004)预测事故频率。然而,在全局模型中,依赖变量和独立变量被假定在整个研究区域内保持一致;也就是说,模型参数不会因地点的不同而改变。在缺乏地理异质性的情况下,全局模型中变量间固定联系的假设可能不太合理(De Marsily et al. 2005; Anselin 2010)。
地理加权泊松回归(GWPR)方法扩展了传统的全局模型,允许参数在地理上的局部变化。这有助于学者理解变量间的联系如何随空间变化而变化,从而使得结果更易于解释(Fotheringham et al. 2017)。在这一背景下,已经进行了许多用GWPR模型预测交通事故数量的深入研究((Hadayeghi et al. 2010; Li et al. 2013; Al-Hasani et al. 2021; Soroori et al. 2021)。然而,上述方法均不适用于同时解决空间非平稳性和零膨胀问题(Obelheiro et al. 2020),因此需要开发一种新的预测策略。
2.3 交通安全与街景建成环境关系的相关研究
探讨建成环境和道路安全之间的关联是城市研究和规划中长期存在的问题之一。在交通安全基础设施上的投资可能是一种特别具有成本效益的方式,可减少交通相关的发病率和死亡率,并改善人口健康。例如,许多像纽约市这样的大城市已经制定了引人注目的计划,安装交通信号灯,并对数十条道路和交叉路口进行重新设计。最近的研究表明,改善照明、增设减速带或保持道路及街景建成环境中的路面标记可以显著提高行人安全(Tester et al. 2004; Retting et al. 2003);然而,这些发现并未被广泛复制(Mooney et al. 2016)。
以前的研究是通过实地调查的环境审计来评估社区级的交通事故(Hanson et al. 2013; Mooney et al. 2016; Cai et al. 2022)。这种方法涉及定义各种指标以提供事故发生频率的定性解释。Obelheiro 等人(2020)研究了道路网络特征与新开发交通安全区域内事故数量之间的关系。他们检查了交叉点类型的密度、交通信号以及不同道路类型的比例,作为道路网络和基础设施设计的指标。然而,传统的环境审计方法因为时间和人力资源的高成本,难以有效量化具有空间异质性的交通相关变量。
最近,多学科的工作集中于正式地表示建成环境和物质空间,强调了城市空间模式与人类活动之间的联系(Luo and MacEachren 2014; Ibrahim et al. 2020)。在大型城市地区使用面访和问卷调查等调查方式一直面临挑战(Luo et al. 2019; Martin and Schuurman 2020)。然而,街景图像展现了在大规模和自动化城市建成环境感知方面的巨大潜力(Middel et al. 2019; Qiao and Yuan 2021)。例如,Qiu等人(2022)利用街景图像通过提取30个街景要素来预测房价。此外,Fang等人(2021)探索了通过街景图像和土地地块映射土地利用和复杂地理空间关系的潜力。而且,Egli 等人(2019)使用谷歌地图探索了不健康食品和饮料广告与儿童肥胖的联系。鉴于分析与交通相关的建成环境特征在减少交通事故和相关伤害中的重要性,街景图像兼具实际性和概念性的意义。尽管取得了显著进展,但利用街景图像评估交通相关风险的潜力尚未被充分挖掘。
2.4 对现有研究的批判性分析
通过全面回顾现有文献,可以识别出三个必须得到充分解决的关键问题。第一,交通安全政策和研究主要集中在基础设施、车辆安全标准和道路使用者行为上;而从街景图像派生的建成环境因素尚未得到充分探索。第二,现有研究采用了邮政编码级别的地理单元或数平方公里的网格来预测交通安全。然而,此类研究显示,即使在同一社区内(Castro and De Santos-Berbel 2015; Rui et al. 2016),从不同街道的交通事故率也存在显著差异。这种差异强调了在街道级别分析事故率的重要性,特别是在为用户设计基于安全的路网系统时。第三,空间非平稳性和零膨胀问题在事故预测模型中尚未得到同时考虑。
【研究区域及数据】
3.1 研究区域
研究区域为香港特别行政区的九龙半岛(47平方公里),包括五个行政区域:九龙城、观塘、深水埗、黄大仙及油尖旺(见图1)。九龙半岛东面及西面是人口密集的工业区;北面是住宅区,南面是商业区。根据2021年香港人口普查(政府统计处2021),九龙半岛人口占香港人口的30.1%。此外,这个研究区域充满了外观各异的多条街道,是香港交通事故频发的地区之一(香港警务处 2021)。

图1.研究范围-九龙半岛。左上角的图片显示九龙半岛在香港特别行政区的位置。右边的图片是采样点的街景图片。
3.2数据集
本研究的主要数据包括交通事故统计数据和街景图像数据。交通事故统计数据源自2020年香港特别行政区运输部的官方记录。原始数据中,从2017年到2019年共发生了13,458起交通事故,包括7,192起车与车相撞事故(VCV),2,845起车与行人相撞事故(VCP)以及3,421起单一车辆事故(SVC)。这些记录包含了事故的基本空间信息(例如纬度和经度)以及附加的属性信息,如事故的日期、时间和严重程度。表1列出了原始交通事故统计数据的统计摘要。统计数据显示,从2017年到2019年交通事故总数略有变化。其中,最常见的事故类型为车与车相撞(VCV)事故,其次是单一车辆事故(SVC)和车与行人相撞(VCP)事故。因此,分别将VCV、VCP和SVC事故发生的频率作为独立变量,用于研究交通事故的不同影响因素。图2比较了具有零事故和非零事故的路段。
表1. 研究区域内交通事故类型及其统计

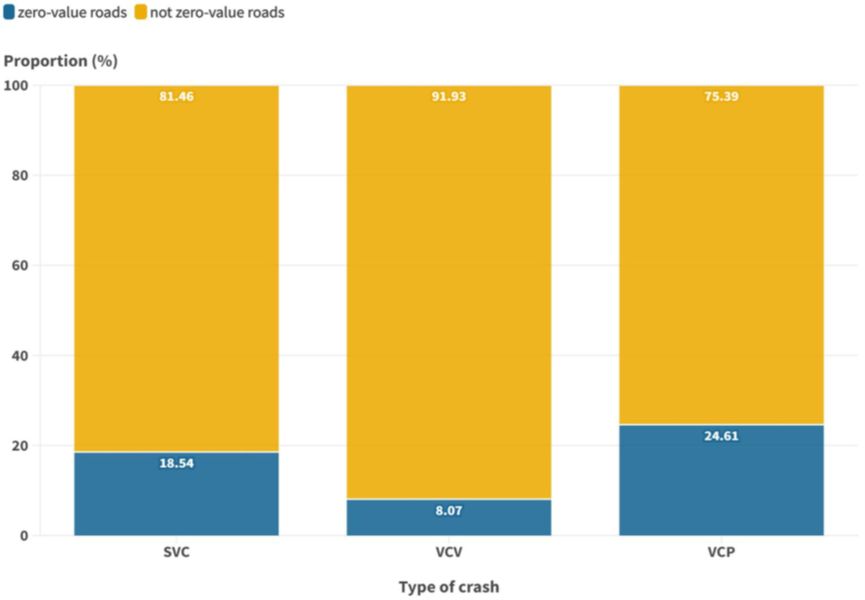
图2. 零事故和非零事故路段的比较。y轴表示不同路段的数量百分比。
街景图像是通过腾讯地图这一中国领先的地图服务提供商的公共应用程序接口(API)获取的。在图像收集过程中,采样位置是沿着道路网络以100米为间隔选取的。为了展示周围的街景,每个采样位置都采用了不同的摄像机方向(例如0°、90°、180°和270°)获取街景图像。图1展示了在一个采样位置从四个不同视角拍摄的街景图像的示例。不同视角的图像展示了包括树木、建筑物、混凝土道路和天空在内的街景要素。大约收集了29,900张街景图像,覆盖了7,482个采样位置。
城市道路网络和兴趣点(POIs)数据等支撑数据是在2019年7月从OpenStreetMap(OSM)中获取的。OSM中的道路网络涵盖了研究区域内的主干道、次干道、居住区道路及其他可驾驶道路。为了简化实验分析,保留了单向道路,忽略了附有错误信息的道路,并提取了双向道路的中心线替代复杂的双向道路。在预处理后,从研究区域中提取了2,004个道路网络边缘。此外,收集了3,459个兴趣点数据作为辅助信息,以反映土地使用特性。原始的POIs数据中包括了名称、纬度、经度和类别等基本信息。
【研究方法】
4.1 基于语义图像分割的街景要素提取
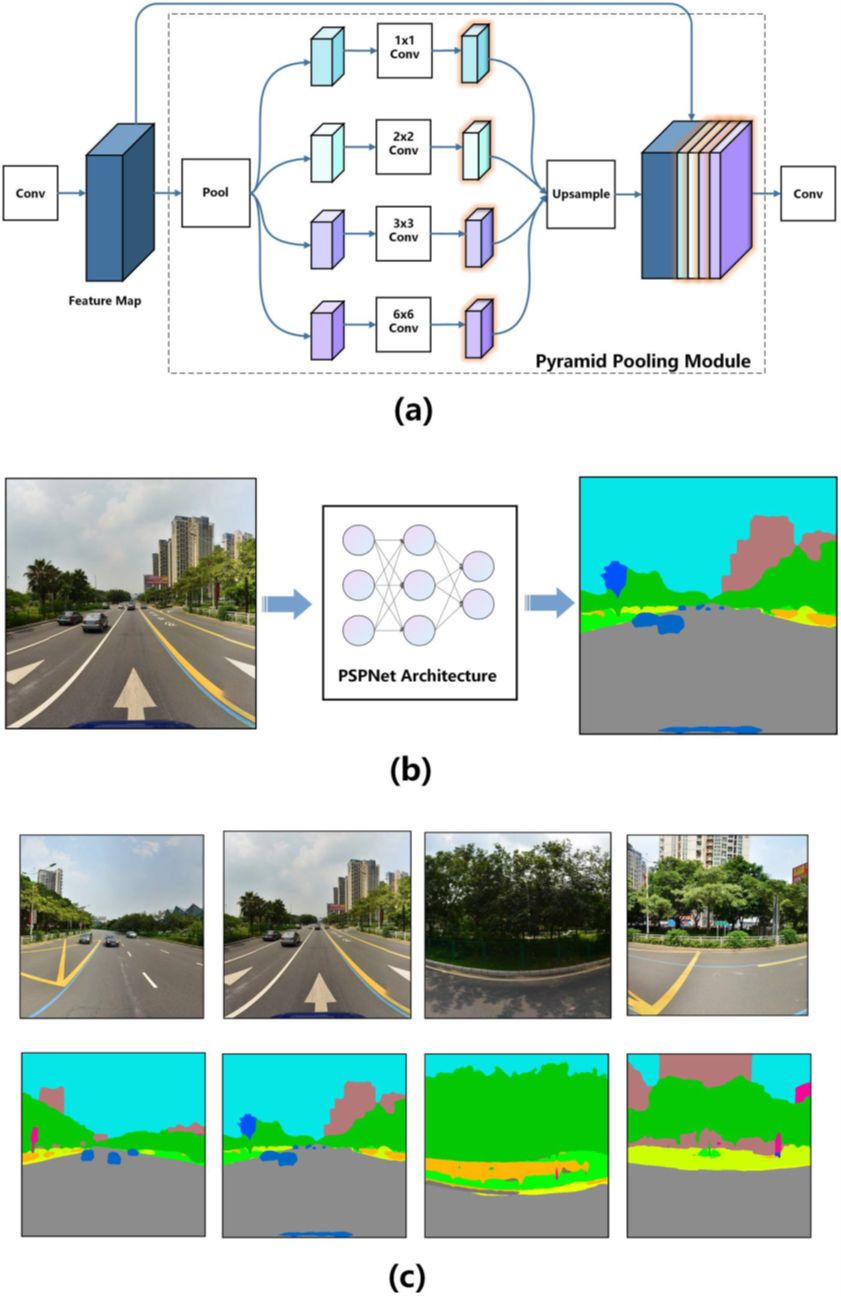
在本研究中,进行了语义图像分割,以从街景图像中获取街景要素。语义图像分割为街景图像的每个像素分配一个类别(如像素级预测)表征其特征(如街景要素)本研究采用了金字塔场景解析网络(PSPNet)(Zhao et al. 2017),这是一种具有卓越分割精度表现的最新深度神经网络。PSPNet 使用一个金字塔解析模块,通过基于不同区域的上下文聚合来利用全局上下文信息。由于其在图像上下文聚合和可靠预测精度方面的强大能力,PSPNet 已在多个领域频繁应用于通过街景图像自动提取语义信息(Zhang et al. 2018; Helbich et al. 2019; Xia et al. 2021)。
原始的PSPNet 模型使用 ADE20K 数据集进行训练,并在分类 150 个语义对象类别时,实现了79.7% 的像素级预测精度(Zhou et al. 2019)。在那一研究中,介绍并微调了原始的 PSPNet 框架,使用随机选取的1000 张香港街景图像进行训练,预测精度为 78%。为了简化分析,本研究考虑了九个与街景要素密切相关的语义对象类别,包括道路、建筑、树木、天空、人行道、汽车、墙壁、围栏和植物。图 3 展示了使用 PSPNet 模型从街景图像中提取街景要素的过程。
4.2 创建交通事故相关变量
在这项研究中,包括因变量和自变量在内的交通事故相关变量是在道路路段级别创建的。首先提取了道路的中心线,并从研究区域获取了简化的道路网络。然后为每条道路创建了地理缓冲区,以便空间连接交通事故相关变量;缓冲区的大小为100米。变量的详细信息将在以下部分进行描述。
4.2.1交通事故加权数
交通事故的数量被用作因变量。某一道路段缓冲区内的事故数量被用作交通事故强度的代理变量。考虑到道路长度的影响(通常,较长的道路与更多的交通事故相关联),使用道路长度来规范化交通事故数量。使用三种交通事故类型,即VCV、VCP和SVC,进行单独建模。规范化的交通事故数量Ci定义为:

式中,Ni为i路段的原始交通事故数量,Li为道路长度(km)。
4.2.2自变量:街景要素比例
街道级建成环境变量,即街景要素指标,被用作主要的自变量。在对街景图像进行语义图像分割后,得到了语义图像中显示的街景要素的覆盖比率,如图3(c)所示。这些不同街景要素的覆盖比率被用作街景要素指标的代理变量。采样位置的街景图像平均百分比在一条道路的缓冲区内被用作那条街的街景要素指标。街景要素j的指标被定义为

其中,k是道路段i缓冲区内的图像数量,v是不同视角(例如前方、后方、左侧和右侧),N是一张街景图像的像素数(获取的语义图像的像素大小为512×512,因此N恒定为512×512=262,144),Nj是要素j的像素数。
4.2.3自变量:混合土地利用变量
此外,一些与交通事故相关的社会经济变量是利用兴趣点(POIs)数据创建的。近期研究已证实土地利用设计配置与交通事故密切相关(Ewing and Cervero 2010)。因此,创建了一些与混合土地利用相关的代理变量作为辅助因素。本研究的假设是城市功能的混合程度反映了区域城市功能结构。这些指标用于从不同方面评估基于POIs的混合土地利用,并能有效验证土地利用变量对交通事故的影响。混合土地使用变量的详细信息可在补充附件A1中找到。
4.3 模拟交通事故
交通事故数量数据经常包含大量的零值,因为许多路段的事故少(见图2)。从统计学角度看,观察到的零的数量超过了泊松分布或负二项分布的预测,使这些数据被归类为零膨胀数据。这种问题被称为零膨胀现象,会导致交通事故分布在空间上的显著偏差。因此,应当特别对此进行建模,以纠正地理位置与交通事故数量之间的回归关系(Huang and Chin 2010; Lukusa and Phoa 2020)。在忽视零膨胀问题的模型中,使用包含“许多零”的交通事故数量数据会导致不准确和无效的参数估计。此外,考虑到环境因素的影响随地点而异,许多空间模型方法为预测交通事故数量提供了显著改进的估计(Lord and Mannering 2010)。因此,在本研究中,采用了迁移学习策略,具体是分类后回归策略,分别处理零膨胀问题和空间异质性。首先,将交通事故数量离散为两个类别:1表示路段上发生交通事故(不论发生次数),0表示路段上未发生交通事故(从未发生)。此外,训练了一个多层感知机(MLP)神经网络模型,分类评估交通事故的概率。其次,从具有先验事故分类知识的MLP模型的隐含层提取嵌入特征,作为新特征输入到GWPR模型中,以基于交通事故数量估计空间异质性。
多层感知机神经网络模型(Murtagh 1991)是在城市研究的多个应用领域广泛使用的前馈人工神经网络(Delashmit and Manry 2005)。MLP已被数学证明是一种普适逼近算法;因此,它能够从原始特征中学习先验知识。在这项研究中,对一个“基本”多层感知机神经网络模型(图4)进行了预训练,用来调查“许多零”的交通事故统计数据中的先验知识,使用二元分类在交通事故的概率与交通相关自变量之间进行分析。模型包括输入层、隐藏层和输出层。随后,提取MLP隐藏层中的权重(嵌入表示),用于回归分析中的交通事故数量拟合。
为了探索交通事故与自变量之间的空间异质性关联,引入了GWPR模型来探究交通事故的空间变化分布。GWPR模型允许参数值随空间单位ui(描述道路段i的解释变量)的变化而变化,以预测交通事故的数量。模型规范可以写成:
![]()
其中ln(Y)表示每个路段预期事故次数的自然对数。Xk是第k个解释变量(k=1,2,3,…k),βk为空间单位ui的函数,其中ui =(xi,yi)表示空间中道路段i的二维坐标。GWPR模型通过估计的参数β =(β0,β1,β2,…,βk)在道路段之间的变化来考虑空间异质性。GWPR模型参数是使用局部最大似然原则估计的。
两种常用的评估指标用来评价GWPR模型的性能:赤池信息量准则(AIC) (Sakamoto et al. 1986) 和具有偏差校正的赤池信息量准则(AICc) (Pirdavani et al . 2014)。注意,AIC和AICc值较小的模型具有较高的拟合优度,表明模型的性能更佳。
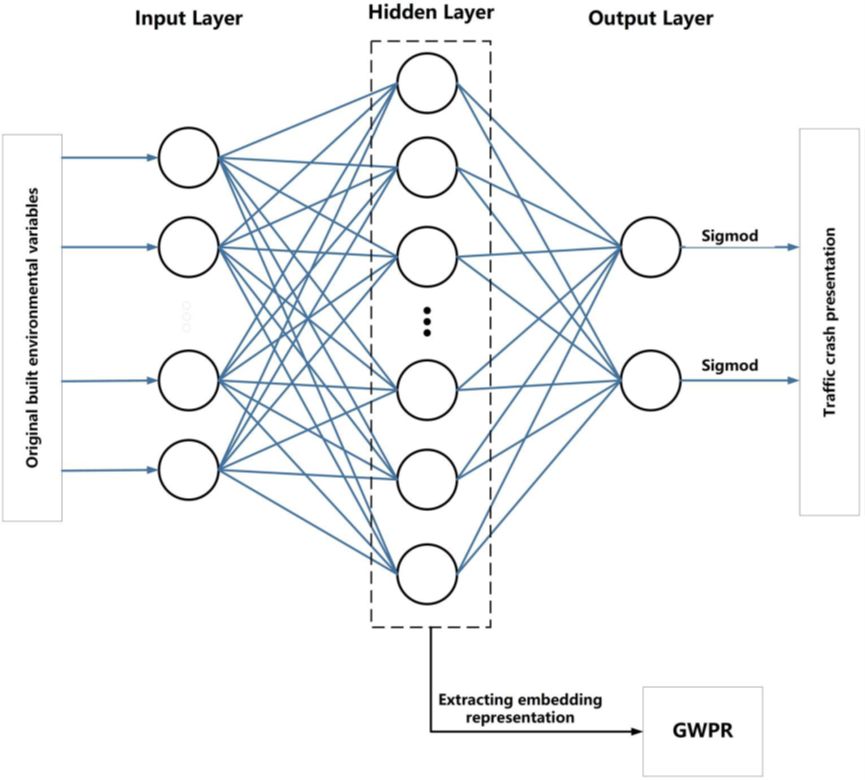
图4. 交通事故二元分类的MLP神经网络模型体系结构
【实验结果】
5.1 描述性空间分析
表2列出了本研究最终的变量集合及其汇总统计数据。图5展示了交通事故的空间分布。该图显示了不同类型交通事故之间的空间分布模式。例如,大部分VCP事故发生在九龙半岛西部(深水埗和油尖旺区的市中心地区)。而大多数SVC事故则高度集中在九龙半岛东部(黄大仙和观塘区)。九龙城地区的交通事故较少。此外,表3中显示的空间自相关结果表明,研究区域内的交通事故存在显著的空间聚集模式。因此,在这项研究中,借鉴了先前的研究(Zhang et al. 2015; Su et al. 2022),并使用了地理加权模型来进一步调查交通事故的空间影响要素。
影响最大的街景要素包括建筑物、道路和天空,其平均值分别为36.23%、27.15%和11.36%(表2)。图6展示了9种街景要素的空间分布比例:道路、建筑物、树木、天空、人行道、汽车、墙壁、围栏和植物。这些街景要素的空间分布模式彼此不同。例如,深水埗、油尖旺和九龙城区的市中心地区在街景视角下建筑物元素的比例较高,但树木和天空元素的比例较低,这表明与交通事故的关联不明确。
表2. 因变量和自变量的描述性统计
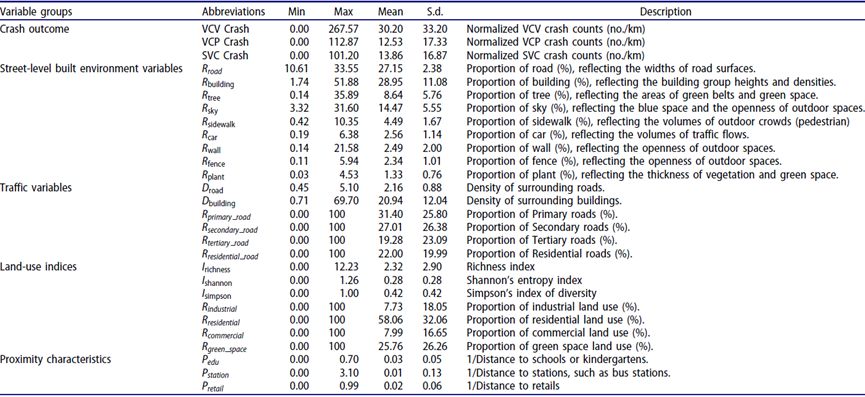
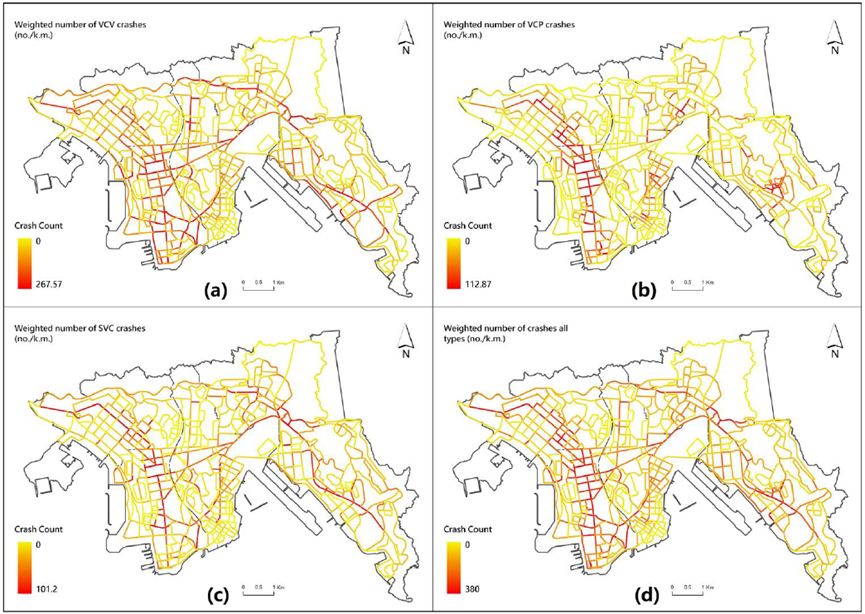
图5. 交通事故的空间分布(件/公里):(a)标准化的VCV事故数量,(b) 标准化的VCP事故数量,(c) 标准化的SVC事故数量,以及 (d) 所有类型的标准化交通事故数量。
表3. 基于全局Moran指数的空间自相关汇总

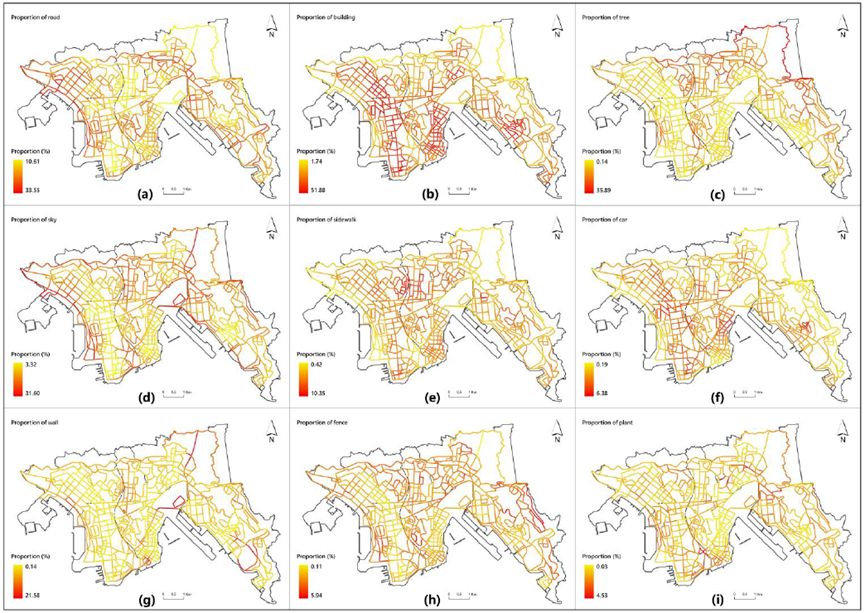
图6. 街景要素变量的空间分布。
5.2 建模性能
在本研究中,使用了多层感知器(MLP)神经网络模型来预测交通事故的概率。受之前探索性研究的启发,MLP模型中使用了随机梯度下降(SGD)优化器。训练周期的最大次数设定为100次,以足够拟合MLP模型。隐藏层的神经元数量设为12,以保持与原始特征数量的一致性。学习率设定为0.01,其他参数保持默认值。
将MLP模型与常见的机器学习模型进行了比较,包括线性回归(LR)和随机森林(RF)分类(Jordan and Mitchell 2015)。
以LR为基准模型,用于比较更复杂模型的性能。RF能够捕获因变量和自变量之间的非线性关系。采用二分类准确率来比较和评估建模性能,结果见表4。MLP模型的表现超越了其他机器学习模型。MLP模型在SVC、VCV和VCP交通事故的预测准确率显著高于其他两种模型。因此,MLP模型拟合交通事故的概率,为回归分析提供了有力的证明。
为理解集成嵌入表示和GWPR模型的性能和有效性,进行了比较。三个面板如下:
1. GLM:广义线性模型。使用GLM作为基准模型,可以与更先进或复杂的模型进行公平和一致的比较。GLM被用来展示GWPR模型捕捉空间异质性的优势。GLM中的所有参数都假设为固定。
2. NBM:负二项回归模型。NBM经常用作统计分析中的基准模型,特别是在处理计数或过分散数据时。NBM专门设计用于计数数据,其中响应变量表示在既定观察单位内事件(本研究中的交通事故)的发生次数。NBM考虑到计数数据的过分散,与简单模型如泊松回归相比,模型拟合得到改善。NBM中的所有参数都假设为固定。
3. GWPRo:使用原始特征输入的GWPR模型。原始特征包括表2中列出的街道层级的建成环境和土地利用变量。
4. GWPRe:使用嵌入特征输入的GWPR模型。嵌入特征是从前述MLP模型的隐藏层提取的,用于交通事故率的预测。
表5展示了各模型在拟合交通事故次数方面的比较结果。根据结果观察到:(1)GWPR模型在拟合交通事故次数方面优于GLM和NBM。这一结果与Li等人(2013)的发现相似,即GWPR在捕捉空间非平稳关系方面有效,并且在预测加利福尼亚州各县的致命事故方面表现优于GLM和NBM;(2)使用嵌入特征输入的GWPR模型在所有类型事故的AIC和AICc上获得更好的拟合度,性能指标降低约10.7%–18.7%。这一结果表明,从预训练的MLP模型中提取的先验知识与交通事故数量高度相关。
使用GWPRe面板拟合交通事故数量而设计的消融实验如表6所示,其中每两个相邻的实验来自一组控制实验。例如,使用交通变量和邻近特性(实验2)的结果比仅使用交通变量(实验1)更好,因为AICc指标降低了4.7%。通过整合土地利用指数来提取土地利用设计配置(实验3),AICc值可以进一步从22512.183降至19524.655。此外,还在实验4中测试了来自街景要素比率的建成环境特征对交通事故次数的贡献;AICc指标提高了12.7%,从19524.655降至17040.876。消融实验结果显示,所提出框架中使用的所有策略都有助于提高拟合交通事故次数的性能,且从街景图像数据中提取的街道级建成环境变量贡献最为显著。
表4.二元分类预测交通事故概率的准确性汇总


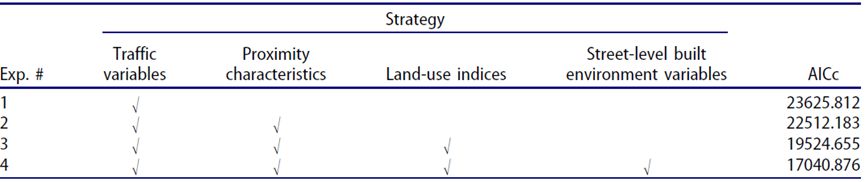
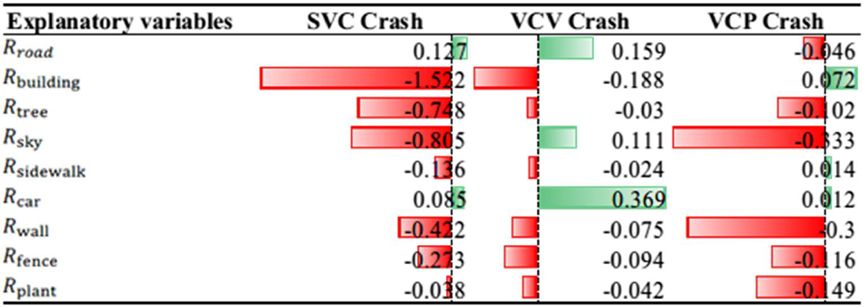
图7. 具有原始特征的GWPR模型的平均估计参数。关于GWPR参数估计的更多汇总统计数据可在补充附录A2中找到。
5.3 街景要素变量的影响
图7显示了GWPR模型下原始特征对不同交通事故的整体影响。图8显示了研究区域内对交通事故有正向影响和负向影响街景图像样本。
红色和蓝色条形的大小比较揭示了街景要素比例变量对不同类型交通事故影响的大小。汽车是对所有类型事故影响最大的街景要素。高密度的汽车与交通事故数量增加有关。相比之下,高比例的城市化元素,如建筑、墙壁、围栏和人行道与较低的交通事故频率有关。建筑是对VCP事故影响最大的街景要素。这些结果表明城市和乡村街景环境之间的差异。在城市非中心区域,道路通常特征为宽阔的道路表面和两侧丰富的绿化(例如高速公路),更多的SVC和VCV事故可能由于疲劳或高速驾驶而发生。然而,在这些地区发生的VCP事故较少,因为乡村地区道路周围居民较少。
在道路表面和汽车比例较高的道路上,更可能发生VCV事故。众所周知,行驶着众多车辆的宽阔道路和车辆与车辆间交通事故有关。建筑、树木和天空的高比例有助于减少VCP、SVC和VCV事故。建筑物的比例对SVC事故的影响大于对VCV事故。此外,建筑比例高的地方观察到VCP事故频率增加。我们认为,建筑比例反映的是建筑群的高度和密度,暗示了城市化的建设水平,而不是建筑物本身的效果。因此,建筑比例和周围建筑密度可以作为代理变量,反映人口流动、街道周围交通流量以及建成环境设计多样性和对交通安全的影响。在树木和天空比例高的情况下,VCP事故发生的可能性降低。这些结果揭示了发生交通事故的道路段的视景特征,表明了街景级别的建成环境特征与各种交通事故之间的潜在关系。
此外,通过分析街景要素变量与其他特征的共同贡献,我们可以得出许多有趣的结论。研究结果显示,靠近特殊用途建筑(如学校、车站和商店)可能会加剧与行人相关的交通事故风险。同时,我们发现除了道路比例外,道路密度对所有类型的事故都有显著影响,不同道路类型的比例分布对交通事故也有差异性影响。此外,结果类似于Asadi等人(2022)的研究结果,即土地利用变量与不同的交通事故存在偏倚相关性。
街景要素比例变量可反映道路段级别的建成环境特征。几种街景要素变量的组合是重要的事故预测因素。例如,大多数人行道位于有住宅和商业活动的大城市区域(见图6),而人流量(行人)已被证明与此密切相关。因此,人行道的比例会决定室外人群的数量。此外,可以结合天空、树木和植物的比例来描述户外空间(如蓝绿空间)的视觉封闭性(Yin and Wang 2016; Gong et al. 2018)。视觉封闭性对交通事故有轻微影响,因为它间接影响了驾驶心理和行为(Helbich et al. 2019)。
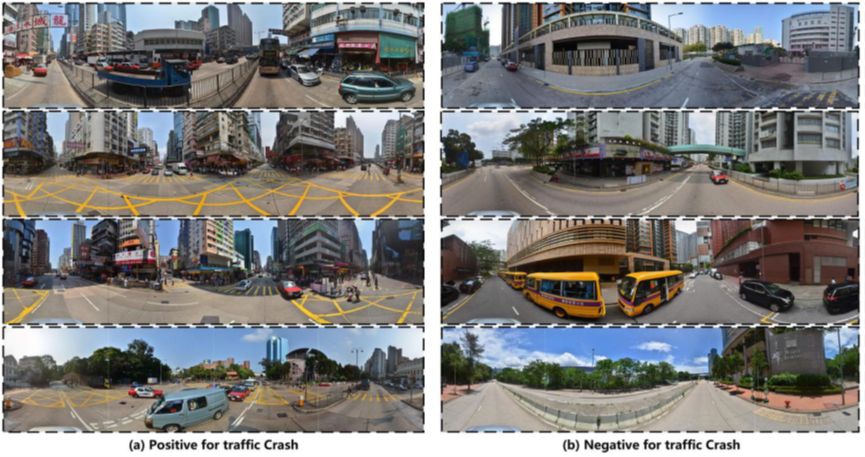
图8. 对交通事故有正向影响和负向影响的街景图像样本
【讨论与结论】
本研究的目的是探讨交通事故与街景特征之间的关系。回顾了以往的研究,包括与交通相关的建成环境因素、事故预测模型以及街景图像的最新应用。据此,本研究提出了一种道路路段层级的交通事故计数的空间建模方法。首先,使用深度学习方法从街景图像中提取街景要素比例。随后,创建了一系列与交通事故相关的变量。考虑到零膨胀和空间异质性问题,预训练了一个MLP神经网络模型来评估交通事故的概率。此外,从MLP中提取了先前的事故分类知识。使用先验知识来拟合GWPR模型。结果表明,所提出的方法优于基准方法和比较方法。最后,分析了街景要素变量对不同交通事故类型的空间影响。本研究的贡献如下:
1. 我们通过街景图像的语义图像分割,以可扩展且高效的方式探测街道级别的城市建成环境与道路安全之间的关系。
2. 我们扩展了以前的文献,确定了街道上发生的各种类型的撞车事故。
3. 提出的方法在考虑零通货膨胀和空间异质性的同时,研究了各种事故类型、街道级建成环境变量、交通变量、土地利用指数和邻近特征之间的关联。据我们所知,这是首次综合解决这些因素。
此外,我们探索了该方法具有优越性能的潜在原因。在涉及预测交通事故数量的任务中,这通常被视为一个回归问题。然而,数据中存在的复杂性、不确定性和噪声,给回归任务带来了挑战,训练传统的机器学习或统计分析模型变得困难。为解决此问题,我们采用了“分类再回”归策略。分类步骤提高了准确性并减少了分类过程的复杂性,进而从解释变量中提取有价值的信息。随后的回归步骤侧重于对交通事故数据中的空间异质性和零膨胀问题进行建模,从而提高回归模型的性能。
GWPR模型是将空间异质性纳入泊松回归的一种空间回归技术。尽管 GWPR 提供了一些优势,但它也有一些局限性需要考虑。一方面,GWPR 可能计算密集且耗时,尤其是在处理大型数据集或大量空间单元时。每个地点都估计一个单独的回归方程,当研究区域较大或有限的计算资源时,单独估计每个位置的回归方程可能变得不切实际。另一方面,GWPR 没有提供自动的模型选择标准来确定最合适的预测变量集合或空间权重。研究人员必须依赖于他们的判断和先前知识来决定包括哪些变量以及如何指定空间权重。如果不仔细处理,这种主观性会引入潜在的偏差或次优模型规格。
从这项研究中获得的知识可用于制定空间响应策略以减少交通事故和伤害。认识到街景建成环境与交通事故的关联有助于制定有效的规划,建设具有修复力的人类住区。同时,这项研究丰富了基于地点的 GIS 研究,因为它展示了如何利用这些地理数据集来深入了解交通安全评估。我们的分析揭示了交通事故数量的空间分布及其与建成环境变量的关系。这些发现对交通规划有着重要的影响,这是 GIS 研究者关注的领域之一。
未来的研究需要在一个扩展的研究区域内,对多模式交通事故数据支持的多个领域的特征组合进行联合分析。由于多时段街景图像数据的限制,本研究依赖于空间建模,而非时空建模。尽管如此,这项研究为使用街景图像在道路段级别建模交通事故铺平了道路。















 4380
4380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









