







简述
boosted Tree算法简要描述:
不断地添加树,不断地进行特征分裂来生长一棵树。每次添加一个树,其实是学习一个新函数,去拟合上次预测的残差。一个树在生长的过程中,挑选一个最佳特征的最佳分裂点,来进行特征分裂。
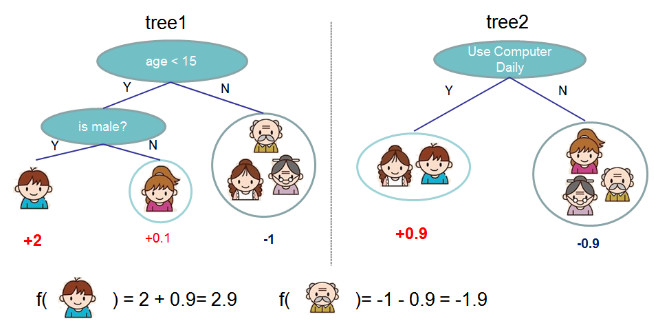
训练后会得到的模型是多棵树,每棵树有若干叶子节点,每个叶子节点对一个分数,假如来了一个样本,根据这个样本的特征,在每棵树上会落到对应一个叶子节点,总分数就是把落到的叶子节点的分数加起来,作为预测值。
理论推导
决策树
决策树的基础就不再赘述了。下面是一个推测一个人是否喜欢玩游戏的树的例子,结构如下:
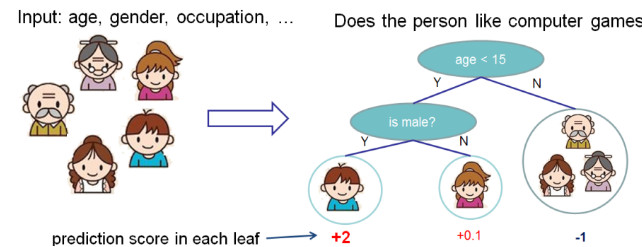
但一棵树的决策能力通常是不够强的,我们就使用多棵树预测值的和做最后的决策。
这就可以看出多个决策树 complement 的模型和目标函数了。
模型和目标函数
模型:
y
i
^
=
∑
k
=
1
K
f
k
(
x
i
)
,
f
k
∈
F
\hat{y_i} = \sum _ {k=1}^K f_k (x_i), f_k \in \mathcal{F}
yi^=k=1∑Kfk(xi),fk∈F
其中 K 为 树的个数,$ \mathcal{F}$ 是 所有可能的 classification and regression trees (CART)集合。
目标函数:
O
b
j
=
∑
i
=
1
n
l
(
y
i
,
y
i
^
)
+
∑
k
=
1
K
Ω
(
f
k
)
Obj = \sum _{i=1}^n l(y_i, \hat{y_i} ) + \sum _{k=1} ^K \Omega{(f_k)}
Obj=i=1∑nl(yi,yi^)+k=1∑KΩ(fk)
其中,目标函数的第一项为训练损失,第二项为 树的复杂度(complexity of the Trees)
我们的模型是要学习 K 棵树,每次去拟合上一次的学习的残差。跟传统的有监督算法一样,目标函数有损失函数和正则项组成。与传统决策树不同的是,传统的决策树每次决策时 Heuristic (启发式) 的,比如 信息增益;而对于 boosted tree,每次决策都是 Objective 目标性质的,即与目标函数有关。
Additive Training
首先,我们要知道树的参数是什么? 我们可以发现需要学习函数
f
k
f_k
fk ,它包含一棵树的结构和叶子的分数。学习树的结构是很复杂的,不像那些简单的优化问题可以很容易地得到梯度。一次性求解所有树是不可能的。因此我们使用“增加”策略:从一个预测常数开始,每次增加一个新函数。
y
i
^
(
0
)
=
0
y
i
^
(
1
)
=
f
1
(
x
i
)
=
y
i
^
(
0
)
+
f
1
(
x
i
)
y
i
^
(
2
)
=
f
1
(
x
i
)
+
f
2
(
x
i
)
=
y
i
^
(
1
)
+
f
2
(
x
i
)
.
.
.
y
i
^
(
t
)
=
∑
k
=
1
t
f
k
(
x
i
)
=
y
i
^
(
t
−
1
)
+
f
t
(
x
i
)
\hat{y_i} ^{(0)} = 0 \\ \hat{y_i} ^{(1)} = f_1 (x_i) = \hat{y_i} ^{(0)} + f_1 (x_i) \\ \hat{y_i} ^{(2)} = f_1 (x_i) + f_2 (x_i) = \hat{y_i} ^{(1)} + f_2 (x_i) \\ ... \\ \hat{y_i} ^{(t)} = \sum_{k=1} ^ t f_k (x_i) = \hat{y_i} ^{(t-1)} + f_t (x_i) \\
yi^(0)=0yi^(1)=f1(xi)=yi^(0)+f1(xi)yi^(2)=f1(xi)+f2(xi)=yi^(1)+f2(xi)...yi^(t)=k=1∑tfk(xi)=yi^(t−1)+ft(xi)
可以看到,每一轮新的预测,都是上一次的预测值 + 本次学习的函数。
把最新的一次预测拆分为 上次预测值 + 本次学习的函数,即$\hat{y_i} ^{(t)} = \hat{y_i} ^{(t-1)} + f_t (x_i) $ ,则目标函数为:
O
b
j
=
∑
i
=
1
n
l
(
y
i
,
y
i
^
)
+
∑
k
=
1
K
Ω
(
f
k
)
=
∑
i
=
1
n
l
[
y
i
,
y
i
^
(
t
−
1
)
+
f
t
(
x
i
)
]
+
Ω
(
f
t
)
+
c
o
n
s
t
a
n
t
Obj = \sum _{i=1}^n l(y_i, \hat{y_i} ) + \sum _{k=1} ^K \Omega{(f_k)} \\ = \sum _{i=1}^n l[y_i, \hat{y_i} ^{(t-1)} + f_t (x_i) ] + \Omega{(f_t)} + constant
Obj=i=1∑nl(yi,yi^)+k=1∑KΩ(fk)=i=1∑nl[yi,yi^(t−1)+ft(xi)]+Ω(ft)+constant
目标函数中,目标值和上次预测值都是已知的,那么唯一要求的是新的函数
f
t
f_t
ft ,使目标函数最小,即
∑
i
=
1
n
l
[
y
i
,
y
i
^
(
t
−
1
)
+
f
t
(
x
i
)
]
+
Ω
(
f
t
)
\sum _{i=1}^n l[y_i, \hat{y_i} ^{(t-1)} + f_t (x_i) ] + \Omega{(f_t)}
∑i=1nl[yi,yi^(t−1)+ft(xi)]+Ω(ft) 最小。
如果我们使用均方误差(MSE)作为损失函数,那么目标函数可以写为:
KaTeX parse error: No such environment: split at position 8: \begin{̲s̲p̲l̲i̲t̲}̲\text{obj}^{(t)…
MSE作为损失函数是很友好的,它包含一次项(通常称为残差 residual)和二次项。我们通常对目标函数进行泰勒展开,取到二次项
根据泰勒展开对目标函数进行变形,并取前两项:
obj
(
t
)
=
∑
i
=
1
n
[
l
(
y
i
,
y
^
i
(
t
−
1
)
)
+
g
i
f
t
(
x
i
)
+
1
2
h
i
f
t
2
(
x
i
)
]
+
Ω
(
f
t
)
+
c
o
n
s
t
a
n
t
\text{obj}^{(t)} = \sum_{i=1}^n [l(y_i, \hat{y}_i^{(t-1)}) + g_i f_t(x_i) + \frac{1}{2} h_i f_t^2(x_i)] + \Omega(f_t) + \mathrm{constant}
obj(t)=i=1∑n[l(yi,y^i(t−1))+gift(xi)+21hift2(xi)]+Ω(ft)+constant
其中
KaTeX parse error: No such environment: split at position 8: \begin{̲s̲p̲l̲i̲t̲}̲g_i &= \partial…
可以看到,现在的目标函数的已知部分是:
- 上次预测的损失函数对应函数值
- 上次预测的损失函数的一级偏导数对应函数值
- 上次预测的损失函数的二级偏导数对应函数值
去掉已知项,目标函数变为:
∑
i
=
1
n
[
g
i
f
t
(
x
i
)
+
1
2
h
i
f
t
2
(
x
i
)
]
+
Ω
(
f
t
)
\sum_{i=1}^n [g_i f_t(x_i) + \frac{1}{2} h_i f_t^2(x_i)] + \Omega(f_t)
i=1∑n[gift(xi)+21hift2(xi)]+Ω(ft)
这一些值根据上次预测结果可以求出来,唯一未知的就是新函数。而我们这里,是用一个棵树表示一个函数,每个叶子节点的输出值就是函数值,可枚举的。我们的目标就是把这些叶子节点的输出值求出来,使得目标最优。
模型的正则项
到此,我们还有一个重要的工作,即加上正则项,即定义树的复杂度
Ω
(
f
)
\Omega(f)
Ω(f) ,为此,我们细化树的定义为:
f
t
(
x
)
=
w
q
(
x
)
,
w
∈
R
T
,
q
:
R
d
→
{
1
,
2
,
⋯
 
,
T
}
.
f_t(x) = w_{q(x)}, w \in R^T, q:R^d\rightarrow \{1,2,\cdots,T\} .
ft(x)=wq(x),w∈RT,q:Rd→{1,2,⋯,T}.
这里
w
w
w 是叶子上的分数向量,
q
q
q 是将每个数据点分配给相应叶子的函数,
T
T
T 是叶子的总数。XGBoost中,第一正则项为:
Ω
(
f
)
=
γ
T
+
1
2
λ
∑
j
=
1
T
w
j
2
\Omega(f) = \gamma T + \frac{1}{2}\lambda \sum_{j=1}^T w_j^2
Ω(f)=γT+21λj=1∑Twj2
有不止一种的正则项定义方式,但上述这种 work 很好。
模型完整体
KaTeX parse error: No such environment: split at position 8: \begin{̲s̲p̲l̲i̲t̲}̲\text{obj}^{(t)…
这里
I
j
=
{
i
∣
q
(
x
i
)
=
j
}
I_j = \{i | q(x_i) = j \}
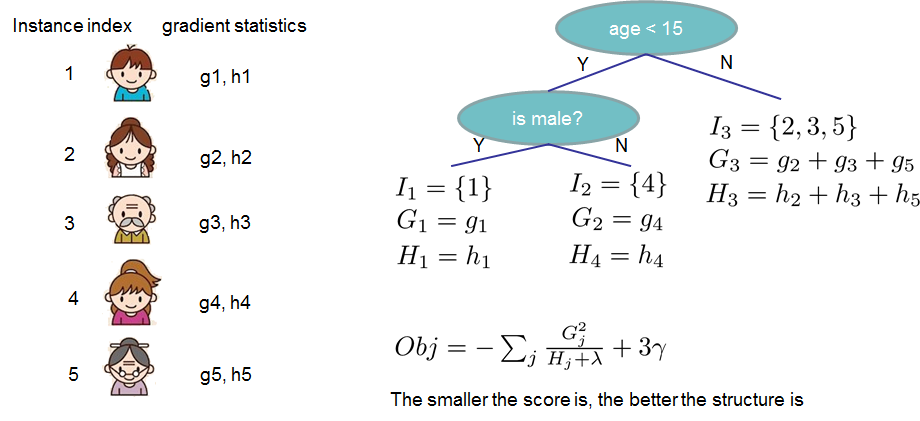
Ij={i∣q(xi)=j} 是分配给第j个叶子的数据点索引集 ,注意公式第二行,我们家欢乐求和索引,这是因为所有数据点在同一个叶子上的分数相同。再引入
G
j
=
∑
i
∈
I
j
g
i
G_j = \sum_{i\in I_j} g_i
Gj=∑i∈Ijgi 和
H
j
=
∑
i
∈
I
j
h
i
H_j = \sum_{i\in I_j} h_i
Hj=∑i∈Ijhi ,目标函数可写为:
obj
(
t
)
=
∑
j
=
1
T
[
G
j
w
j
+
1
2
(
H
j
+
λ
)
w
j
2
]
+
γ
T
\text{obj}^{(t)} = \sum^T_{j=1} [G_jw_j + \frac{1}{2} (H_j+\lambda) w_j^2] +\gamma T
obj(t)=j=1∑T[Gjwj+21(Hj+λ)wj2]+γT
这个公式中,
w
j
w_j
wj 是相互独立的,且目标函数的形式是二次的,对于一个给定的结构,最好的
w
j
w_j
wj 和 最小的损失为:
KaTeX parse error: No such environment: split at position 8: \begin{̲s̲p̲l̲i̲t̲}̲w_j^\ast &= -\f…
第二个公式用于评估树结构
q
(
x
)
q(x)
q(x) 的好坏。
这些听起来有点复杂,让我们通过一个例子看看如何计算得分。 基本上,对于给定的树结构,我们将统计数据 g i g_i gi 和 h i h_i hi 推送到它们所属的叶子,将统计数据加在一起,并使用公式计算树的有效性。 这个分数就像决策树中的杂质度量,除了它还考虑了模型的复杂性。如下:
参考链接
https://xgboost.readthedocs.io/en/latest/tutorials/model.html















 4428
4428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









