




论文题目:基于图像分割与双目立体视觉的透明液体液位测量研究
期刊:传感器与微系统
摘要:提出了一种基于 UNet图像分割与 RAFT-Stereo 立体匹配的双目视觉方法,用于高精度测量透明液体液位。针对传统双目立体匹配在透明液体场景中因纹理缺失导致的深度估计误差问题,该方法通过UNet 网络对液面区域进行精确分割,生成像素级掩膜以突出液面特征;结合RAFT-Stereo 算法计算视差并转换为深度信息,显著提升了液位测量的准确性与鲁棒性。实验结果表明,该方法显著优于传统半全局块匹配(SCBM)和RAFT-Stereo算法,平均绝对误差(MAE)和最大误差(MaxE)分别降低约85.2%和82.1%,有效改善了透明液体液面模糊和匹配失败问题。未来研究可进一步优化模型实时性,为航天燃料罐监测等实际应用提供可靠技术支持。
基于深度学习的透明液体液位测量新方法
引言
液位测量在航空航天、石油化工、船舶等领域扮演着至关重要的角色,直接影响着工艺控制、产品质量和设备安全。然而,透明液体(如液氮、液氧等低温液体)的液位测量一直是个技术难题。由于缺乏明显的纹理特征和清晰的液面边界,传统的测量方法往往力不从心。
最近,来自中北大学的研究团队在《传感器与微系统》期刊上发表了一篇创新性论文,提出了一种结合UNet图像分割与RAFT-Stereo立体匹配的双目视觉方法,为透明液体液位的高精度测量提供了全新的解决方案。
传统方法面临的挑战
为什么透明液体测量这么难?
想象一下,当你用相机拍摄一杯清水时,你很难清楚地看到水面在哪里——这正是透明液体测量的核心难题。在计算机视觉领域,双目立体视觉技术通过模拟人类双眼来感知深度,但这种方法严重依赖于物体表面的纹理特征。透明液体几乎没有纹理,这使得传统的立体匹配算法(如半全局块匹配SGBM)很难找到对应点,从而无法准确计算深度。
现有方法的局限
- 激光光斑法:需要激光在液面形成清晰的光斑,但对液体透明度要求很高
- 红外图像法:依赖温差来识别液面,在温度均匀的环境下效果不佳
- 染色法:需要对液体进行染色处理,改变了液体本身的性质
- 侧面测量法:只能从容器侧面进行测量,应用场景受限
创新的解决方案
研究团队提出的方法巧妙地结合了两项前沿技术:
1. UNet图像分割:精准定位液面区域
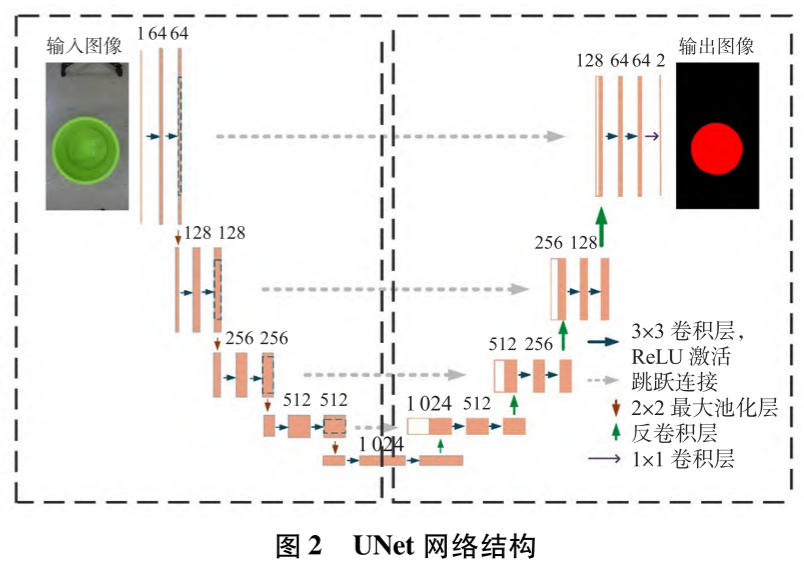
UNet是一种经典的深度学习图像分割网络,它采用对称的"编码器-解码器"架构。研究团队利用UNet对液面区域进行像素级分割,即使在液面边界模糊、对比度低的情况下,也能准确地识别出液面位置。
关键技术细节:
- 跳跃连接:将编码器不同层次的特征传递给解码器,有效保留边缘轮廓信息
- 组合损失函数:结合交叉熵损失和Dice损失,既保证整体分类准确性,又增强对小目标区域(液面)的学习能力
- 数据增强:通过图像旋转、翻转、亮度调整等策略丰富训练样本
2. RAFT-Stereo立体匹配:精确计算深度
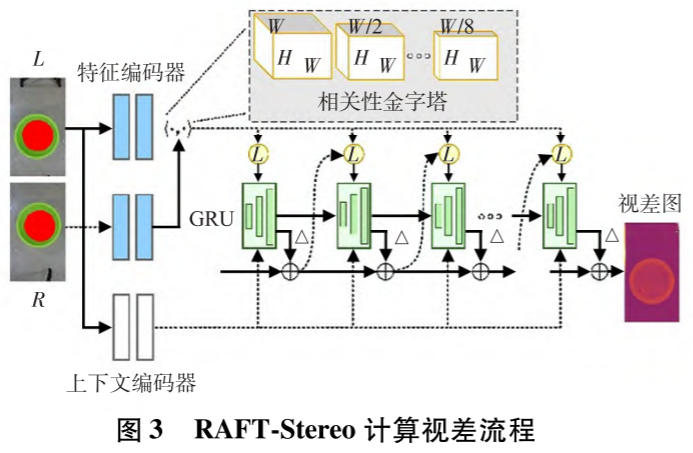
RAFT-Stereo是一种改进自光流估计的立体匹配算法,特别适合处理弱纹理场景。它通过以下机制提升了深度估计的准确性:
- 相关性金字塔:构建多尺度的特征相关性,从全局到局部逐步精细匹配
- 迭代更新单元:基于GRU(门控循环单元)的更新机制,多次迭代优化视差估计
- 特征提取器:从校正后的左右图像中提取紧凑的特征表示
3. 两者的完美结合
研究的核心创新在于将UNet分割结果与RAFT-Stereo立体匹配相结合:
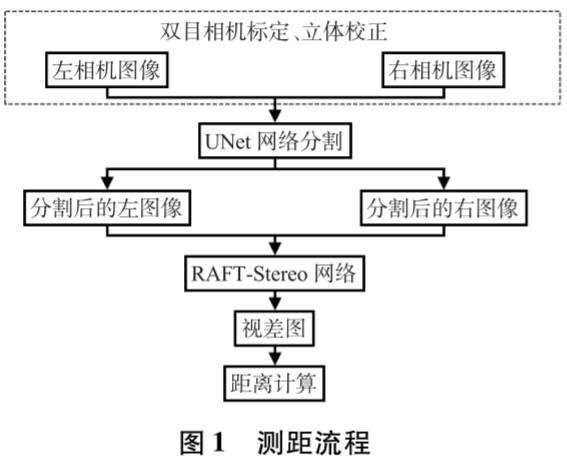
- 首先用UNet精确分割出液面区域,生成掩膜图像
- 将掩膜图像与原始图像融合,突出液面特征
- 利用RAFT-Stereo对融合后的图像进行立体匹配,计算视差
- 根据相机标定参数,将视差转换为深度信息,进而推算液位高度
这种方法有效地解决了透明液体因缺乏纹理而导致的深度估计误差问题。
实验验证与卓越成果
实验设置
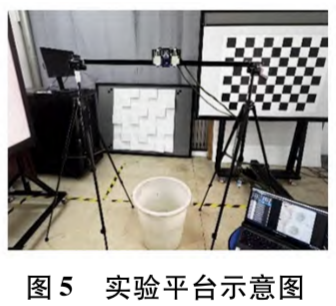
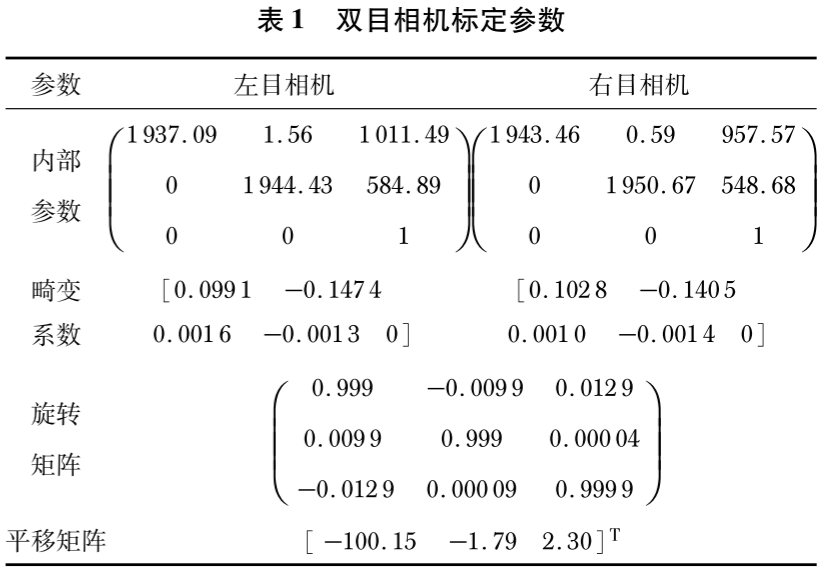
研究团队搭建了一个由两台单目相机构成的双目视觉系统,基线长度约10厘米。相机采用AR0230CS的1/2.7英寸CMOS图像传感器,分辨率为1920×1080。实验采用逐步注液的方式控制液位变化,每次注液后静置数秒以消除液面扰动,然后同步记录图像数据和精确测距值。
令人瞩目的结果
实验结果令人印象深刻。在10组不同液位的测试中:
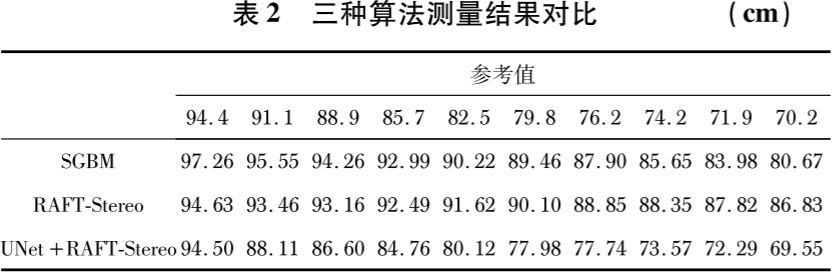
| 算法 | 平均绝对误差(MAE) | 平均相对误差(MRE) | 最大误差(MaxE) |
|---|---|---|---|
| SGBM | 8.304 cm | 10.64% | 12.08 cm |
| RAFT-Stereo | 9.241 cm | 12.10% | 16.63 cm |
| UNet + RAFT-Stereo | 1.37 cm | 1.66% | 2.99 cm |
从数据可以看出,UNet + RAFT-Stereo方法相比传统SGBM算法:
- 平均绝对误差降低了约85.2%
- 最大误差降低了约82.1%
视觉效果对比

从深度图的视觉效果来看,差异更加明显:
- SGBM算法:在液面区域存在大片无效视差,边缘过渡模糊
- RAFT-Stereo算法:液面区域的深度信息与地面比较相近,变化不明显
- UNet + RAFT-Stereo:液面区域深度信息清晰,与地面区域对比明显,液面边界清晰可辨
技术优势与应用前景
主要优势
- 非接触式测量:可从液体正上方进行测量,无需物理接触
- 无需预处理:不需要对液体染色或依赖特殊光照条件
- 高精度:平均相对误差仅1.66%,满足大多数工业应用需求
- 鲁棒性强:有效应对液面模糊、低对比度等挑战
- 成本低廉:基于普通相机和开源算法,成本可控
应用场景
这项技术具有广泛的应用前景:
- 航空航天:火箭燃料罐(液氧、液氢)的液位监测
- 石油化工:各种透明或半透明液体的储罐液位测量
- 医疗制药:透明药液的精确计量
- 食品工业:透明饮料生产线的液位控制
- 科学研究:低温液体(液氮、液氦)的实验室测量
未来展望
研究团队也指出了一些有待改进的方向:
- 实时性优化:当前方法的处理速度还有提升空间,未来可通过模型轻量化、硬件加速等手段提高实时性
- 泛化能力:在更多种类的透明液体和容器上进行验证
- 复杂场景适应:研究在光照变化、液面波动等复杂条件下的鲁棒性
结语
这项研究成功地将深度学习的图像分割技术与传统的双目立体视觉相结合,为透明液体液位测量这一长期困扰工业界的难题提供了创新性的解决方案。通过UNet精准定位液面区域,再利用RAFT-Stereo进行高精度深度估计,该方法实现了平均绝对误差降低85.2%的突破性成果。
随着技术的进一步优化和完善,这种方法有望在航空航天、石油化工等关键领域得到广泛应用,为透明液体的智能监测提供可靠的技术支持。

















 1131
1131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









