







项目要点
- 4种天气数据的分类: cloudy, rain, shine, sunrise.
- all_img_path = glob.glob(r'G:\01-project\08-深度学习\day 56 迁移学习\dataset/*.jpg') # 指定文件夹 # import glob
- 获取随机数列: index = np.random.permutation(len(all_img_path))
- 建立数组和索引的关联: idx_to_species = dict((i, c) for i, c in enumerate(species))
- transform = transforms.Compose([transforms.Resize((96, 96)), transforms.ToTensor()]) # 转换为tensor # 定义transform
- 数据由numpy转换为tensor: torch.from_numpy(np.array(label)).long()
- 判断图片的通道数: if np.array(img).shape[-1] == 3
- 打开文件夹图片: img = Image.open(all_img_path[0])
- 数据转换为ndarray: np.asarray(img).shape
- train_d1 = torch.utils.data.DataLoader(train_ds, batch_size = 16, shuffle = True, collate_fn = MyDataset.collate_fn, drop_last = True) # 定义dataloader # 最后一批数据直接不用
定义模型:
- 添加卷积层: self.conv1 = nn.Conv2d(3, 32, 3)
- 添加激活层: x = self.pool(F.relu(self.conv1(x)))
- 添加BN层: self.bn1 = nn.BatchNorm2d(32) # x = self.bn1(x)
- 添加Flatten层: x = nn.Flatten()(x) # 用来将输入“压平”,即把多维的输入一维化,# 常用在从 卷积层到全连接层的过渡。
- 添加卷积层: self.fc1 = nn.Linear(64 * 10 * 10, 1024)
- 添加激活层: x = F.relu(self.fc1(x))
- 添加dropout: self.dropout = nn.Dropout() # 防止过拟合
- 添加输出层: self.fc3 = nn.Linear(256, 4)
- x = self.fc3(x)
- 定义程序运行位置: device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
- 定义优化器: optimizer = optim.Adam(model.parameters(), lr=0.001)
- 定义loss: loss_fn = nn.CrossEntropyLoss()
- 定义梯度下降:
for x, y in train_loader:
x, y = x.to(device), y.to(device)
y_pred = model(x)
loss = loss_fn(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
with torch.no_grad():
y_pred = torch.argmax(y_pred, dim=1)
correct += (y_pred == y).sum().item()
total += y.size(0)
running_loss += loss.item()一 自定义数据集分类
4种天气数据的分类: cloudy, rain, shine, sunrise.
1.1 导包
import torch
import numpy as np
from torchvision import transforms
import glob
from PIL import Image
import torch.nn.functional as F
import torch.optim as optim
import matplotlib.pyplot as plt1.2 数据导入
- 指定文件夹
all_img_path = glob.glob(r'G:\01-project\08-深度学习\day 56 迁移学习\dataset/*.jpg')- 打乱顺序
# permutation 排列组合
# 借助ndarray的索引取值的方法, 打乱数据
index = np.random.permutation(len(all_img_path))
index # array([ 175, 1027, 530, ..., 4, 831, 65])species = ['cloudy', 'rain', 'shine', 'sunrise']
# 建立类别和索引之间的映射关系
idx_to_species = dict((i, c) for i, c in enumerate(species))
# {0: 'cloudy', 1: 'rain', 2: 'shine', 3: 'sunrise'}
# 生成所有图片的label
all_labels = []
for img in all_img_path:
for i,c in enumerate(species):
if c in img:
all_labels.append(i)- 数据格式转换
all_labels = np.array(all_labels, dtype=np.int64)[index]
all_labels # array([0, 3, 2, ..., 0, 3, 0], dtype=int64)all_img_path = np.array(all_img_path)[index]
all_img_path
1.3 数据拆分
# 手动划分一下训练数据和测试数据
split = int(len(all_img_path) * 0.8) # int 只取整数部分
train_imgs = all_img_path[:split]
train_labels = all_labels[:split]
test_imgs = all_img_path[split:]
test_labels = all_labels[split:]- 定义 transform
# 定义transform
transform = transforms.Compose([transforms.Resize((96, 96)),
transforms.ToTensor()]) # 转换为tensor1.4 数据处理
class MyDataset(torch.utils.data.Dataset):
def __init__(self, img_paths, labels, transform): # 接受初始化数据
self.imgs = img_paths
self.labels = labels
self.transforms = transform
def __getitem__(self, index): # 取上面的数据
# 根据index获取item
img_path = self.imgs[index]
label = self.labels[index]
# 通过PIL的Image读取图片
img = Image.open(img_path)
if np.array(img).shape[-1] == 3:
data = self.transforms(img)
return data, torch.from_numpy(np.array(label)).long()
else:
# 否则为有问题的图片
print(img_path)
# print(np.array(img).shape)
# print(np.array(img))
return self.__getitem__(index+1)
def __len__(self): # 调用数据时, 返回长度
return len(self.imgs) # 返回个数
# 重写collate_fn
@staticmethod
def collate_fn(batch):
# batch是列表, 长度是batch_size
# 列表的每个元素是一个元组(x, y)
# [(x1, y1), (x2, y2).......]
# collate_fn 的作用, 把所有的x,y分别放到一起, x在一起, y在一起.
# 把batch中返回值为空的部分过滤掉
batch = [sample for sample in batch if sample is not None]
# 简单方法, 直接调用默认的collate方法
# from torch.utils.data.dataloader import default_collate
# return default_collate(batch)
# 方式二
imgs, labels = zip(*batch)
return torch.stack(imgs, 0), torch.stack(labels, 0)
dataset = MyDataset(all_img_path, all_labels, transform)
len(dataset) # 1122train_ds = MyDataset(train_imgs, train_labels, transform)
test_ds = MyDataset(test_imgs, test_labels, transform)
# dataloader
train_d1 = torch.utils.data.DataLoader(train_ds, batch_size = 16,
shuffle = True,
collate_fn=MyDataset.collate_fn,
drop_last = True) # 最后一批数据直接不用
test_d1 = torch.utils.data.DataLoader(test_ds, batch_size = 16 * 2,
collate_fn=MyDataset.collate_fn, drop_last = True)
for x, y in train_d1:
print(x.shape,y.shape)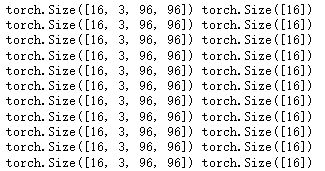
imgs, labels = next(iter(train_d1))
imgs.shape # torch.Size([16, 3, 96, 96])
labels # tensor([3, 3, 2, 3, 2, 3, 3, 0, 1, 1, 0, 3, 2, 0, 1, 1])1.5 定义模型
# 定义模型 # 添加BN层
import torch.nn as nn
class Net(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(3, 32, 3) # 卷积 # (96, 96, 3) --> (32, 94, 94)
# 主要做标准化处理
self.bn1 = nn.BatchNorm2d(32)
self.pool = nn.MaxPool2d(2, 2) # 池化 # (32, 47, 47)
self.conv2 = nn.Conv2d(32, 32, 3) # (32, 45, 45) --> pooling --> (32, 22, 22)
self.bn2 = nn.BatchNorm2d(32)
self.conv3 = nn.Conv2d(32, 64, 3) # (64, 22, 22) --> pooling --> (64, 10, 10)
self.bn3 = nn.BatchNorm2d(64)
self.dropout = nn.Dropout() # 防止过拟合 #
# batch, channel, height, width, 64
# 全连接层
self.fc1 = nn.Linear(64 * 10 * 10, 1024)
self.bn_fc1 = nn.BatchNorm1d(1024)
self.fc2 = nn.Linear(1024, 256)
self.bn_fc2 = nn.BatchNorm1d(256)
self.fc3 = nn.Linear(256, 4)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.bn1(x)
x = self.pool(F.relu(self.conv2(x)))
x = self.bn2(x)
x = self.pool(F.relu(self.conv3(x)))
x = self.bn3(x)
# x.view(-1, 64 * 10 * 10)
# flatten , Flatten层用来将输入“压平”,即把多维的输入一维化,
# 常用在从卷积层到全连接层的过渡。
x = nn.Flatten()(x)
x = F.relu(self.fc1(x))
x = self.bn_fc1(x)
x = self.dropout(x)
x = F.relu(self.fc2(x))
x = self.bn_fc2(x)
x = self.dropout(x)
x = self.fc3(x)
return xdevice = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
device # device(type='cpu')
# 生成模型
model = Net()
# 把模型拷贝到GPU
if torch.cuda.is_available():
model.to(device)1.6 定义训练
optimizer = optim.Adam(model.parameters(), lr=0.001)
loss_fn = nn.CrossEntropyLoss()
# 定义训练过程
def fit(epoch, model, train_loader, test_loader):
correct = 0
total = 0
running_loss = 0
for x, y in train_loader:
x, y = x.to(device), y.to(device)
y_pred = model(x)
loss = loss_fn(y_pred, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
with torch.no_grad():
y_pred = torch.argmax(y_pred, dim=1)
correct += (y_pred == y).sum().item()
total += y.size(0)
running_loss += loss.item()
epoch_loss = running_loss / len(train_loader.dataset)
epoch_acc = correct / total
# 测试过程
test_correct = 0
test_total = 0
test_running_loss = 0
with torch.no_grad():
for x, y in test_loader:
x, y = x.to(device), y.to(device)
y_pred = model(x)
loss = loss_fn(y_pred, y)
y_pred = torch.argmax(y_pred, dim=1)
test_correct += (y_pred == y).sum().item()
test_total += y.size(0)
test_running_loss += loss.item()
test_epoch_loss = test_running_loss / len(test_loader.dataset)
test_epoch_acc = test_correct /test_total
print('epoch', epoch,
'loss', round(epoch_loss, 3),
'accuracy', round(epoch_acc, 3),
'test_loss', round(test_epoch_loss, 3),
'test_accuracy', round(test_epoch_acc, 3))
return epoch_loss, epoch_acc, test_epoch_loss, test_epoch_acc- 指定训练
# 指定训练次数
epochs = 10
train_loss = []
train_acc = []
test_loss = []
test_acc = []
for epoch in range(epochs):
epoch_loss, epoch_acc, test_epoch_loss, test_epoch_acc = fit(epoch, model,
train_d1, test_d1)
train_loss.append(epoch_loss)
train_acc.append(epoch_acc)
test_loss.append(epoch_loss)
test_acc.append(epoch_acc)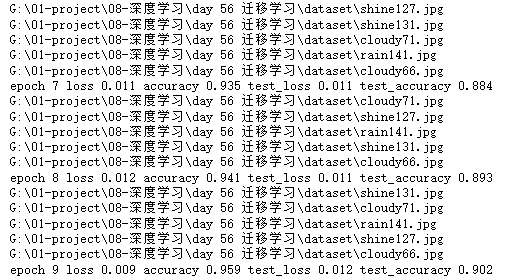















 968
968











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









