 STM32F103标准库开发:SysTick精准延时实现
STM32F103标准库开发:SysTick精准延时实现





STM32F103标准库开发----目录
精准延时delay文件链接----点击下载
SysTick相关寄存器的介绍:Cortex-M3权威指南(中文详细版+英文原著版)
Cortex-M3权威指南(中文版)第134页有SysTick相关寄存器的详细介绍。
一、SysTick使用详解
1. SysTick简介
SysTick是一个24bit的倒计数定时器,具有自动重载和溢出中断功能,所有基于Cortex_M3处理器的微控制器都有一个SysTick定时器,从而获得一定的时间间隔。
2. SysTick相关寄存器
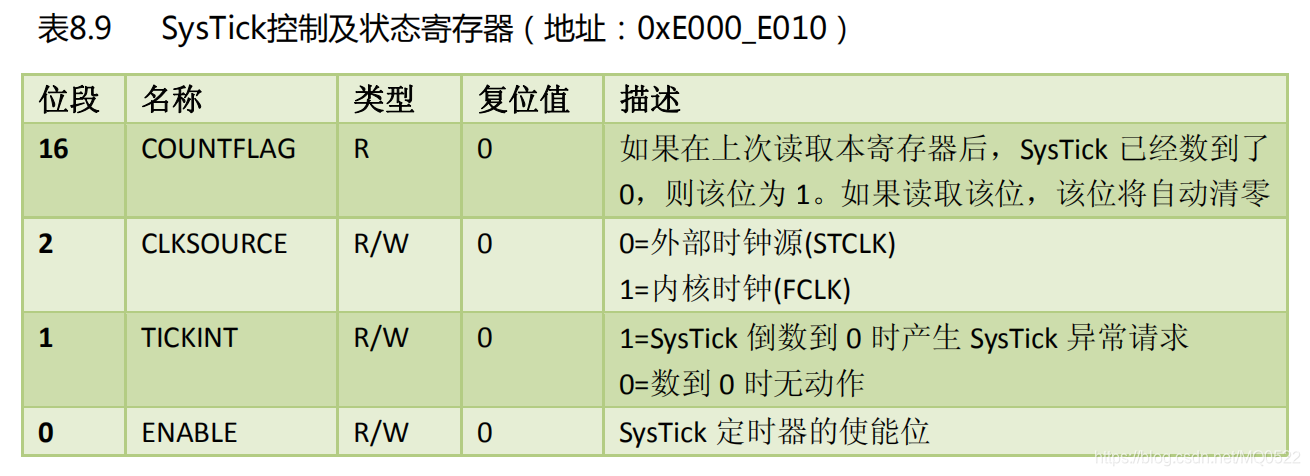
状态寄存器-CTRL
STCLK外部时钟源:AHB总线时钟的 1/8
FCLK 内部时钟:AHB总线时钟——STM32F103是72MHz
重装载数值寄存器-LOAD

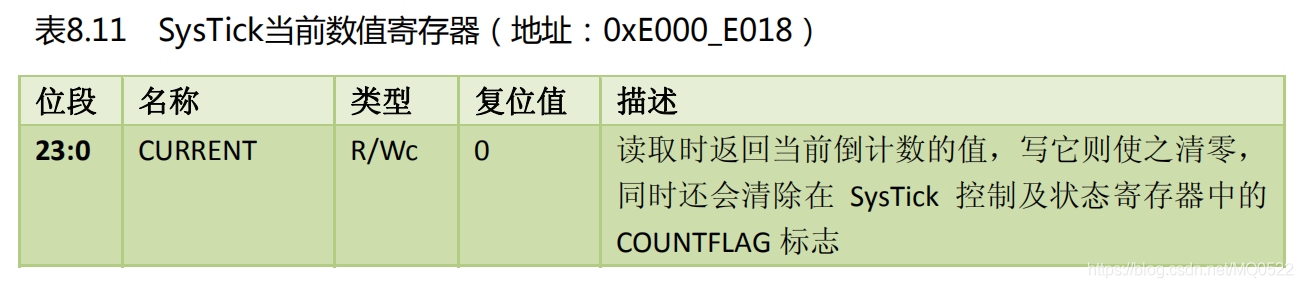
当前值寄存器-VAL
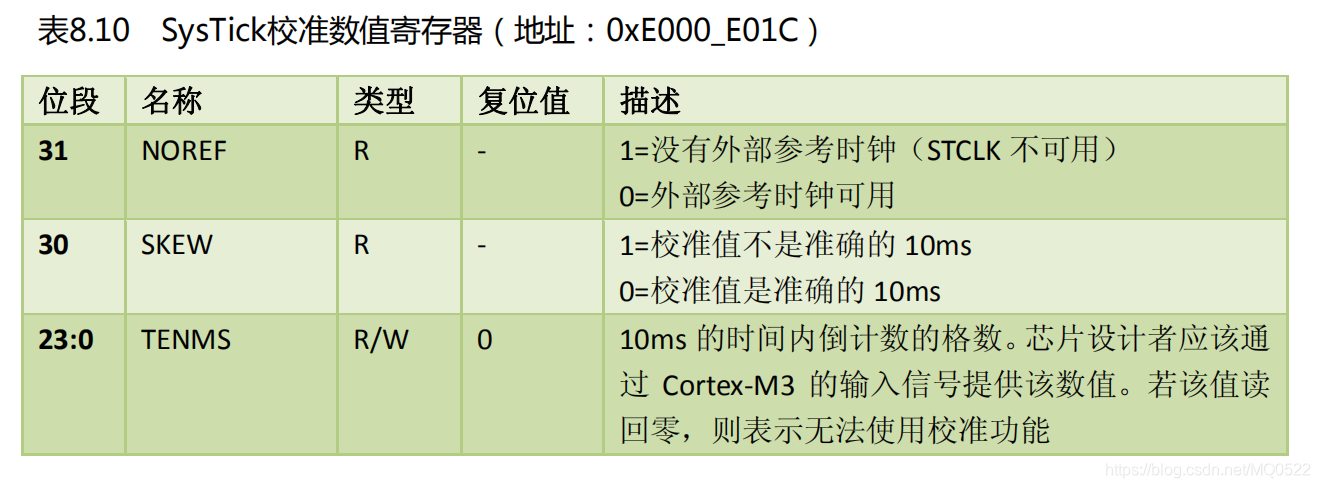
校准寄存器-CALIB
二、编写精准延时——delay
1. 非中断式精准延时
void delay_us(uint16_t us)//uS微秒级延时程序(参考值即是延时数,72MHz时最大值233015)
{
uint32_t temp;
SysTick->LOAD=(SystemCoreClock/1000000)*us; //重装计数初值(当主频是72MHz,72次为1微秒)
SysTick->VAL=0x00; //清空定时器的计数器
SysTick->CTRL=0x00000005; //时钟源HCLK,打开定时器
do
{
temp=SysTick->CTRL;
}
while(temp&0x01&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00000004; //关闭定时器
SysTick->VAL=0x00; //清空定时器的计数器
}
void delay_ms(uint16_t ms)//mS毫秒级延时程序(参考值即是延时数,最大值65535)
{
while( ms-- != 0)
{
delay_us(1000); //调用1000微秒的延时
}
}
void delay_s(uint16_t s)//S秒级延时程序(参考值即是延时数,最大值65535)
{
while( s-- != 0)
{
delay_ms(1000); //调用1000毫秒的延时
}
}
2. 中断式精准延时
volatile uint32_t uwTick;
void SysTick_Handler(void)//滴答定时器中断服务函数
{
if(uwTick != 0x00)
{
uwTick--;
}
}
void Delay_us(uint16_t us)
{
SysTick_Config(SystemCoreClock/1000000);//开滴答定时器中断us级
uwTick = us;
while(uwTick != 0);//等待时间到达
SysTick->CTRL = 0x00;//关闭定时器
SysTick->VAL = 0x00;//清空定时器的计数器
}
void Delay_ms(uint16_t ms)
{
while( ms-- != 0)
{
delay_us(1000); //调用1000微秒的延时
}
}
void Delay_s(uint16_t s)
{
while( s-- != 0)
{
delay_ms(1000); //调用1000毫秒的延时
}
}



















 882
882

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











