







1. IMU的输出内容
IMU(惯性测量单元)的输出主要包括以下几类信号:
-
加速度数据
三轴加速度计输出沿 X、Y、Z 轴方向的线性加速度,这些数据反映了物体受到的重力及运动加速度。 -
角速度数据
三轴陀螺仪输出绕 X、Y、Z 轴的角速度,描述了物体的旋转情况。 -
磁场数据(视具体型号而定)
如果IMU内集成了磁力计,则还会输出三轴磁场数据,用于辅助判断绝对方向和校正姿态漂移。 -
温度数据(部分型号)
某些IMU会提供内部温度信息,以便进行温度补偿和噪声分析。
此外,经过传感器融合算法处理后,部分系统还可以直接输出估计的姿态信息,但这些是基于原始传感器数据进一步计算得到的结果.
2. 主要组成部件
-
加速度计
测量物体在三个正交轴上的线性加速度。内部通常有一个微小的“惯性块”(proof mass),当设备受到加速度作用时,该惯性块相对于外壳产生位移,通过检测这种位移来计算加速度。 -
陀螺仪
测量物体绕各轴的角速度。现代IMU大多采用MEMS陀螺仪,利用科氏效应(Coriolis Effect):当一个振动元件在旋转系统中运动时,科氏力会使其振动方向发生偏转,通过检测这种偏转就能计算出旋转速度。 -
磁力计(有时集成)
用于测量地磁场方向,辅助确定设备的绝对朝向,尤其在GPS信号弱或无GPS时提供方位参考。
3. IMU组成部件工作原理
3.1. 加速度计
1. 加速度计的底层工作原理
加速度计的底层原理还是牛顿第二定律:物体的加速度与施加到该物体上的力成正比,即 F = m a F = ma F=ma.
2. 加速度计的常见类型
| 加速度计类型 | 主要特点 | 工作原理 | 应用场景/优缺点 |
|---|---|---|---|
| MEMS加速度计 | 小型、低功耗、成本低 | 利用微机械结构中悬挂的惯性块在受加速度作用下发生位移,导致电容变化,转换为电压信号 | 广泛用于智能手机、无人机、机器人等消费级和工业级IMU;静态和动态测量均适用 |
| 压电加速度计 | 高频响应快,适合动态测量 | 利用压电材料在受力时产生电荷信号,通过电荷放大后输出与加速度成比例的信号 | 适用于高频振动和冲击测量,但对直流(静态)加速度不敏感 |
| 压阻加速度计 | 结构简单、制造成熟 | 基于半导体应变片受力时电阻发生变化,通过惠斯登电桥检测电阻变化转换为电压信号 | 精度要求适中,但温度敏感;在一些特殊场合也有应用 |
3.2. 陀螺仪
1. 陀螺仪的底层原理
陀螺仪的底层原理主要依赖于两个核心物理效应:
-
角动量守恒原理(传统机械陀螺仪):
在传统机械陀螺仪中,一个高速旋转的转子具有很大的角动量。根据角动量守恒定律,这个转子在没有外力矩作用下会保持其旋转轴方向不变。当陀螺仪本体发生旋转时,由于转子倾向于维持原有的旋转状态,其偏离会产生“进动”现象,通过检测这种进动现象,就可以推断出旋转的角速度和方向。 -
科氏效应(MEMS陀螺仪):
现代多数IMU采用的MEMS陀螺仪,其工作原理基于科氏效应。MEMS陀螺仪中通常有一个振动的微机械结构,当设备发生旋转时,振动体在运动过程中会受到一个垂直于原始振动方向的科氏力,该力的大小与旋转角速度成正比。通过检测这种由科氏力引起的微小振动(通常通过电容、压阻或其他传感方式感知),便能计算出设备的角速度。
2. 进动现象
a. 进动现象 (旋进现象)原理
进动:当陀螺仪本体受到外部力矩时,转子因其较大的角动量倾向于维持原来的自旋状态,结果并不是直接沿力矩方向转动,而是在垂直于自旋轴和外力矩方向上发生缓慢的转动。


当转子自旋角动量 L ⃗ \vec{L} L 很大时,外力矩主要改变的是 L ⃗ \vec{L} L 的方向而非大小,从而产生进动。进动角速度 Ω ⃗ p \vec{\Omega}_p Ωp 满足:
Ω ⃗ p × L ⃗ = M ⃗ \vec{\Omega}_p \times \vec{L} = \vec{M} Ωp×L=M
取模后得:
Ω p = M ∣ L ⃗ ∣ \Omega_p = \frac{M}{|\vec{L}|} Ωp=∣L∣M
其中,转子的角动量 ∣ L ⃗ ∣ |\vec{L}| ∣L∣ 通常由转子转动惯量 I I I 与自旋角速度 ω s \omega_s ωs 决定,即:
∣ L ⃗ ∣ = I ω s |\vec{L}| = I\,\omega_s ∣L∣=Iωs
代入上式可得:
Ω p = M ∣ L ⃗ ∣ = M I ω s \Omega_p = \frac{M}{|\vec{L}|} = \frac{M}{I\,\omega_s} Ωp=∣L∣M=IωsM
- 在外部力矩 M M M 和转子转动惯量 I I I 固定的情况下,进动角速度 Ω p \Omega_p Ωp 与自转角速度 ω s \omega_s ωs 成反比关系。
- 即当自转角速度增大时,进动角速度会减小;反之,当自转角速度减小时,进动角速度增大。
b. 推导陀螺仪本体的旋转角速度
-
预先使转子以稳定且较高的自旋角速度旋转,这通常由电机控制,并且该自旋角速度 ω s \omega_s ωs 被设计为一个已知且恒定的值。
-
当陀螺仪本体(安装在外壳上)发生旋转时,外部施加的旋转角速度 ω ⃗ \vec{\omega} ω 会在转子上产生一个力矩,转子受到的力矩为
M ⃗ = ω ⃗ × L ⃗ \vec{M} = \vec{\omega} \times \vec{L} M=ω×L -
等效力矩
当陀螺仪的外壳以角速度 ω ⃗ \vec{\omega} ω 旋转时,虽然没有施加传统意义上的“力”,但转子却处于一个非惯性(旋转)参考系中。
在这种情况下,角动量向量 L ⃗ \vec{L} L 会因为参考系的旋转而发生改变,数学上描述为:
d L ⃗ d t = ω ⃗ × L ⃗ \frac{d\vec{L}}{dt} = \vec{\omega} \times \vec{L} dtdL=ω×L
这个方程说明,即使在没有“真实”外力矩的情况下,旋转参考系会引入一个等效的时间变化率,从而表现出一个等效的力矩 τ ⃗ eff \vec{\tau}_{\text{eff}} τeff:
τ ⃗ eff = ω ⃗ × L ⃗ = M ⃗ \vec{\tau}_{\text{eff}} = \vec{\omega} \times \vec{L}= \vec{M} τeff=ω×L=M -
等效力矩的物理意义
当陀螺仪的外壳旋转时,转子由于其较大的角动量倾向于保持原来的方向(这就是转子“抗拒”改变方向的性质)。而外部旋转则试图改变这种方向,结果在转子上产生了一个反映为进动的现象,这个现象实际上就是上述等效力矩的体现。 -
旋进角速度计算
将等效力矩代入上式可得:
Ω p = M ∣ L ⃗ ∣ = ∣ ω ⃗ × L ⃗ ∣ I ω s \Omega_p = \frac{M}{|\vec{L}|} = \frac{|\vec{\omega} \times \vec{L}|}{I\,\omega_s} Ωp=∣L∣M=Iωs∣ω×L∣ -
极端情况分析:如果外壳旋转轴( ω ⃗ \vec{\omega} ω的旋转轴)与自旋轴垂直( L ⃗ \vec{L} L的方向)(最敏感情况),则有 :
Ω
p
=
ω
I
ω
s
I
ω
s
=
ω
\Omega_p = \frac{\omega\,I\,\omega_s}{I\,\omega_s} = \omega
Ωp=IωsωIωs=ω
在一般情况下,通过测量进动的分量(利用传感器检测转子因进动产生的偏转),并已知
ω
s
\omega_s
ωs 和
I
I
I,就可以通过上述关系反推外部旋转角速度
ω
⃗
\vec{\omega}
ω 的各分量。
- 分解进动分量
在三轴机械陀螺仪中,通常会通过机械结构或附加传感器(如电位计、光电传感器等)检测转子因进动在设备固定坐标系中的偏转。设检测到的进动角速度在该坐标系中的分量为 Ω p x , Ω p y , Ω p z \Omega_{px}, \Omega_{py}, \Omega_{pz} Ωpx,Ωpy,Ωpz。
3. 科氏效应原理解析
a. 理论概述
-
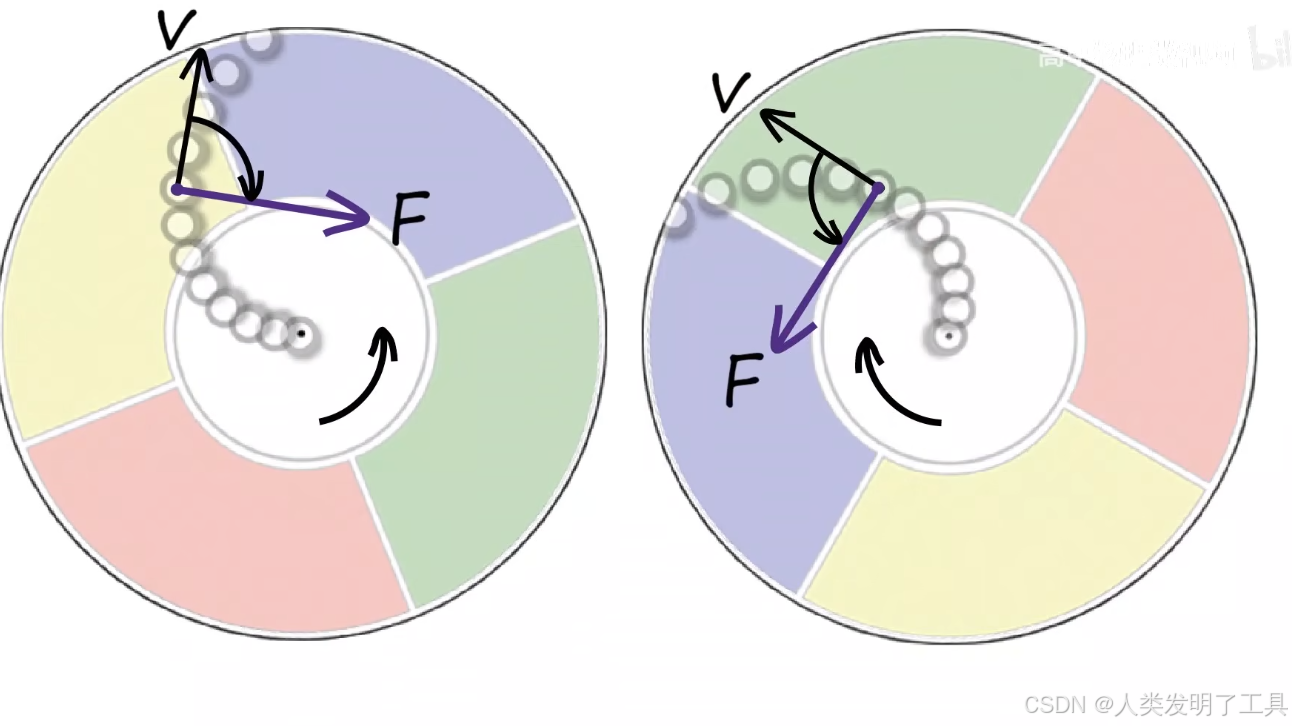
旋转参考系中的虚拟力
当我们处在一个非惯性(旋转)参考系中时,由于参考系自身在旋转,物体的运动轨迹会看起来偏离直线,这种偏离可以用一个虚拟力来解释,这就是科氏力(科里奥利力)。 -
科氏力的物理意义
科氏力实际上并非真实存在的力,而是由于旋转参考系的加速度所引入的一种惯性效应。它使得在旋转系统内运动的物体,其运动轨迹相对于静止观察者来说发生偏转。
b. 数学描述与公式
在旋转参考系中,假设旋转角速度为 Ω ⃗ \vec{\Omega} Ω,物体质量为 m m m,在该参考系内的速度为 v ⃗ \vec{v} v。科氏力 F ⃗ C \vec{F}_C FC 的公式为:
F ⃗ C = − 2 m Ω ⃗ × v ⃗ \vec{F}_C = -2 m\, \vec{\Omega} \times \vec{v} FC=−2mΩ×v
-
符号说明
- Ω ⃗ \vec{\Omega} Ω:旋转参考系的角速度向量,其方向由右手定则确定。
- v ⃗ \vec{v} v:物体在旋转参考系中的速度向量。
- “ × \times ×” 表示叉乘,说明科氏力总是垂直于 Ω ⃗ \vec{\Omega} Ω 和 v ⃗ \vec{v} v 两个向量所在的平面。
- 负号表示科氏力的方向与旋转参考系运动的惯性效应相反。
-
效果
由于科氏力与物体的运动速度和旋转角速度有关,其大小为:
F C = 2 m Ω v sin θ F_C = 2m\,\Omega\,v\,\sin\theta FC=2mΩvsinθ
其中 θ \theta θ 为 Ω ⃗ \vec{\Omega} Ω 与 v ⃗ \vec{v} v 之间的夹角。当 Ω ⃗ \vec{\Omega} Ω 与 v ⃗ \vec{v} v 垂直时, sin θ = 1 \sin\theta = 1 sinθ=1,科氏力达到最大值。
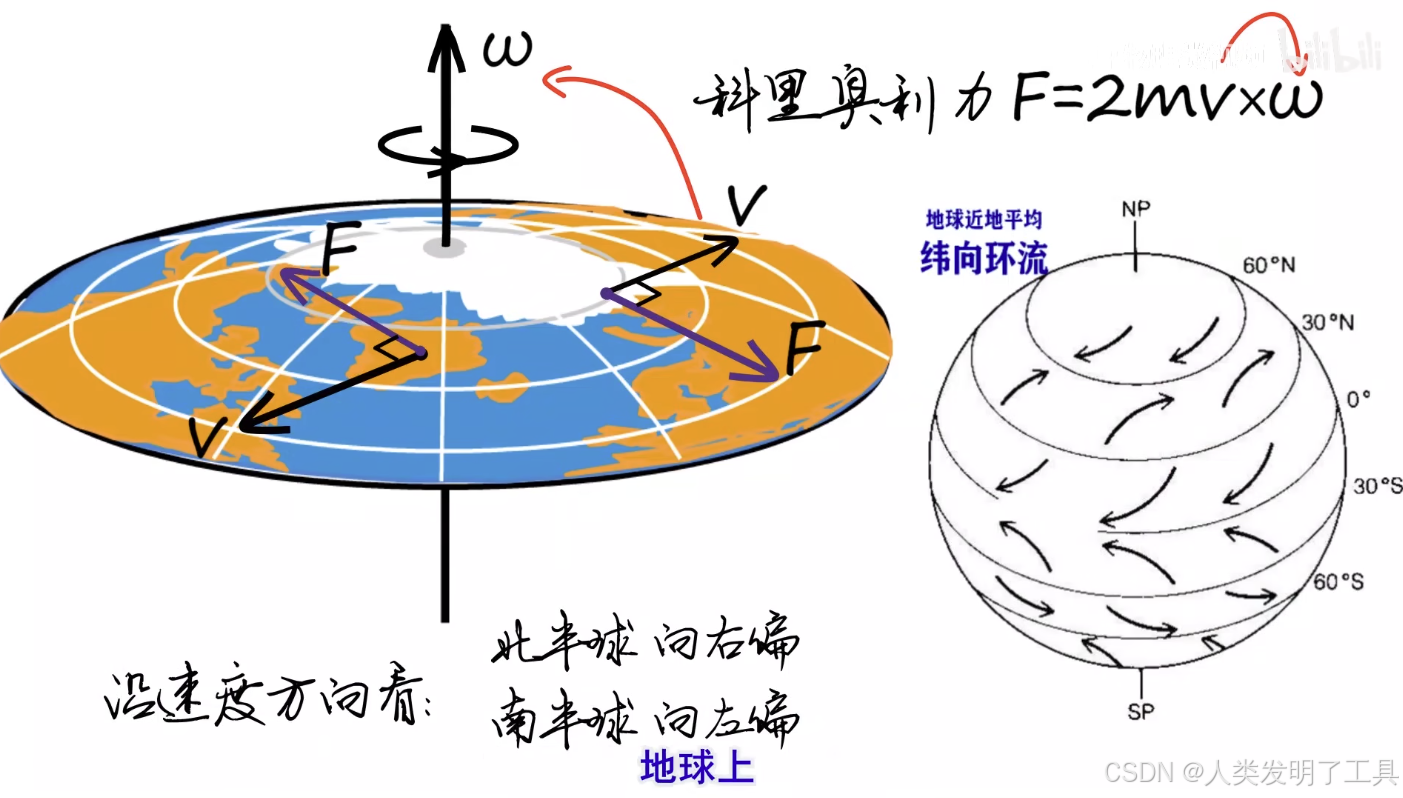
地球上,沿着速度方向看,北半球向右偏,南半球向左偏
c. 示例说明
示例:
设想一个简单的场景:
- 在一个以 Ω = 1 rad/s \Omega = 1\,\text{rad/s} Ω=1rad/s 旋转的圆盘上,一个质量为 m = 1 kg m = 1\,\text{kg} m=1kg 的物体以 v = 2 m/s v = 2\,\text{m/s} v=2m/s 在圆盘上沿径向(与旋转轴垂直)运动。
- 因为径向运动与旋转轴正交,所以 θ = 9 0 ∘ \theta = 90^\circ θ=90∘, sin θ = 1 \sin\theta = 1 sinθ=1。
根据公式,科氏力大小为:
F C = 2 × 1 kg × 1 rad/s × 2 m/s = 4 N F_C = 2 \times 1\,\text{kg} \times 1\,\text{rad/s} \times 2\,\text{m/s} = 4\,\text{N} FC=2×1kg×1rad/s×2m/s=4N
4. 陀螺仪的常见类型
| 陀螺仪类型 | 主要特点 | 工作原理 | 应用场景/优缺点 |
|---|---|---|---|
| MEMS陀螺仪 | 小型、低功耗、成本低、易于集成 | 利用微机电结构中振动元件的科氏效应检测旋转,输出角速度信号 | 广泛应用于消费电子、无人机、便携设备;精度受限,存在漂移和噪声问题 |
| 光纤陀螺仪(FOG) | 高精度、无活动部件、响应快 | 利用光纤内光束传播的干涉原理,测量旋转引起的光程差产生的相位变化 | 常用于航空航天、船舶导航等高精度要求场合;成本较高,对环境要求较严格 |
| 环形激光陀螺仪(RLG) | 精度高、稳定性好 | 利用激光在封闭环腔内多次反射,通过检测旋转产生的频率差来获得角速率 | 应用于军用、航空及高端导航系统;体积较大、功耗高、制造成本较高 |
| 振动陀螺仪 | 结构简单、易于制造,介于MEMS和高端陀螺仪之间 | 利用振动结构(如微振动梁)在旋转时受到科氏力作用,导致振动模式发生变化,从而检测角速度 | 可用于中高端导航和稳定性要求的场合;精度和稳定性介于MEMS与FOG/RLG之间,可根据设计做适当权衡 |
5. MEMS陀螺仪工作原理
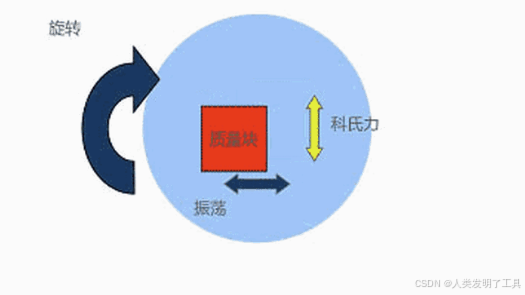
1. 工作原理
在MEMS陀螺仪中,一个微小的振动元件(也称为“检测质量块”)被激励在某一方向(例如 x 轴)振动。当设备绕垂直于该振动方向的轴(例如 z 轴)旋转时,振动质量块会受到一个科氏力的作用,该力的方向与振动方向正交,且与旋转角速度成正比。通过检测这种因科氏力引起的微小位移或应变变化,就可以推算出旋转角速度。
2. 基本公式
在旋转情况下,质量块受到的科氏力 F ⃗ C \vec{F}_C FC 可由下式描述:
F ⃗ C = − 2 m ( Ω ⃗ × v ⃗ ) \vec{F}_C = -2 m\, (\vec{\Omega} \times \vec{v}) FC=−2m(Ω×v)
其中:
- m m m 为质量块的质量
- Ω ⃗ \vec{\Omega} Ω 为陀螺仪的旋转角速度向量
- v ⃗ \vec{v} v 为质量块在检测方向(例如 x 轴)的振动速度
- “ × \times ×” 表示向量叉乘,负号表示力的方向遵循右手定则(与旋转参考系有关)
如果假设振动仅沿 x 轴进行,且陀螺仪绕 z 轴旋转(角速度为
Ω
z
\Omega_z
Ωz),则科氏力在 y 轴上的分量为:
F
C
,
y
=
2
m
Ω
z
v
x
F_{C,y} = 2 m\, \Omega_z\, v_x
FC,y=2mΩzvx
即
Ω
z
=
F
C
,
y
2
m
v
x
\Omega_z\ = \frac{F_{C,y}}{2 m\, v_x}
Ωz =2mvxFC,y
该力会使质量块在 y 方向产生微小位移,通常通过微电容器或其他敏感元件检测这种位移变化,并转换为电信号输出,与旋转角速度 Ω z \Omega_z Ωz 成正比。
3. 示例
假设条件:
- 质量块质量: m = 1 × 1 0 − 6 kg m = 1 \times 10^{-6}\,\text{kg} m=1×10−6kg
- 振动速度: v x = 1 m/s v_x = 1\,\text{m/s} vx=1m/s(这是振动元件在激励状态下的峰值速度)
- 测试旋转角速度: Ω z = 100 rad/s \Omega_z = 100\,\text{rad/s} Ωz=100rad/s
- 信号检测科氏力
当器件绕垂直于振动方向(例如 z 轴)旋转时,科氏力在垂直于振动和旋转轴的方向(例如 y 轴)产生微小位移。这种微小位移通过检测电容变化等方式转换成电信号。
检测到的科氏力对应的信号转换后相当于 F C , y = 2 × 1 0 − 4 N F_{C,y} = 2 \times 10^{-4}\,\text{N} FC,y=2×10−4N
信号校准与处理
利用公式
Ω
z
=
F
C
,
y
2
m
v
x
\Omega_z = \frac{F_{C,y}}{2 m\,v_x}
Ωz=2mvxFC,y
则旋转角速度计算为:
Ω z = 2 × 1 0 − 4 N 2 × 1 × 1 0 − 6 kg × 1 m/s = 100 rad/s \Omega_z = \frac{2 \times 10^{-4}\,\text{N}}{2 \times 1 \times 10^{-6}\,\text{kg} \times 1\,\text{m/s}} = 100\,\text{rad/s} Ωz=2×1×10−6kg×1m/s2×10−4N=100rad/s
检测到的科氏力引起的位移或应变与旋转角速度成正比,经过信号处理后即可输出反映实际旋转角速度的电信号。这个原理使得MEMS陀螺仪能够体积小、功耗低且适合批量生产,广泛应用于惯性导航、姿态控制、消费电子等领域。
4. IMU标定内参和外参
4.1. 标定内容
MEMS 陀螺仪由于制造工艺和环境因素的影响,其输出信号往往包含以下几个误差分量,需要通过标定进行补偿:
-
零偏(Bias)
静止状态下陀螺仪应输出零角速度,但实际会存在一个固定的偏置。标定时需要测量并去除这种零偏。 -
刻度因数(Scale Factor)
表示输出信号与实际旋转角速度之间的比例关系。因工艺误差,不同轴的灵敏度可能不一致,需求得准确的比例系数。 -
非正交性(Cross-axis sensitivity / Misalignment)
理论上三个敏感轴应互相正交,但实际中可能存在一定的夹角误差,导致某一轴受到其他轴信号的干扰。 -
温度效应
温度变化会引起零偏和刻度因数的漂移,标定时通常需要考虑温度补偿或在恒温条件下进行。 -
噪声特性
包括角速率随机游走(ARW)、偏置不稳定性等,通过 Allan 方差分析等方法可以对噪声模型进行估计,为后续滤波提供依据。
4.2. 标定方法
1. 内参标定
a. 静态标定
-
原理
在静止状态下(无外部旋转),理论上陀螺仪输出应为零。通过长时间采集静态数据,可以统计出零偏,并对噪声特性进行分析(例如利用 Allan 方差方法)。 -
步骤
- 将陀螺仪放置在静止平台上,在不同温度下分别采集数据。
- 对采集数据进行均值计算,得到各轴的静态零偏。
- 利用数据方差、Allan 方差等方法分析噪声特性,建立噪声模型。
b. 动态标定
-
原理
动态标定通常利用已知角速度(如转台旋转、地球自转等参考)来标定刻度因数和非正交性。通过提供一个标准旋转输入,再与陀螺仪输出进行比对,利用优化算法求解各个参数。 -
步骤
- 利用转台等装置,在已知角速度下对陀螺仪进行旋转测试。
- 收集输出数据,并构建数学模型,如:
ω meas = S ⋅ ω true + b + n , \omega_{\text{meas}} = S \cdot \omega_{\text{true}} + b + n, ωmeas=S⋅ωtrue+b+n,
其中 S S S 是刻度因数及非正交矩阵, b b b 是零偏, n n n 为噪声。 - 采用非线性最小二乘法或其他优化算法,最小化测量值与标准角速度之间的误差,从而求解 S S S 和 b b b。
c. 示例说明
假设:
- 在动态标定中,已知转台旋转角速度为 ω true = 50 rad/s \omega_{\text{true}} = 50\,\text{rad/s} ωtrue=50rad/s
- 采集到的陀螺仪输出为 ω meas = [ 51.2 , 48.8 , 50.5 ] rad/s \omega_{\text{meas}} = [51.2, 48.8, 50.5]\,\text{rad/s} ωmeas=[51.2,48.8,50.5]rad/s(假设三轴存在零偏和刻度因数误差)
模型构建:
我们假设输出模型为:
ω
meas
=
S
⋅
ω
true
+
b
\omega_{\text{meas}} = S \cdot \omega_{\text{true}} + b
ωmeas=S⋅ωtrue+b
其中:
- S S S 为对角或非对角矩阵(考虑非正交性)
- b b b 为零偏向量
标定过程:
- 通过多次旋转测试,收集多组 ( ω true , ω meas ) \left(\omega_{\text{true}}, \omega_{\text{meas}}\right) (ωtrue,ωmeas) 数据。
- 构建优化问题,使得误差项
min S , b ∑ i ∥ ω meas , i − ( S ⋅ ω true , i + b ) ∥ 2 \min_{S,b} \sum_i \| \omega_{\text{meas},i} - (S \cdot \omega_{\text{true},i} + b) \|^2 S,bmini∑∥ωmeas,i−(S⋅ωtrue,i+b)∥2
达到最小。 - 求解后,可以得到各轴的刻度因数和零偏,从而将实际测量数据进行补偿,输出准确的旋转角速度。
2. 外参标定
1. 基本原理
IMU 与相机分别建立在不同的坐标系下工作,IMU 测量角速度和加速度,而相机采集图像,通过图像处理可以恢复出相机的位姿(即旋转和平移)。标定问题的目标就是求出二者坐标系之间的刚性变换关系,该关系通常可以表示为一个旋转矩阵 R R R 和一个平移向量 t \mathbf{t} t。也就是说,对于一个点在 IMU 坐标系中的坐标 p IMU \mathbf{p}_\text{IMU} pIMU 与其在相机坐标系中的坐标 p cam \mathbf{p}_\text{cam} pcam,它们满足关系:
p cam = R p IMU + t \mathbf{p}_\text{cam} = R\, \mathbf{p}_\text{IMU} + \mathbf{t} pcam=RpIMU+t
2. 公式推导
假设有两个坐标系:
- IMU 坐标系:记为 I I I
- 相机坐标系:记为 C C C
二者之间的刚性变换可写成齐次变换矩阵形式:
X = [ R C I t C I 0 T 1 ] X = \begin{bmatrix} R_{CI} & \mathbf{t}_{CI} \\ \mathbf{0}^T & 1 \end{bmatrix} X=[RCI0TtCI1]
其中, R C I R_{CI} RCI 表示从 IMU 坐标系到相机坐标系的旋转, t C I \mathbf{t}_{CI} tCI 表示平移。
对于某个在 IMU 坐标系下的点 p I \mathbf{p}_I pI(在齐次坐标下为 [ p I 1 ] \begin{bmatrix}\mathbf{p}_I\\1\end{bmatrix} [pI1]),其在相机坐标系中的表达为:
[ p C 1 ] = X [ p I 1 ] = [ R C I p I + t C I 1 ] \begin{bmatrix} \mathbf{p}_C \\ 1 \end{bmatrix} = X \begin{bmatrix} \mathbf{p}_I \\ 1 \end{bmatrix} = \begin{bmatrix} R_{CI}\, \mathbf{p}_I + \mathbf{t}_{CI} \\ 1 \end{bmatrix} [pC1]=X[pI1]=[RCIpI+tCI1]
- 基于运动对求解标定参数
在实际标定中,可以利用多个时刻的观测数据来构造方程。假设系统经历了两组运动,对应的 IMU 和相机相对运动分别记为 B i B_i Bi 和 A i A_i Ai,那么有经典的 Hand-eye 校准模型:
A i X = X B i , i = 1 , 2 , … , n A_i\, X = X\, B_i,\quad i=1,2,\ldots,n AiX=XBi,i=1,2,…,n
其中:
-
A i A_i Ai 为相机测量的相对变换(由图像位姿计算得到),形式为:
A i = [ A i R A i t 0 T 1 ] A_i = \begin{bmatrix} A_{iR} & \mathbf{A}_{it} \\ \mathbf{0}^T & 1 \end{bmatrix} Ai=[AiR0TAit1]
-
B i B_i Bi 为 IMU 测量的相对变换(通过积分获得),形式为:
B i = [ B i R B i t 0 T 1 ] B_i = \begin{bmatrix} B_{iR} & \mathbf{B}_{it} \\ \mathbf{0}^T & 1 \end{bmatrix} Bi=[BiR0TBit1]
-
X X X 为从 IMU 到相机的未知变换,即:
X = [ X R X t 0 T 1 ] X = \begin{bmatrix} X_R & X_t \\ \mathbf{0}^T & 1 \end{bmatrix} X=[XR0TXt1]
该式可以拆分为旋转部分和平移部分:
-
旋转部分:
A i R X R = X R B i R A_{iR}\, X_R = X_R\, B_{iR} AiRXR=XRBiR
-
平移部分:
A i R X t + A i t = X R B i t + X t A_{iR}\, X_t + \mathbf{A}_{it} = X_R\, \mathbf{B}_{it} + X_t AiRXt+Ait=XRBit+Xt
利用多个运动对,可以使用最小二乘法或其他优化方法来分别求解 X R X_R XR 与 X t X_t Xt。
3. 分步骤解析
- 步骤 1:数据采集
- 图像数据:采集一系列图像,通过棋盘格等标定板计算出相机的位姿变化,得到相机相对运动 A i A_i Ai。
- IMU 数据:同时采集 IMU 的加速度与角速度数据,经过积分得到 IMU 相对运动 B i B_i Bi。
- 步骤 2:数据配对
- 对于每一次运动,提取相机和 IMU 对应时刻的相对变换 A i A_i Ai 与 B i B_i Bi,要求二者的时间戳同步或者经过时间校准。
- 步骤 3:旋转矩阵求解
- 利用公式 A i R X R = X R B i R A_{iR}\, X_R = X_R\, B_{iR} AiRXR=XRBiR 对所有运动对构建方程组。
- 采用 SVD 分解或其他迭代优化方法求解 X R X_R XR。
- 步骤 4:平移向量求解
-
在已知 X R X_R XR 的情况下,将平移部分方程
A i R X t + A i t = X R B i t + X t A_{iR}\, X_t + \mathbf{A}_{it} = X_R\, \mathbf{B}_{it} + X_t AiRXt+Ait=XRBit+Xt
转化为关于 X t X_t Xt 的线性方程组,利用最小二乘方法求解。
- 步骤 5:优化与验证
-
构造整体误差函数(如重投影误差或变换误差),对 X R X_R XR 与 X t X_t Xt 进行全局优化。
-
利用部分数据进行交叉验证,检查求解的标定参数是否满足实际需求。
-
一种构造误差函数的方式是衡量每一对运动对下的残差,即
e i = A i X − X B i . e_i = A_i\, X - X\, B_i. ei=AiX−XBi.
由于 e i e_i ei 是一个矩阵,我们常用其 Frobenius 范数来衡量误差的大小,整体误差函数可以定义为
E ( X ) = ∑ i = 1 n ∥ A i X − X B i ∥ F 2 . E(X) = \sum_{i=1}^n \|A_i\, X - X\, B_i\|_F^2. E(X)=i=1∑n∥AiX−XBi∥F2.
最优的 X X X 应使得 E ( X ) E(X) E(X) 尽可能接近零,这表明所求的标定参数能够较好地描述 IMU 与相机之间的转换关系。
4. 示例
假设在实验中采集到一组运动数据,得到了以下变换矩阵(为便于理解,此处示例数值简化处理):
相机的运动变换矩阵 A 1 A_1 A1
A 1 = [ 0.99 − 0.05 0.10 0.20 0.06 0.98 − 0.15 0.10 − 0.10 0.16 0.98 0.30 0 0 0 1 ] A_1 = \begin{bmatrix} 0.99 & -0.05 & 0.10 & 0.20 \\[4mm] 0.06 & 0.98 & -0.15 & 0.10 \\[4mm] -0.10 & 0.16 & 0.98 & 0.30 \\[4mm] 0 & 0 & 0 & 1 \end{bmatrix} A1= 0.990.06−0.100−0.050.980.1600.10−0.150.9800.200.100.301
IMU 的运动变换矩阵 B 1 B_1 B1
B 1 = [ 0.98 − 0.06 0.15 0.18 0.07 0.97 − 0.20 0.12 − 0.15 0.18 0.96 0.35 0 0 0 1 ] B_1 = \begin{bmatrix} 0.98 & -0.06 & 0.15 & 0.18 \\[4mm] 0.07 & 0.97 & -0.20 & 0.12 \\[4mm] -0.15 & 0.18 & 0.96 & 0.35 \\[4mm] 0 & 0 & 0 & 1 \end{bmatrix} B1= 0.980.07−0.150−0.060.970.1800.15−0.200.9600.180.120.351
利用多个运动数据构建 A i X = X B i A_i\, X = X\, B_i AiX=XBi 方程后,通过 SVD 求解得到 IMU 到相机的旋转矩阵和位移向量,例如:
求得的旋转矩阵 X R X_R XR
X R = [ 0.995 − 0.030 0.100 0.040 0.998 − 0.050 − 0.100 0.060 0.993 ] X_R = \begin{bmatrix} 0.995 & -0.030 & 0.100 \\[4mm] 0.040 & 0.998 & -0.050 \\[4mm] -0.100 & 0.060 & 0.993 \end{bmatrix} XR= 0.9950.040−0.100−0.0300.9980.0600.100−0.0500.993
求得的平移向量 X t X_t Xt
X t = [ 0.05 0.02 0.10 ] X_t = \begin{bmatrix} 0.05 \\[4mm] 0.02 \\[4mm] 0.10 \end{bmatrix} Xt= 0.050.020.10
因此,IMU 到相机的整体刚性变换矩阵 X X X 为:
X = [ 0.995 − 0.030 0.100 0.05 0.040 0.998 − 0.050 0.02 − 0.100 0.060 0.993 0.10 0 0 0 1 ] X = \begin{bmatrix} 0.995 & -0.030 & 0.100 & 0.05 \\[4mm] 0.040 & 0.998 & -0.050 & 0.02 \\[4mm] -0.100 & 0.060 & 0.993 & 0.10 \\[4mm] 0 & 0 & 0 & 1 \end{bmatrix} X= 0.9950.040−0.1000−0.0300.9980.06000.100−0.0500.99300.050.020.101
这表示任意一个在 IMU 坐标系下的点 p IMU \mathbf{p}_\text{IMU} pIMU 都可以通过
p cam = X R p IMU + X t \mathbf{p}_\text{cam} = X_R\, \mathbf{p}_\text{IMU} + X_t pcam=XRpIMU+Xt
转换到相机坐标系中。


















 2724
2724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









