









1.简介
很多情况下,我们调用优化器的时候都不清楚里面的原理和构造,主要基于自己数据集和模型的特点,然后再根据别人的经验来选择或者尝试优化器。下面分别对SGD的原理、pytorch代码进行介绍和解析。
2.梯度下降
梯度下降方法可以分为3种,分别是:
- BGD (Batch gradient descent)
这种方法是最朴素的梯度下降方法,将全部的数据样本输入网络计算梯度后进行一次更新:
其中 为模型参数,
为模型参数更新梯度,
为学习率。
这个方法的最大问题就是容易落入局部最优点或者鞍点。
局部最优点很好理解,就是梯度在下降过程中遇到下图的情况,导致在local minimum区间不断震荡最终收敛。
鞍点(saddle point)是指一个非局部极值点的驻点,如下图所示,长得像一个马鞍因此得名。以红点的位置来说,在x轴方向是一个向上弯曲的曲线,在y轴方向是一个向下弯曲的曲线。当点从x轴方向向下滑动时,最终也会落入鞍点,导致梯度为0。

- SGD (Stochastic gradient descent)
为了解决BGD落入鞍点或局部最优点的问题,SGD引入了随机性,即将每个数据样本输入网络计算梯度后就进行一次更新:
其中 为模型参数,
为一个样本输入后的模型参数更新梯度,
为学习率。
由于要对每个样本都单独计算梯度,那么相当于引入了许多噪声,梯度下降时就会跳出鞍点和局部最优点。但要对每个样本都计算一次梯度就导致了时间复杂度较高,模型收敛较慢,而且loss和梯度会有大幅度的震荡。
- MBGD (Mini-batch gradient descent)
MBGD相当于缝合了SGD和BGD,即将多个数据样本输入网络计算梯度后就进行一次更新:
其中 为模型参数,
为batch size个样本输入后的模型参数更新梯度,
为学习率。
MBGD同时解决了两者的缺点,使得参数更新更稳定更快速,这也是我们最常用的方法,pytorch代码里SGD类也是指的MBGD(当然可以自己设置特殊的batch size,就会退化为SGD或BGD)。
3.SGD优化
实际在pytorch的代码中,还加了两个优化,分别是:
- Momentum
从原理上可以很好理解,Momentum就是在当前step的参数更新中加入了部分上一个step的梯度,公式表示为:
其中 和
为当前step和上一个step的动量,即当前step的动量会有当前step的梯度和上一个step的动量叠加计算而来,其中
一般设置为0.9或者0.99。
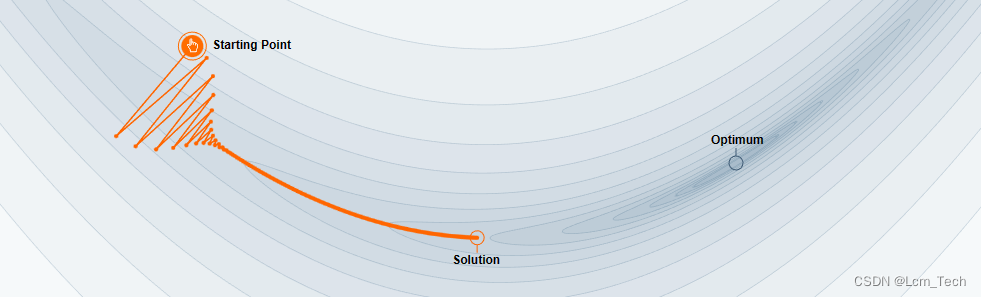
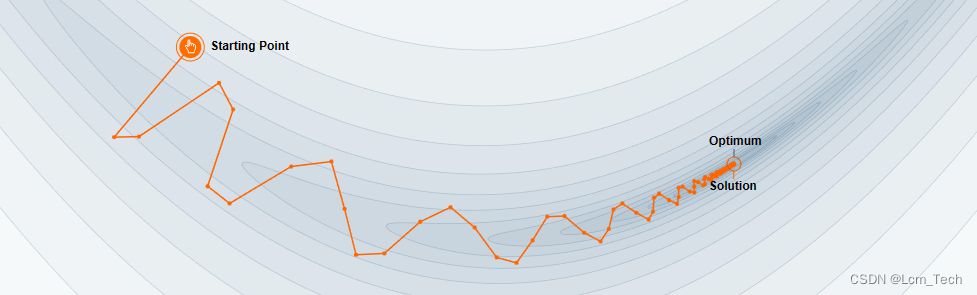
我们可以从以下两幅示意图中看到区别,第一张图没有加Momentum,第二张图加了Momentum。可以看到在第一张图中,点一开始往梯度变化的方向移动,但是到后来梯度逐渐变小,到最后变为了0,所以最终没有到达最优点。而第二张图由于加了Momentum,所以点会有一个横向移动的惯性,即使到了梯度为0的地方也能依靠惯性跳出。
- Nesterov accelerated gradient(NAG)
加了Momentum之后,实际上模型参数更新的方向就不是当前点的梯度方向,所以这会一定程度上导致模型更新的不准确。NAG方法就是让参数先根据惯性预测出下一步点应该在的位置,然后根据预测点的梯度再更新一次:
4.pytorch代码
以下代码为pytorch官方SGD代码,其中关键部分在step()中。
import torch
from torch.optim import Optimizer
from torch.optim.optimizer import required
class SGD(Optimizer):
r"""Implements stochastic gradient descent (optionally with momentum).
Nesterov momentum is based on the formula from
`On the importance of initialization and momentum in deep learning`__.
Args:
params (iterable): iterable of parameters to optimize or dicts defining
parameter groups
lr (float): learning rate
momentum (float, optional): momentum factor (default: 0)
weight_decay (float, optional): weight decay (L2 penalty) (default: 0)
dampening (float, optional): dampening for momentum (default: 0)
nesterov (bool, optional): enables Nesterov momentum (default: False)
Example:
>>> optimizer = torch.optim.SGD(model.parameters(), lr=0.1, momentum=0.9)
>>> optimizer.zero_grad()
>>> loss_fn(model(input), target).backward()
>>> optimizer.step()
__ http://www.cs.toronto.edu/%7Ehinton/absps/momentum.pdf
.. note::
The implementation of SGD with Momentum/Nesterov subtly differs from
Sutskever et. al. and implementations in some other frameworks.
Considering the specific case of Momentum, the update can be written as
.. math::
v = \rho * v + g \\
p = p - lr * v
where p, g, v and :math:`\rho` denote the parameters, gradient,
velocity, and momentum respectively.
This is in contrast to Sutskever et. al. and
other frameworks which employ an update of the form
.. math::
v = \rho * v + lr * g \\
p = p - v
The Nesterov version is analogously modified.
"""
def __init__(self, params, lr=required, momentum=0, dampening=0,
weight_decay=0, nesterov=False):
if lr is not required and lr < 0.0:
raise ValueError("Invalid learning rate: {}".format(lr))
if momentum < 0.0:
raise ValueError("Invalid momentum value: {}".format(momentum))
if weight_decay < 0.0:
raise ValueError("Invalid weight_decay value: {}".format(weight_decay))
defaults = dict(lr=lr, momentum=momentum, dampening=dampening,
weight_decay=weight_decay, nesterov=nesterov)
if nesterov and (momentum <= 0 or dampening != 0):
raise ValueError("Nesterov momentum requires a momentum and zero dampening")
super(SGD, self).__init__(params, defaults)
def __setstate__(self, state):
super(SGD, self).__setstate__(state)
for group in self.param_groups:
group.setdefault('nesterov', False)
def step(self, closure=None):
"""Performs a single optimization step.
Arguments:
closure (callable, optional): A closure that reevaluates the model
and returns the loss.
"""
loss = None
if closure is not None:
loss = closure()
for group in self.param_groups:
weight_decay = group['weight_decay']
momentum = group['momentum']
dampening = group['dampening']
nesterov = group['nesterov']
for p in group['params']:
if p.grad is None:
continue
d_p = p.grad.data
if weight_decay != 0:
d_p.add_(weight_decay, p.data)
if momentum != 0:
param_state = self.state[p]
if 'momentum_buffer' not in param_state:
buf = param_state['momentum_buffer'] = torch.clone(d_p).detach()
else:
buf = param_state['momentum_buffer']
buf.mul_(momentum).add_(1 - dampening, d_p)
if nesterov:
d_p = d_p.add(momentum, buf)
else:
d_p = buf
p.data.add_(-group['lr'], d_p)
return loss
业务合作/学习交流+v:lizhiTechnology
如果想要了解更多优化器相关知识,可以参考我的专栏和其他相关文章:
【优化器】(一) SGD原理 & pytorch代码解析_sgd优化器-CSDN博客
【优化器】(二) AdaGrad原理 & pytorch代码解析_adagrad优化器-CSDN博客
【优化器】(三) RMSProp原理 & pytorch代码解析_rmsprop优化器-CSDN博客
【优化器】(四) AdaDelta原理 & pytorch代码解析_adadelta里rho越大越敏感-CSDN博客
【优化器】(五) Adam原理 & pytorch代码解析_adam优化器-CSDN博客
【优化器】(六) AdamW原理 & pytorch代码解析-CSDN博客
【优化器】(七) 优化器统一框架 & 总结分析_mosec优化器优点-CSDN博客
如果想要了解更多深度学习相关知识,可以参考我的其他文章:















 2625
2625











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









