







引言
- 本文是使用pytorch对卷积神经网络(Convolutional Neural Network, CNN)的代码实现,作为之前介绍CNN原理的一个代码补充。
- 本文代码相关介绍相对较为详细,也为自己的一个学习过程,有错误的地方欢迎指正。
- 本人介绍CNN原理的链接:CNN原理介绍1
CNN原理介绍2
简述CNN结构
- 为方便理解,如下图所示(详细介绍看上方链接)
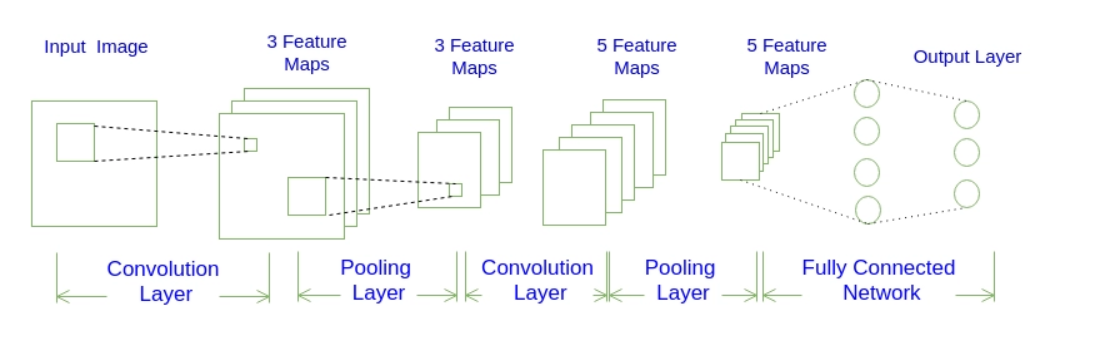
- 结构:一个卷积神经网络由若干卷积层、Pooling层、全连接层组成
- 流程通俗理解(卷积):输入图片通过卷积核提取特征参数Feature Maps,此为卷积层的操作;
- 流程通俗理解(池化):得到的特征参数经过池化层进行化简减少参数量,此为池化层的操作
- 流程通俗理解(全连接):将最终提取到的特征信息输入到全连接神经网络进行计算
- 上面图中一张图变成了3张Feature Maps是因为Feature Maps数量跟图片通道数有关,卷积核也同样是对应的,一个通道对应一个卷积核
- 具体名称的介绍可以见:名称介绍
完整流程:
step1 导入需要的包
import torch
import torch.nn as nn
import torch.utils.data as Data
from torch.autograd import Variable
import torchvision # pytorch的一个视觉处理工具包(需单独安装)
- PyTorch中主要的包
- torch.nn :包含用于构建神经网络的模块和可扩展类的子包。
- torch.autograd :支持PyTorch中所有的可微张量运算的子包
- torch.nn.functional :一种功能接口,包含用于构建神经网络的典型操作,如损失函数、激活函数和卷积运算
- torch.optim :包含标准优化操作(如SGD和Adam)的子包。
- torch.utils :工具包,包含数据集和数据加载程序等实用程序类的子包,使数据预处理更容易
- torchvision :一个提供对流行数据集、模型架构和计算机视觉图像转换的访问的软件包
- 这些包可能代码中并未用到;参考资料1
step2 数据预处理
首先是关于将数据转换成tensor的原因
- Tensor的意义:Tensor之于PyTorch就好比是array之于Numpy或者DataFrame之于Pandas,都是构建了整个框架中最为底层的数据结构;
- Tensor的区别:Tensor又与普通的数据结构不同,具有一个极为关键的特性——自动求导而且它表示一个多维矩阵,在计算方面还可以在GPU上使用以加速计算.
- PyTorch中对于数据集的处理有三个非常重要的类:Dataset、Dataloader、Sampler,它们均是 torch.utils.data 包下的模块(类)
- Dataloader是数据的加载类,它是对于Dataset和Sampler的进一步包装,用于实际读取数据,可以理解为它是这个工作的真正实践者。参考资料2
关于torchvision中的数据集
- torchvision中datasets中所有封装的数据集都是torch.utils.data.Dataset的子类,它们都可以用torch.utils.data.DataLoader进行数据加载。以datasets.MNIST类为例,具体参数和用法如下所示:
CLASS torchvision.datasets.MNIST(
root: str,
train: bool = True,
transform: Optional[Callable] = None,
target_transform: Optional[Callable] = None,
download: bool = False
)
- root (string): 表示数据集的根目录,其中根目录存在MNIST/processed/training.pt和MNIST/processed/test.pt的子目录(其实就是对下载的文件指定位置)
- train (bool, optional): 如果为True,则从training.pt创建数据集,否则从test.pt创建数据集
- download (bool, optional): 如果为True,则从internet下载数据集并将其放入根目录。如果数据集已下载,则不会再次下载
- transform (callable, optional): 接收PIL图片并返回转换后版本图片的转换函数(就是把图片或者numpy中的数组转换成tensor)
- target_transform (callable, optional): 接收PIL接收目标并对其进行变换的转换函数
- 具体参考:参考资料3
什么是Variable?
- variable是tensor的封装,在神经网络中,常需要反向传播这些的,所以需要各个节点是连接在一起的,是个计算图,tensor的数据格式就好比星星之火,但是无法汇聚一起;等变成variable之后就可以慢慢燎原了。
- 关于Variable
代码分析
- Data.DataLoader:加载数据
- shuffle:表示打乱数据顺序
- torch.unsqueeze:个人理解就是改变数据shape,此处就是把训练数据本来是一维的给"竖"起来作为一条一条数据进行训练(等以后我想起来更通俗的再修改,具体函数用法看下面参考资料)
step3 定义网络结构
- Net需要继承自nn.Module,通过super(python中的超类)完成父类的初始化,个人理解类比于python中定义类要继承Object类,这样很多基础定义就可以略去了
- nn.Module是nn中十分重要的类,包含网络各层的定义及forward方法参考资料6
- nn.Sequential返回的是一个序列容器用于搭建神经网络的模块,按照被传入构造器的顺序添加到nn.Sequential()容器中,比如con1中就是进行封装先进行第一层的卷积和池化,conv2同理,然后定义前向传播(注意是卷积两次) 参考资料7
- nn.Conv2d: 在Pytorch的nn模块中,封装了nn.Conv2d()类作为二维卷积的实现,二维卷积应该是最常用的卷积方式了 参考资料8
关于网络结构中流程梳理
-
关于卷积层nn.Conv2d中的参数介绍:in_channels 输入图片的通道数,同理out_channels为输出图片的通道数(都为自定义的,我搜集资料看到有1,3,16,32等等);kernel_size为卷积核大小,5 * 5可以直接简写,如果是3 * 5就要写成元组的形式;stride为卷积核移动的步长;padding为填充的大小,具体意义可见文章顶部原理介绍
-
nn.ReLU()为激活函数,使用ReLU激活函数有解决梯度消失的作用(具体作用看文章顶部原理中有介绍)
-
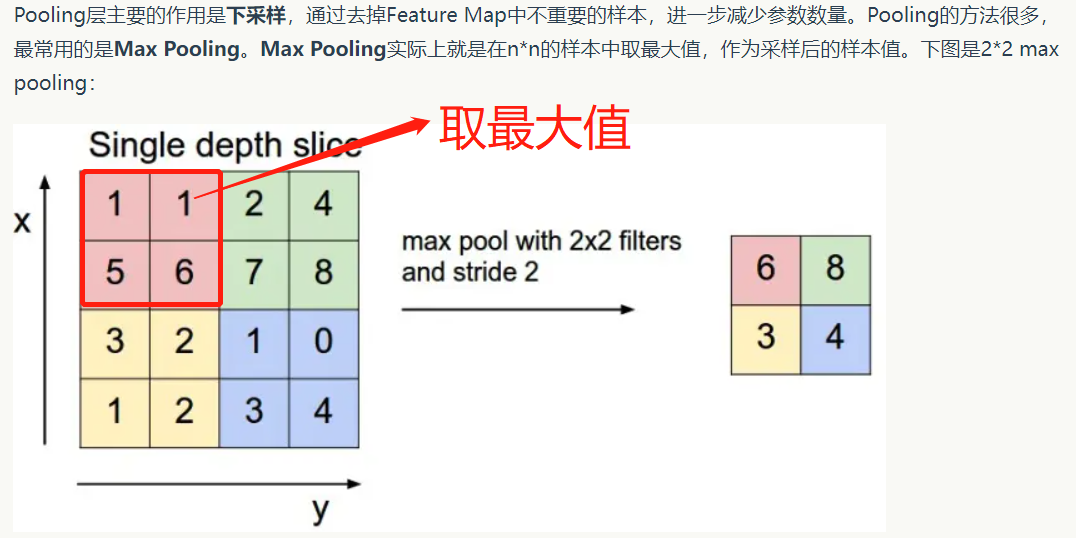
nn.MaxPool2d:maxpooling有局部不变性而且可以提取显著特征的同时降低模型的参数,从而降低模型的过拟合,具体操作看下图,除了最大值,还可以取平均值
-
nn.Linear主要是用于全连接层 参考资料8
-
x.view()就是对tensor进行reshape:参考资料9
-
关于卷积时候图片size的变化
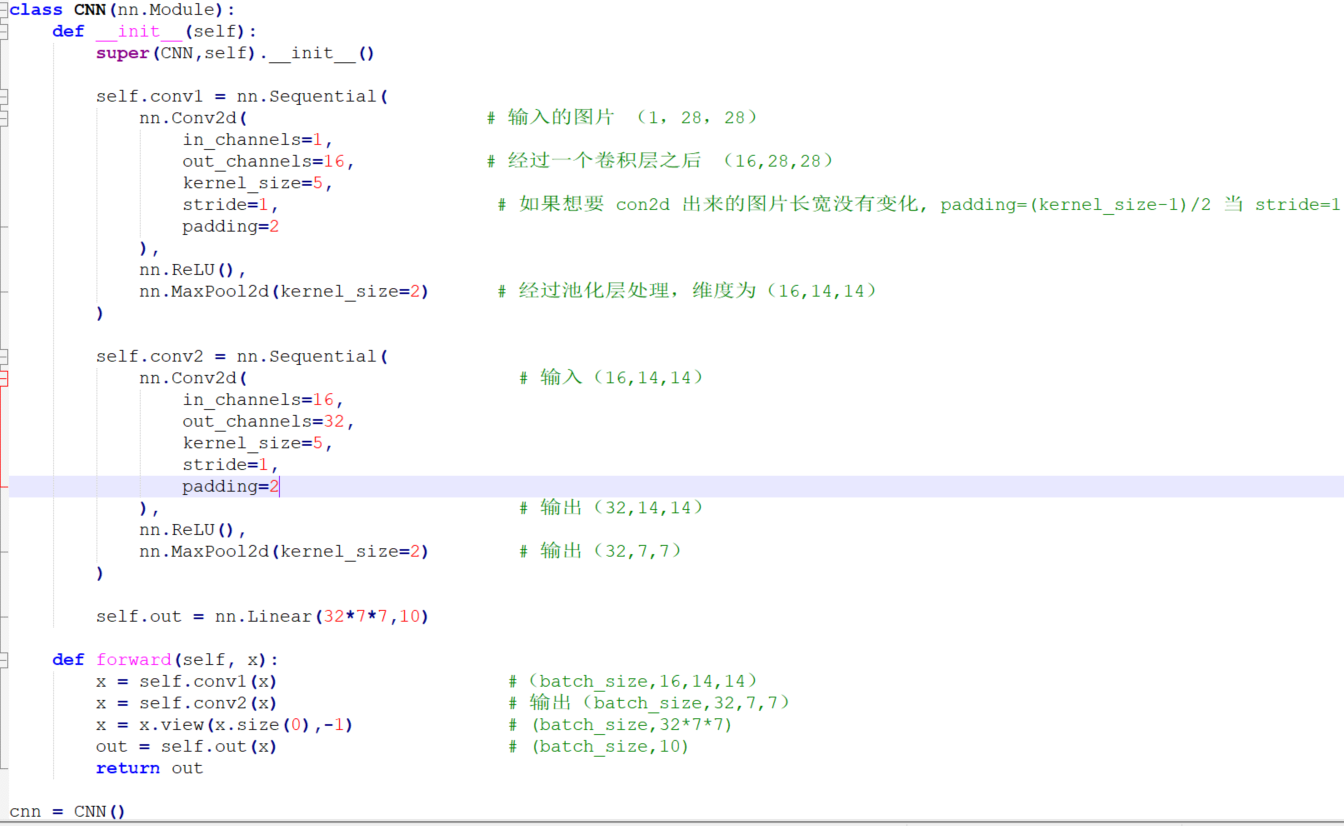
- 首先输入通道为1,尺寸大小为28 * 28,即(1,28,28)
- 经过卷积后因为自定义输出通道为16,那么尺寸为(16,28,28)
- 经过池化层,因为卷积核是2 * 2的,所以尺寸降低为(16,14,14)
- 继续conv2卷积,池化后就尺寸变成了(32,7,7)
- nn.Linear具体用法(10是因为这个识别结果是0-9,为10个类别):参考资料10
-
关于输出尺寸的计算公式
- O = (I - K + 2P)/ S +1
- I输入尺寸,K是卷积核大小,P是padding大小,S是步长
step4 训练模型
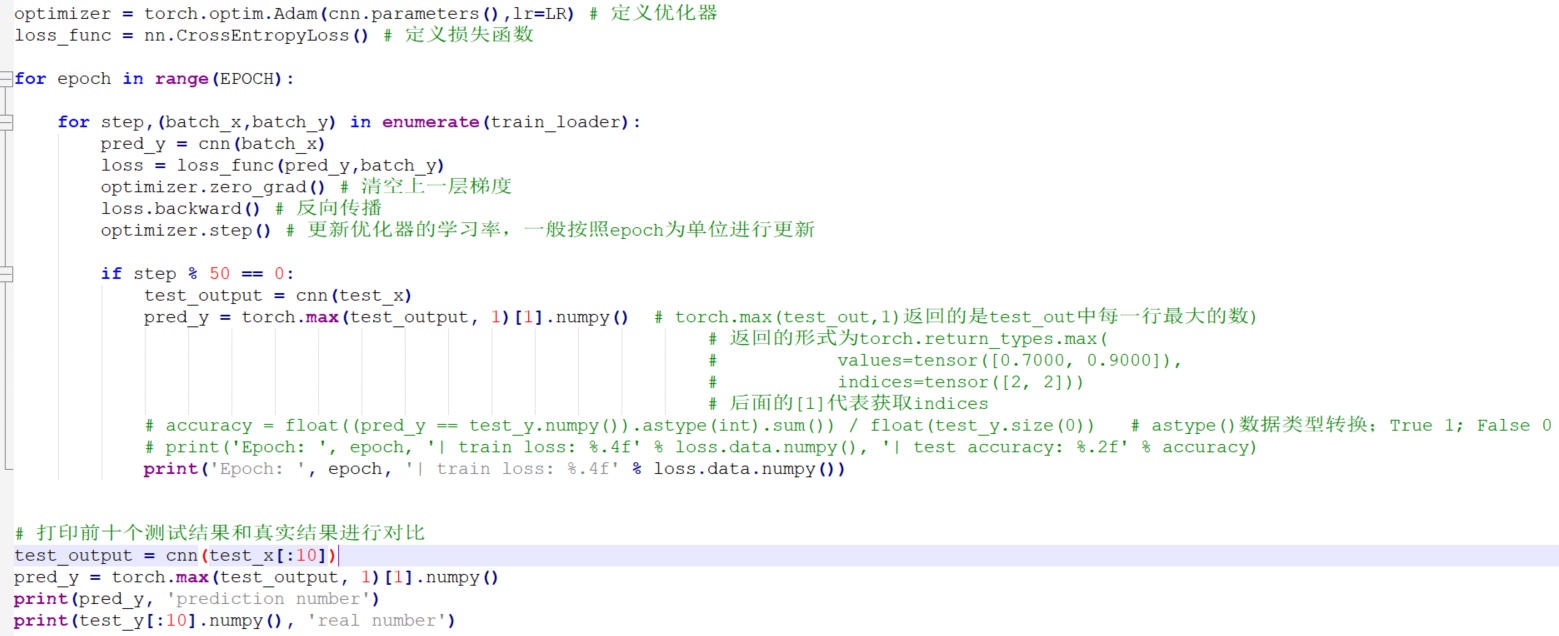
- 关于优化器torch.optim.Adam,个人也还不是特别理解详细的作用,此处待补充链接
- 交叉熵损失函数(适合分类模型): 个人之前的总结
- optimizer.zero_grad()关于优化器清空上层的梯度
- loss.backward()反向传播上面介绍Variable的时候已经讲过,已经封装好了(看CNN原理部分反向传播求各个参数不同层级参数的偏导求得相似,结果在这里只需要调用api…)
- torch.max 通俗讲就是返回列表中最大的数,具体用法可以见最下方html文件
完整代码
import torch
import torch.nn as nn
import torchvision
import torch.utils.data as Data
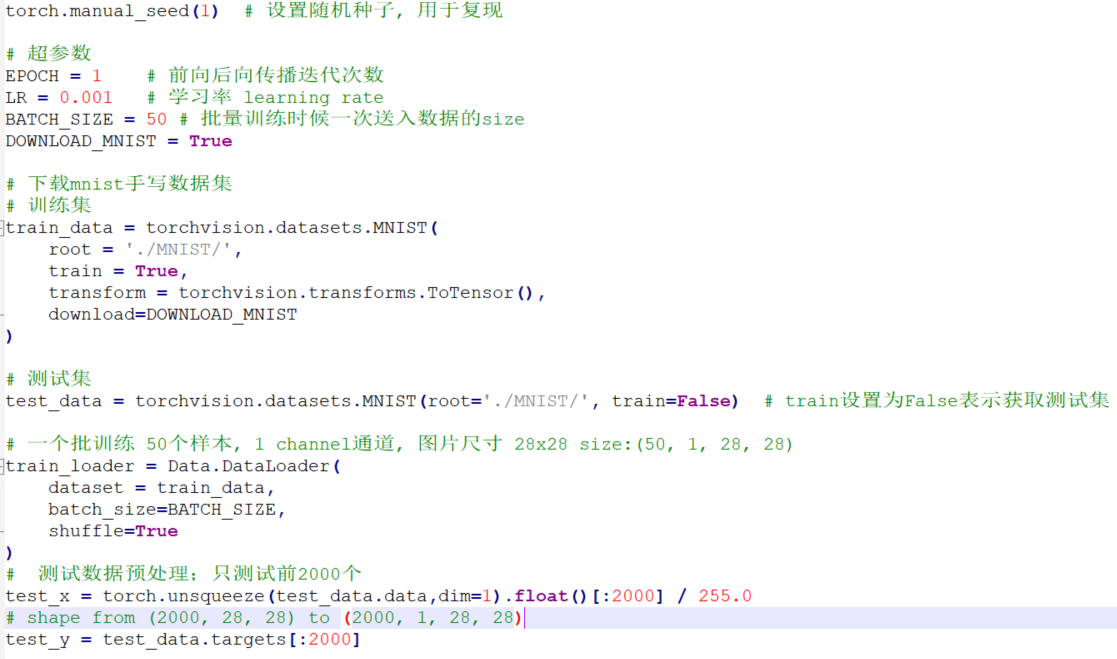
torch.manual_seed(1) # 设置随机种子, 用于复现
# 超参数
EPOCH = 1 # 前向后向传播迭代次数
LR = 0.001 # 学习率 learning rate
BATCH_SIZE = 50 # 批量训练时候一次送入数据的size
DOWNLOAD_MNIST = True
# 下载mnist手写数据集
# 训练集
train_data = torchvision.datasets.MNIST(
root = './MNIST/',
train = True,
transform = torchvision.transforms.ToTensor(),
download=DOWNLOAD_MNIST
)
# 测试集
test_data = torchvision.datasets.MNIST(root='./MNIST/', train=False) # train设置为False表示获取测试集
# 一个批训练 50个样本, 1 channel通道, 图片尺寸 28x28 size:(50, 1, 28, 28)
train_loader = Data.DataLoader(
dataset = train_data,
batch_size=BATCH_SIZE,
shuffle=True
)
# 测试数据预处理;只测试前2000个
test_x = torch.unsqueeze(test_data.data,dim=1).float()[:2000] / 255.0
# shape from (2000, 28, 28) to (2000, 1, 28, 28)
test_y = test_data.targets[:2000]
class CNN(nn.Module):
def __init__(self):
super(CNN,self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d( # 输入的图片 (1,28,28)
in_channels=1,
out_channels=16, # 经过一个卷积层之后 (16,28,28)
kernel_size=5,
stride=1, # 如果想要 con2d 出来的图片长宽没有变化, padding=(kernel_size-1)/2 当 stride=1
padding=2
),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2) # 经过池化层处理,维度为(16,14,14)
)
self.conv2 = nn.Sequential(
nn.Conv2d( # 输入(16,14,14)
in_channels=16,
out_channels=32,
kernel_size=5,
stride=1,
padding=2
), # 输出(32,14,14)
nn.ReLU(),
nn.MaxPool2d(kernel_size=2) # 输出(32,7,7)
)
self.out = nn.Linear(32*7*7,10)
def forward(self, x):
x = self.conv1(x) #(batch_size,16,14,14)
x = self.conv2(x) # 输出(batch_size,32,7,7)
x = x.view(x.size(0),-1) # (batch_size,32*7*7)
out = self.out(x) # (batch_size,10)
return out
cnn = CNN()
optimizer = torch.optim.Adam(cnn.parameters(),lr=LR) # 定义优化器
loss_func = nn.CrossEntropyLoss() # 定义损失函数
for epoch in range(EPOCH):
for step,(batch_x,batch_y) in enumerate(train_loader):
pred_y = cnn(batch_x)
loss = loss_func(pred_y,batch_y)
optimizer.zero_grad() # 清空上一层梯度
loss.backward() # 反向传播
optimizer.step() # 更新优化器的学习率,一般按照epoch为单位进行更新
if step % 50 == 0:
test_output = cnn(test_x)
pred_y = torch.max(test_output, 1)[1].numpy() # torch.max(test_out,1)返回的是test_out中每一行最大的数)
# 返回的形式为torch.return_types.max(
# values=tensor([0.7000, 0.9000]),
# indices=tensor([2, 2]))
# 后面的[1]代表获取indices
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy())
# 打印前十个测试结果和真实结果进行对比
test_output = cnn(test_x[:10])
pred_y = torch.max(test_output, 1)[1].numpy()
print(pred_y, 'prediction number')
print(test_y[:10].numpy(), 'real number')
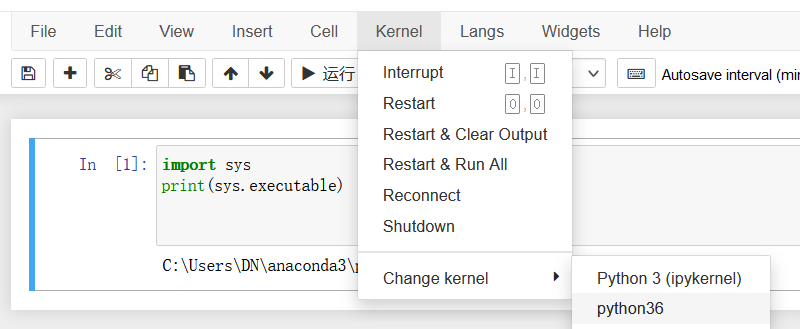
补充一个测试过程掌握的小tips
- 比如使用anaconda中的jupyter测试,但是anaconda中又很多虚拟环境,怎么将jupyter切换到测试用的虚拟环境呢
- 需要注册,具体参考: 参考资料14
- 比如我创建CNN测试环境是名称是python36,而默认是python3也就是base环境,按照上述安装并注册后就可以切换啦
附件
- 测试CNN代码的详细步骤html文件
- GitHub上资源(html文件自己下载用浏览器打开)
- csdn资源(这个我设置确实是免费,貌似下载还是要收费)


















 22万+
22万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











