







绿视率,即人的视野中绿色所占的比重,是街景分析中常用的评价指标之一。相较于反映二维层面绿化情况的绿地率、绿化覆盖率、归一化植被指数(NDVI)等,绿视率能够从立体视野直观反映人对绿色空间的感知,可以更人性化地反映绿化环境质量。本文结合相关文献资料,主要介绍基于深度学习技术 DeepLab V3+模型算法的街道绿视率评价。
一、方法对比
1.人工调研提取法
将街景照片绿色部分进行手工划分计算街景中的绿色占比。该方法精度低、费时费力,无法应用于大区域的城市绿视率计算。
2.软件色彩处理法
通过分析街景中绿色像素的比例,将 RGB 转换为 HSV 空间,提取绿色部分的阈值用以表示绿视率。此类方法较人工调研提取法有所改进,但会将绿色招牌等不属于城市绿化的绿色部分计算在内,使得结果存在较大误差。
3.深度学习提取法
模拟人类的思考和学习能力,自动识别街景中的绿化要素,自动分类出城市街道空间的植被等元素,提升了绿视率识别的精度。目前常用的有PSPnet、DeepLab V3、DeepLab V3+、Fastrcnn、HSV色彩阈值5种算法。
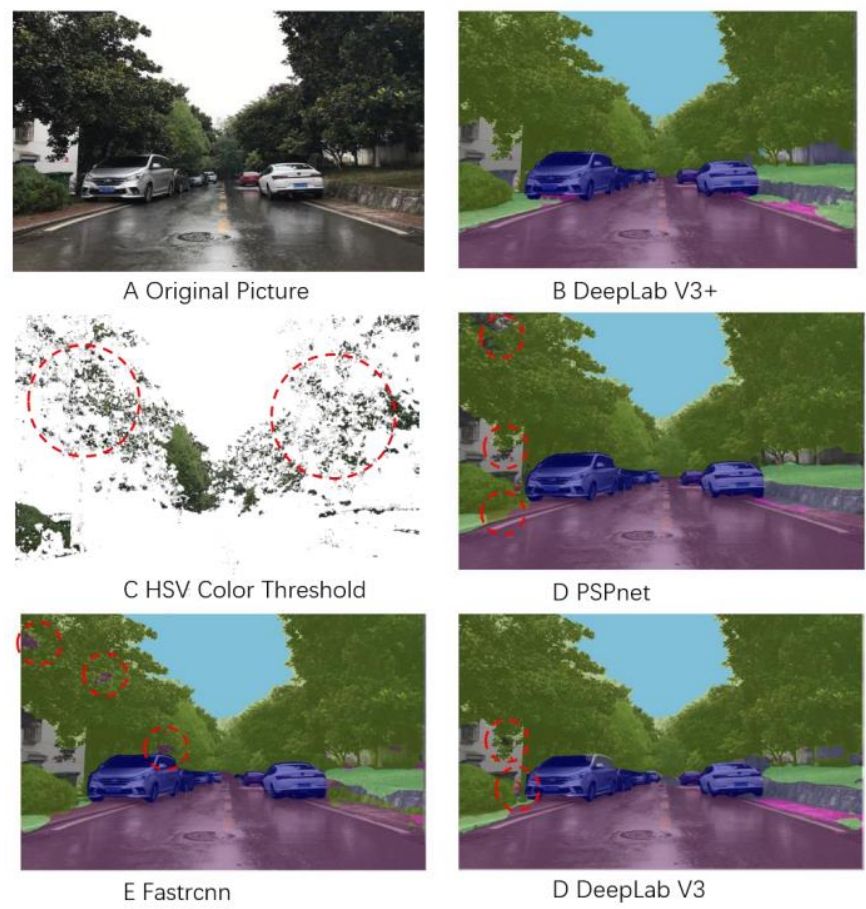
从图中可以看出,在分割的精度上 DeepLab V3+相对于其他 4 种方法精度最高。
二、DeepLab V3+模型结构

在 DeeplabV3+中,加强特征提取网络可以分为两部分:
1.Encoder
在 Encoder 中,对压缩四次的初步有效特征层利用并行的 Atrous Convolution,分别用不同 rate 的 Atrous Convolution 进行特征提取后合并&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2005
2005

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









