






扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,需要可以联系下列为运行图过程截图
ID:2154713534978226
保利龙小叮当
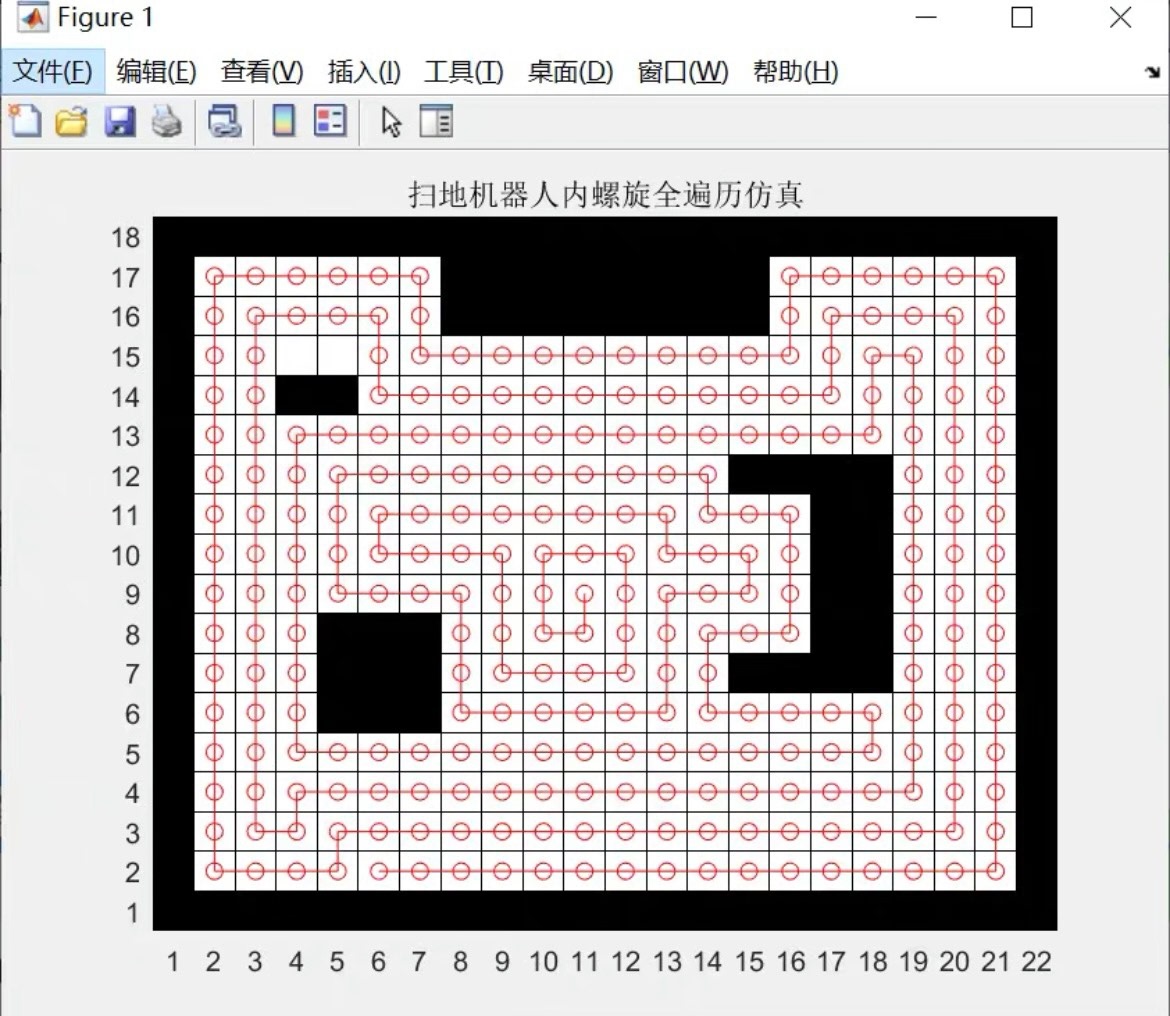
扫地机器人路径规划问题一直是机器人领域内的热门研究方向之一。在实际应用中,如何高效地规划扫地机器人的路径,以实现全覆盖清扫,并且避免不必要的重复清扫,是一个具有挑战性的问题。本文将介绍一种基于全覆盖内螺旋算法的扫地机器人路径规划方法,并使用MATLAB实现该算法。
路径规划是指在给定的环境中,确定机器人从起始位置到目标位置的最佳路径。对于扫地机器人来说,全覆盖清扫是最基本的要求,即机器人能够经过每一个待清扫的点。而内螺旋算法是一种经典的路径规划算法,其核心思想是机器人首先进行内螺旋清扫,然后再进行外螺旋清扫,以实现全覆盖清扫。
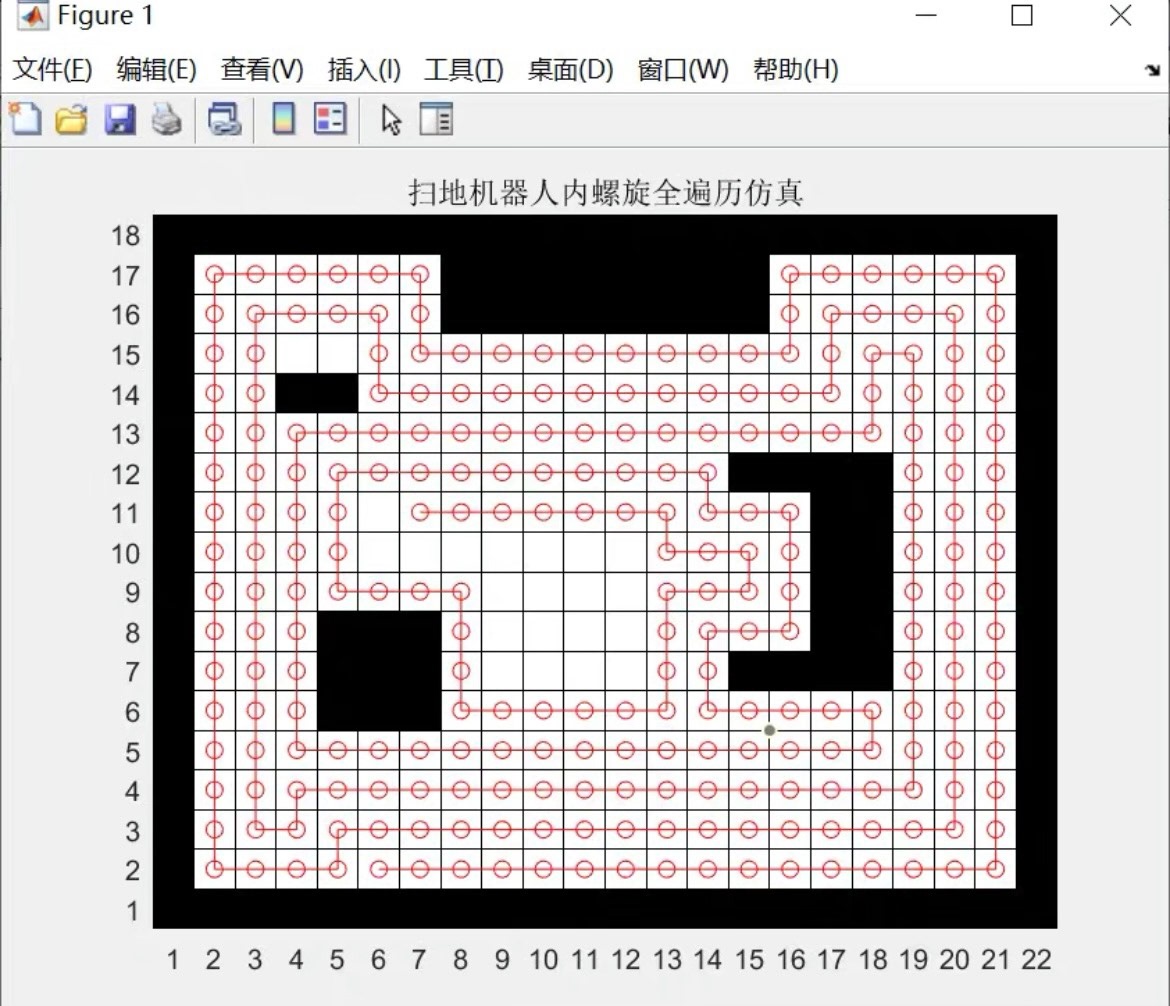
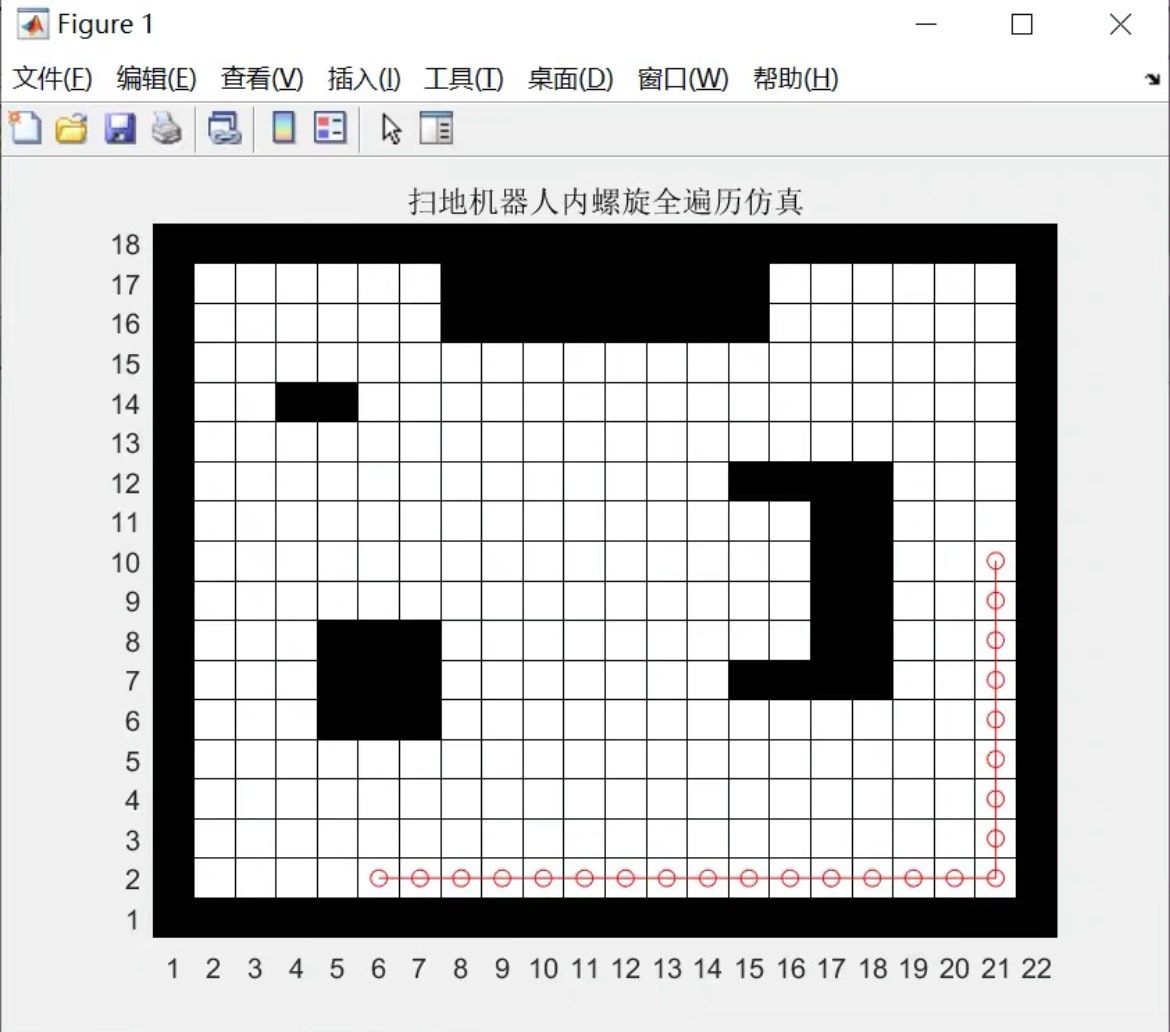
内螺旋算法的具体步骤如下:首先,机器人从起始位置开始,按照一定的规则向前移动,直到遇到障碍物或者边界。然后,机器人沿逆时针方向旋转一定角度,再向前移动,直到再次遇到障碍物或者边界。重复以上步骤,直到机器人返回起始位置。
为了实现内螺旋算法的路径规划,我们使用MATLAB进行算法实现。MATLAB是一种功能强大的数值计算软件,它提供了丰富的工具箱和函数库,能够方便地进行算法设计和实现。
在实际应用中,我们需要考虑多种因素来优化路径规划的效果。例如,机器人的行动范围、障碍物的位置和形状、清扫时间等因素都会对路径规划产生影响。因此,在实现路径规划算法时,我们需要对这些因素进行合理的建模和考虑,以提高路径规划的性能。
为了验证路径规划算法的有效性,我们通过实验进行了测试。实验使用了一款扫地机器人,并在不同环境下进行了路径规划测试。通过记录机器人的运行轨迹和清扫效果,我们可以评估路径规划算法的性能,并对算法进行优化和改进。
通过以上介绍,我们可以看出,扫地机器人路径规划问题是一个复杂而具有挑战性的技术问题。全覆盖的内螺旋算法是一种经典的路径规划方法,能够有效地实现扫地机器人的全覆盖清扫。通过使用MATLAB进行算法实现,并进行实验验证,我们可以进一步优化和改进路径规划算法,提高扫地机器人的性能和效率。
总结起来,本文基于全覆盖内螺旋算法,使用MATLAB实现了扫地机器人的路径规划。通过合理建模和考虑多种因素,我们优化了算法的性能,并通过实验验证了算法的有效性。这些研究成果对于提高扫地机器人的清扫效率和性能具有重要的实际应用意义。
【相关代码,程序地址】:http://fansik.cn/713534978226.html


















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









