






 PIR模块主要利用热释电效应探测人体,广泛应用于门铃项目。菲涅尔透镜通过独特的齿纹设计实现不同探测角度和距离。透镜的位置和分区设计影响着感应区形状和灵敏度,例如单区多段水平/垂直式、多区多段感应式和圆锥式等,适应不同场景需求。
PIR模块主要利用热释电效应探测人体,广泛应用于门铃项目。菲涅尔透镜通过独特的齿纹设计实现不同探测角度和距离。透镜的位置和分区设计影响着感应区形状和灵敏度,例如单区多段水平/垂直式、多区多段感应式和圆锥式等,适应不同场景需求。
PIR模块分为PIR SENSOR和透镜部分
PIR模块主要用于探测人体,在门铃项目中广泛应用,就技术而言PIR指的是passive infrared,它的核心原理是热释电效应,需要借助菲涅尔透镜实现更远的探测距离,下文对sensor和透镜进行一一介绍。
- 透镜
- 原理
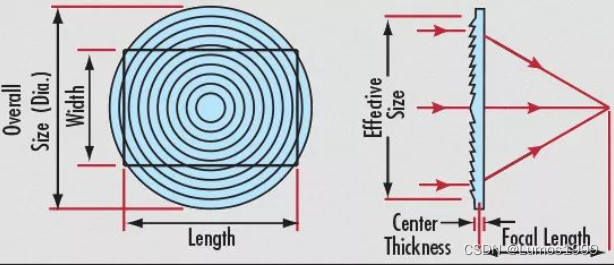
菲涅尔透镜是通过透镜对光进行汇聚的原理,将透镜塌陷在一个平面内,可以节省大量的成本。 菲涅尔透镜的一侧有等距的齿纹,使用了电镀工艺+聚乙烯,镜片厚度在0.5-0.8mm,在镜片上刻录了同心圆,故镜片的剖面看起来为锯齿状,此外同心圆的疏密也对探测范围有影响:同心圆越密探测角度越大,焦距越远,同心圆刻的纹越深,探测距离越远,焦距越近。
2.透镜与PIR的相对位置
由于对探测范围有不同的需求,透镜和sensor的摆放位置也可以相应变化
A.单区多段水平式和单区多段垂直式
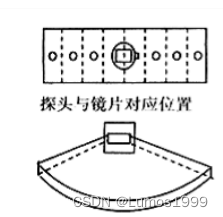
如图为水平式,由于水平视场角大因此在水平方向感应角度大,能够形成一个长方形扇面感应区,这种感应方式能够避开上下红外线的干扰
如图为单区多段垂直式,该位置摆放视场角较小,又称为垂直幕帘式感应,能够避开左右两边的红外线干扰
B.多区多段感应式和多区多段圆锥式
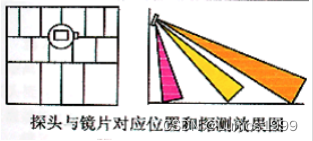
多区多段感应式常用于壁挂式,倾斜向下,能够探测三个不同的区域

多区多段圆锥式则应用于顶挂式,直接向下探测,对透镜而言水平视场角和垂直视场角相同,但双源探头的水平视场角大于垂直视场角,所以探测范围不是圆锥,而是向中间塌陷,但如果是四源的探头,感应的方向图就更接近于圆锥,如上图所示。
C.透镜和SENSOR位置有所偏移
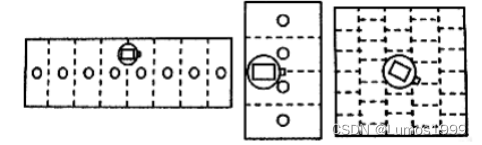
当sensor偏上,探测方向就会向下,同理sensor偏左,探测方向就会偏右,而如图右,探头偏移45度会降低人体活动受方向的限制,更适合应用于探测狭长区域
3. 透镜的分区
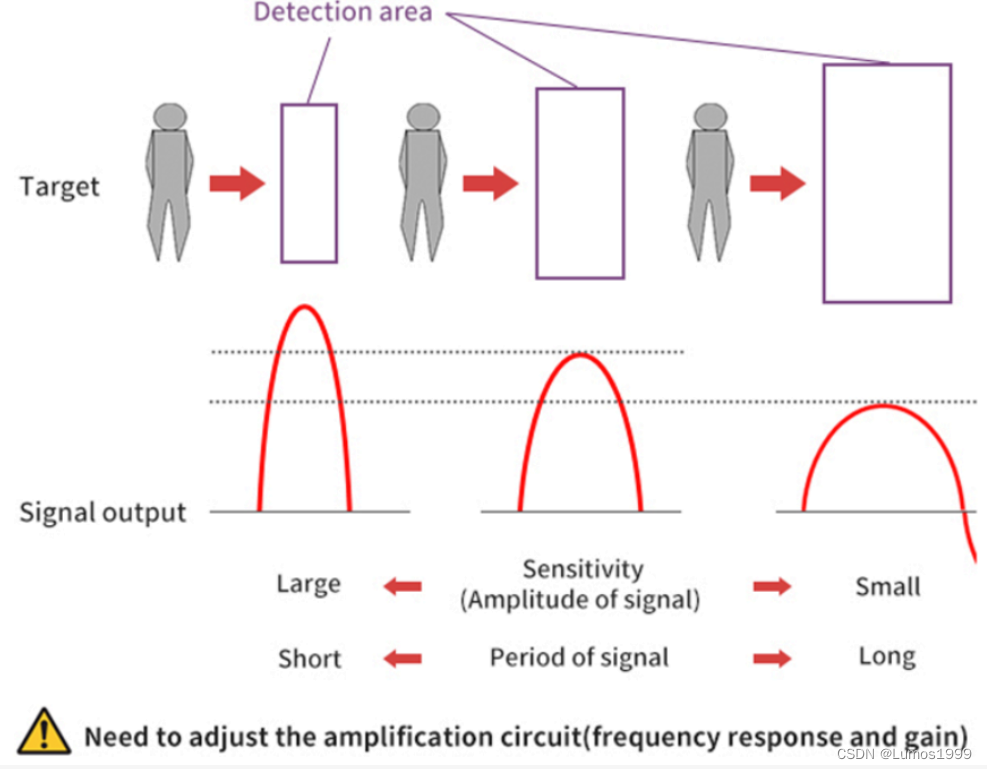
由于透镜中会做出很多个分区,分成明区暗区和盲区,人在不同分区占据面积的比例大小会直接影响的信号的强弱,也就会影响PIR的灵敏度

















 1567
1567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









