







开始旅程(预计顺利需要1天)
最近复现Learning High-Speed Flight in the Wild出现了很多预料之外的问题,经过两天奋斗总算解决,有一点小问题就容易把时间拖很长
注意事项
磨刀不费砍柴工,实现时确认自己能不能接受这些代价:
- Ubuntu 20.04是最好的选择,在Ubuntu18实现必然会出现一些关于python不兼容的问题,确实有博主解决了,但可能没那么简单很快解决问题
- 我这次花费时间最多的地方在于一个奇怪的bug, 即Gazebo仿真器出现free pointer错误导致的整个编译失败,所以按照我的想法,最好是提前测试一下gazebo --version命令,一般不会出问题,但是如果有问题,整个编译过不去,这个问题很怪,我最后不得已重装系统解决
- 推荐两个blog:
Learning High-Speed Flight in the Wild 环境安装 *****
论文学习–Learning High-Speed Flight in the Wild ****
两个文章会覆盖很多出现的问题,如果一个较新的系统按这个安装会遇到比较少的问题,之前我使用一年多的Ubuntu系统就会遇到各种奇怪的问题,因为是18升20,各种依赖关系很复杂。
-
确实自己电脑带显卡,整个仿真是需要显卡支持的,虽然我在另一台Ubuntu18上没有成功实现(第一条,懒得搞了),
但是经过确认显卡1660Super是可以的,其实仿真卡顿严重,可能这就是仿真出图很慢的一个原因吧 -
之前系统环境(第二条)比较杂乱,整个系统只有这个问题,其他一点没问题,根本找不到问题,怀疑是CPU兼容问题,事实上是我多虑了,AMD、INTEL都可以
-
这次实验成功的平台是显卡3060 laptop
整体的安装流程遵循原始的GitHub+博客,我就不写了
略
代码链接
我将我成功的代码放到了网盘上,但是一些路径和依赖文件还是需要读者自己手动安装。
链接: https://pan.baidu.com/s/1lcjHxLvGTtr-OnvQhrGrng?pwd=a123 提取码: a123
快捷启动
# 每个窗口都要执行
cd agile_autonomy_ws
source devel/setup.bash
# 窗口 1
roslaunch agile_autonomy simulation.launch
# 窗口 2
conda activate tf_24 # source tf_24/bin/activate (style for: python -m venv tf_24 & pyenv install 3.7.15) *link for learning: https://realpython.com/python-virtual-environments-a-primer/
roscd planner_learning/
python test_trajectories.py --settings_file=config/test_settings.yaml
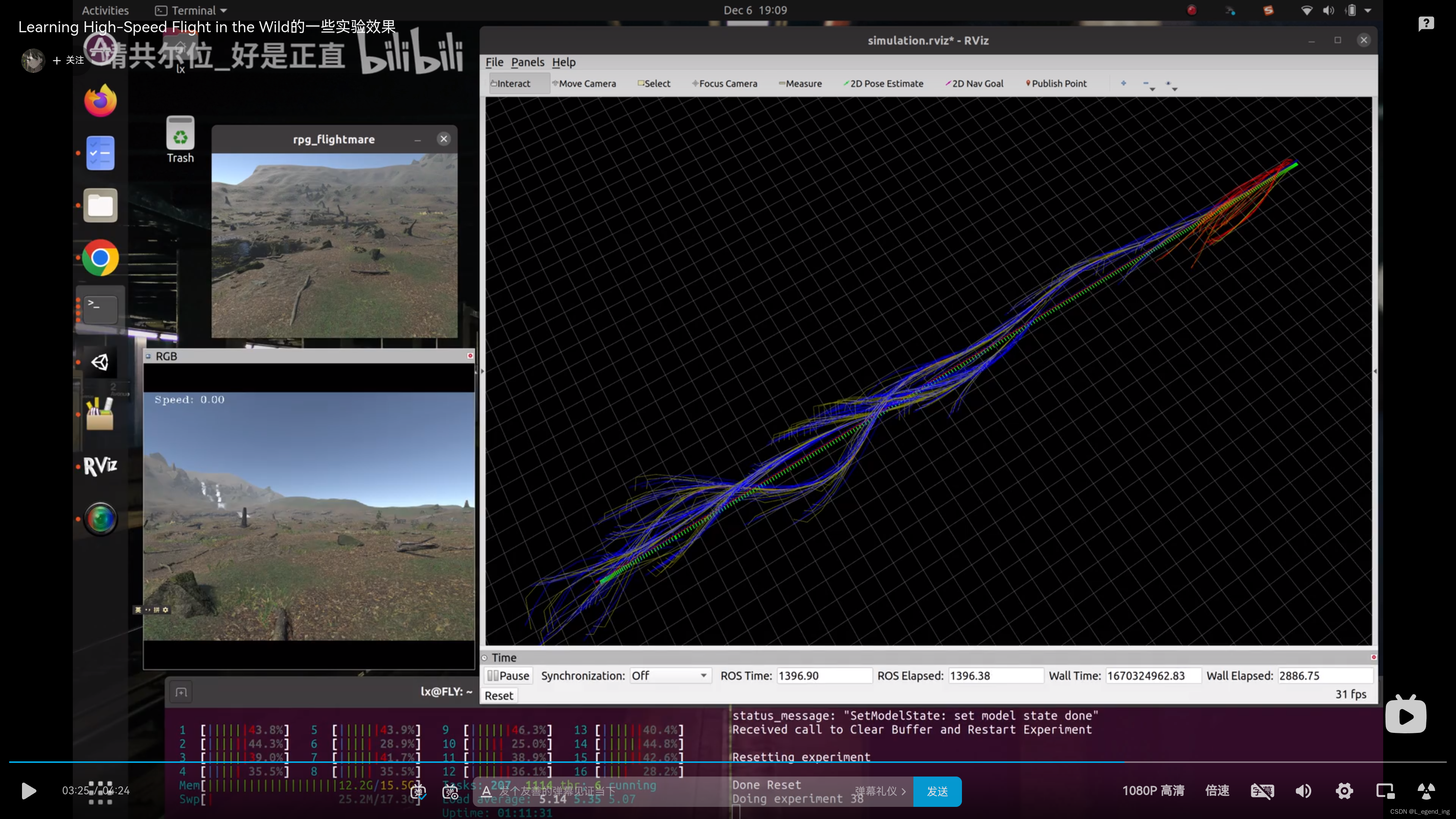
实现效果
END















 3681
3681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









