







线控的文章之前陆陆续续发了一两篇,一直没整理完,最近抽空整理完了,之前的文章有些凌乱,统一整理到这一篇下面。
关于仿真模型
需要源文件仿真模型的同学们,还是在某宝店铺<极简车辆控制>中寻找。
文件包含:
模型中每个模块都包含必要的注释。
一、线控转向介绍
线控转向的详细介绍可以参考以下链接:
高阶自动驾驶核心部件:英创汇智线控转向解决方案 _北京英创汇智汽车技术有限公司 (trinova-tech.com)
博主这里只从中摘取部分内容进行线控转向介绍。
1 线控转向发展历程

汽车转向系统经历了从:机械转向- -液压助力转向- -电控液压助力转向- -电动助力转向- -线控转向几个阶段。目前成熟量产的主流助力产品是电动助力转向。线控转向现在是各个主机厂、零部件公司重点预研开发的新方向,与传统助力转向相比具有方便布置,响应更快等优点。
2 线控转向系统机械方案
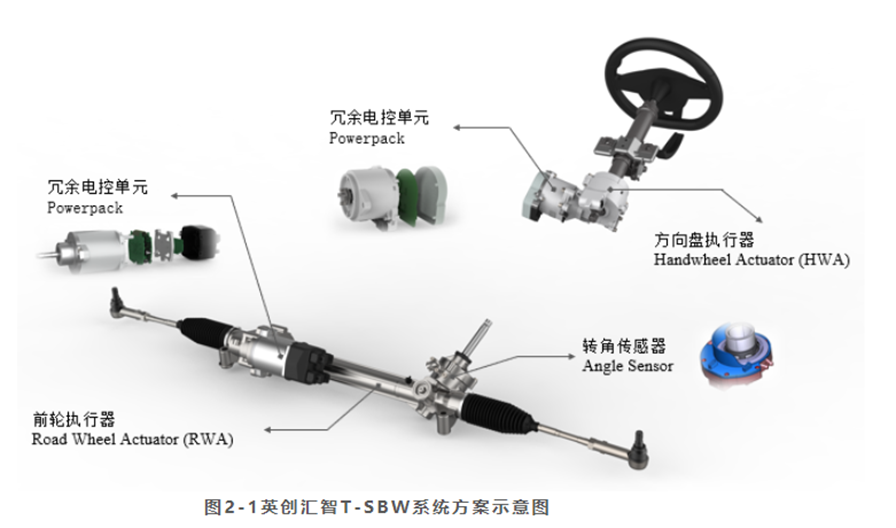
从上图可以看到,线控转向系统中HWA与RWA之间没有机械链接,而是由信号线链接,这就是线控转向名称由来。HWA提供转角信号,RWA跟随该转角信号,实现上下联动。
●方向盘执行器(Handwheel Actuator,HWA):主要由方向盘、转向管柱、减速器、TAS传感器、冗余电控单元组成,主要功能是获取驾驶员的意图,并将驾驶员期望的方向盘转角信号给到前轮执行器(RWA),同时根据前轮执行器反馈的齿条力模拟车辆行驶的路面反馈力,为驾驶员提供路感反馈信息。
●前轮执行器(Road Wheel Actuator,RWA):前轮执行器有机械转向器、转角传感器、冗余电控单元等组成,主要功能是接收方向盘执行器(HWA)发送的期望转角指令,并通过控制电机实现齿条的横向移动,最终实现转向功能。
●冗余电控单元(Fail-Operational Powerpack):方向盘执行器(HWA)和前轮执行器(RWA)均需要电控单元作为执行器,分别实现路感反馈控制和前轮转向的功能。而采用冗余的电控单元主要是为了支持高阶自动驾驶工况,即在自动驾驶场景下,如果线控转向(SBW)系统的方向盘执行器(HWA)或前轮执行器(RWA)出现了任何一种单点失效,该部件要具备失效可运行的功能(Fail-Operational)来保证路感不丢失或者前轮不失去转向能力。英创汇智线控转向(SBW)系统的方向盘执行器(HWA)和前轮执行器(RWA)电控单元均采用了全冗余电控方案驱动六相永磁同步电机的方案,单点失效后系统仍然具备路感反馈以及执行转向控制的能力。
●转角传感器(Angle Sensor):前轮执行器(RWA)需要精准地跟踪期望转角,因此需要转角传感器测量实际的小齿轮输入转角。
3 线控转向系统电气架构
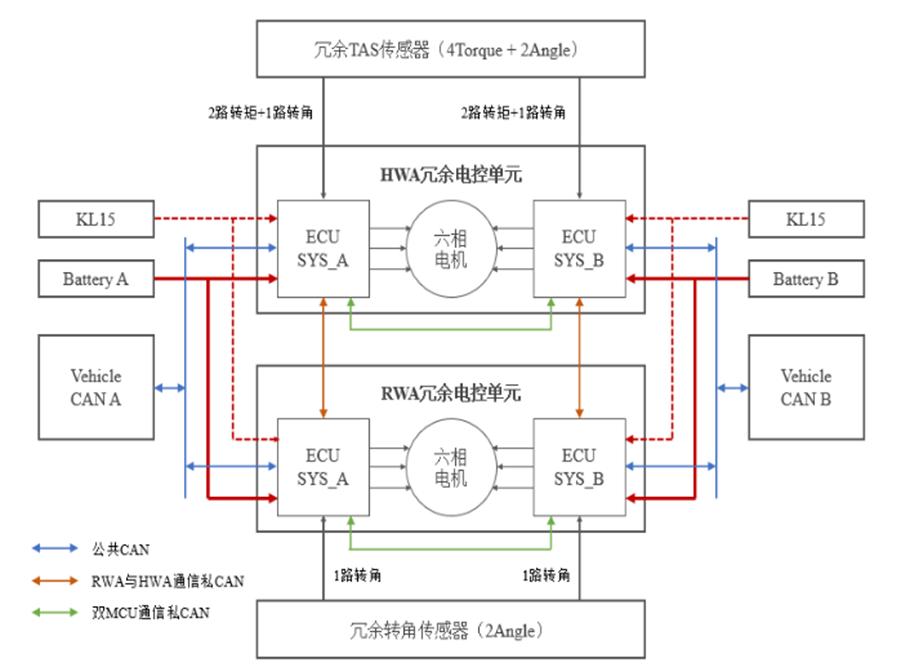
车辆具备冗余的电源、公共CAN通信网络,方向盘执行器(HWA)和前轮执行器(RWA)均采用全冗余的电控单元,分别接入不同的电源和CAN通信网络,实现独立的两个系统外部的电气隔离。全冗余电控单元两个ECU之间也通过CAN通信来实现信号交互,从而可以进行信号交互、协同控制。方向盘执行器(HWA)和前轮执行器(RWA)之间通过私CAN进行通信,传递期望转角信号、齿条力信号等。方向盘执行器(HWA)的每个ECU需要采集双路转矩信号与单路的绝对转角信号(支持功能安全ASIL D等级),因此对应“4+2”的TAS传感器;前轮执行器(RWA)每个ECU需要采集单路的绝对转角信号(支持功能安全ASIL D等级),因此对应2路转角信号的角度传感器。线控转向的冗余策略非常复杂,且不是本篇文章讨论的重点,因此不展开赘述。
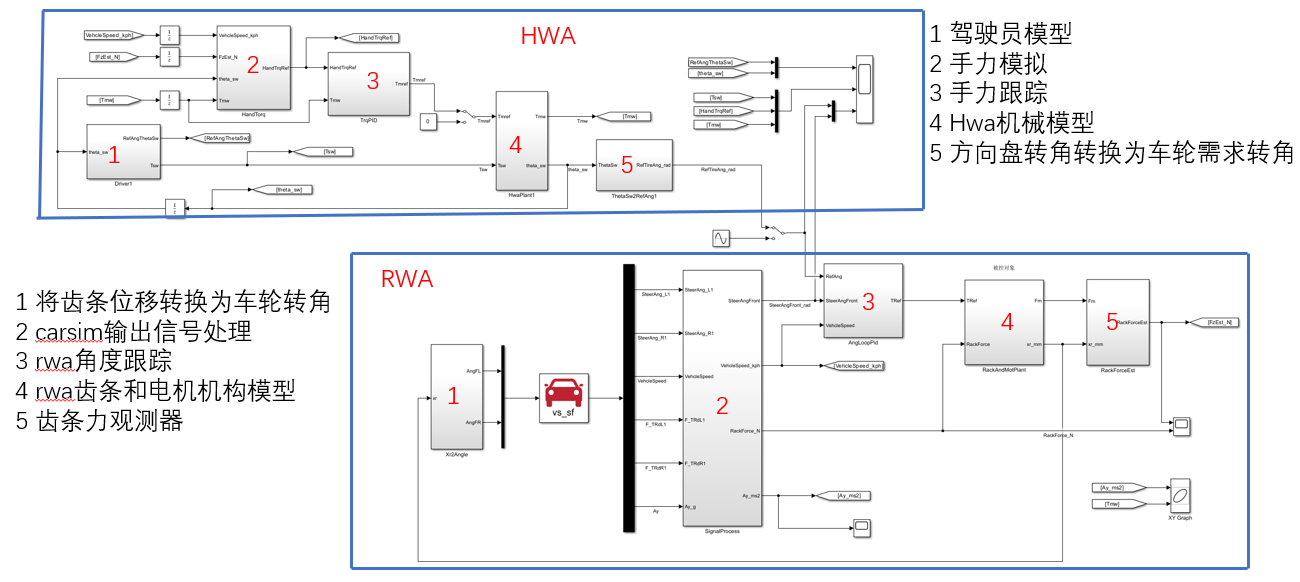
4 线控转向算法架构
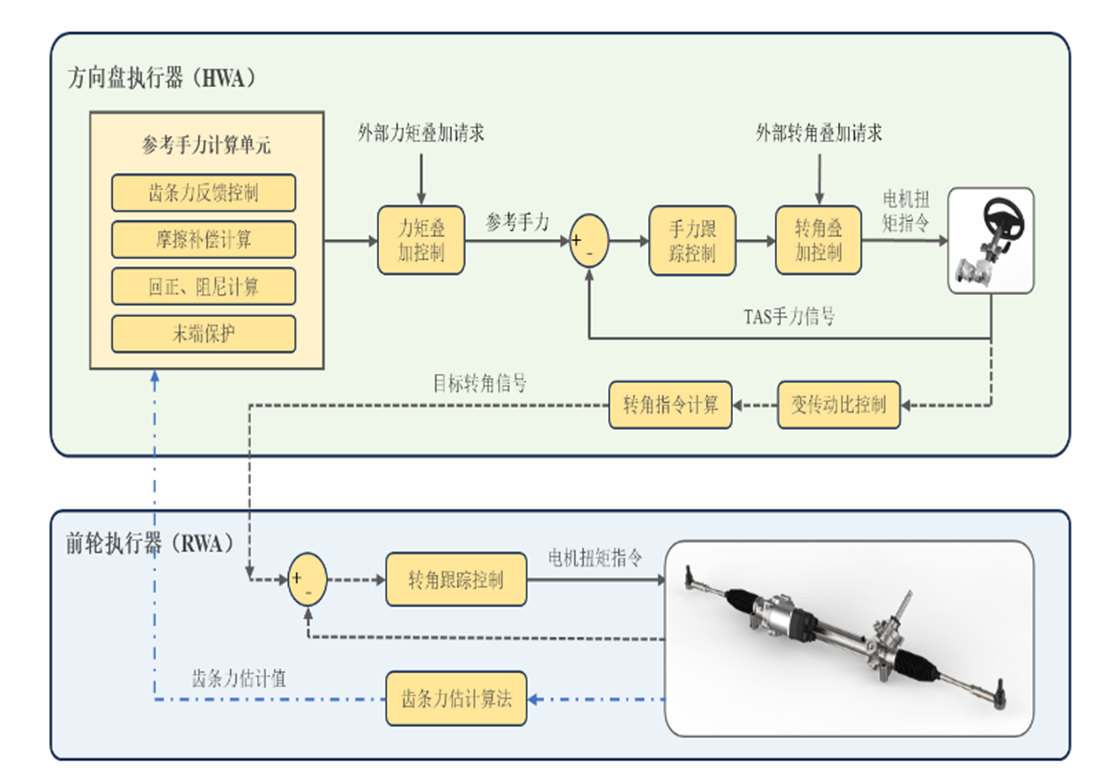
从上图可以看出,HWA具有以下功能:
- 参考手力计算
齿条力反馈控制--即基于齿条力的手感
摩擦补偿
回正
阻尼计算
末端保护 - 力矩叠加控制--叠加外部如ADAS控制器的力矩请求
- 手力跟踪
- 转角叠加控制--叠加外部如ADAS控制器的角度请求
- 变传动比控制
- 转角指令计算。
RWA具有以下功能:
- 转角跟踪
- 齿条力估算
以上这些功能中,标红加粗的功能为本次线控转向仿真基础版中所包含的。
二、RWA目标角度跟踪
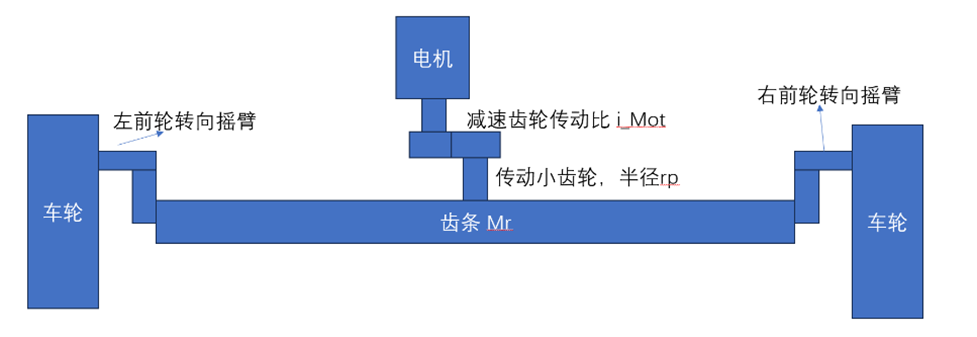
1、Rwa转向执行总成建模
Rwa包括齿轮齿条机构、转向组件以及转向执行电机;如下图,电机输出轴通过齿轮减速增扭后,再经过一个半径为rp的小齿轮,直接带动齿条左右移动。齿条的移动通过转向摇臂,带动车轮转动,整套系统从电机的转动,转换为齿条的左右移动,再转换成车轮的左右摆动。
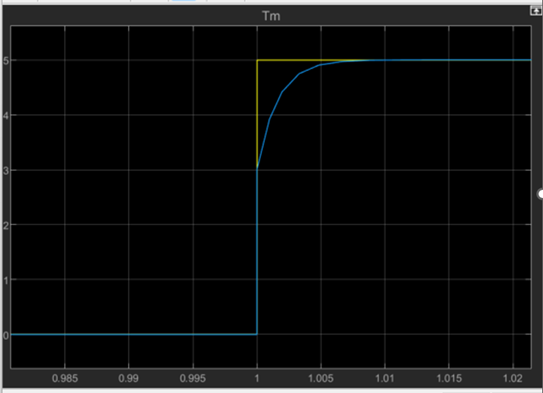
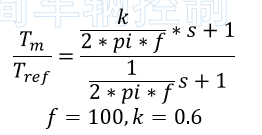
1.1.1电机建模
我们仿真的重点不在于电机控制,因此电机可以简化建模,用一个一阶传递环节代替。一阶惯性环节的像以前曲线如下:
1.1.2Rwa转向执行总成建模
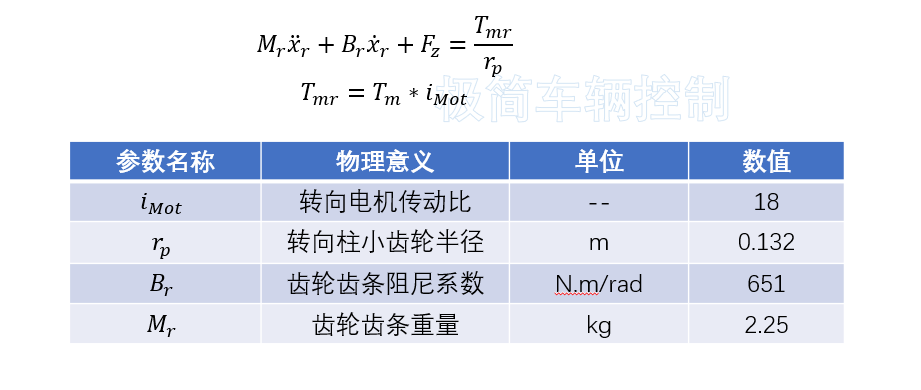
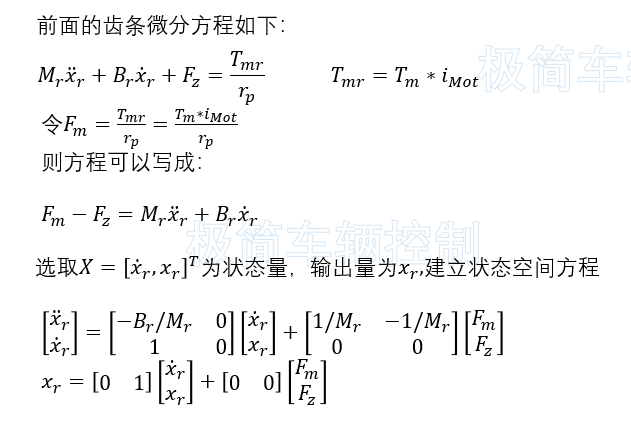
齿轮齿条动力来源是电机经过传动比i_mot后经转向管柱作用在齿条上的力 F=Tmr/rp,阻力为车轮传递到齿条阻力F_z,齿条自身的加速度分量和阻尼阻尼分量,依据牛顿力学第二定律有:
2、角度跟踪仿真模型建立
2.1 carsim仿真模型
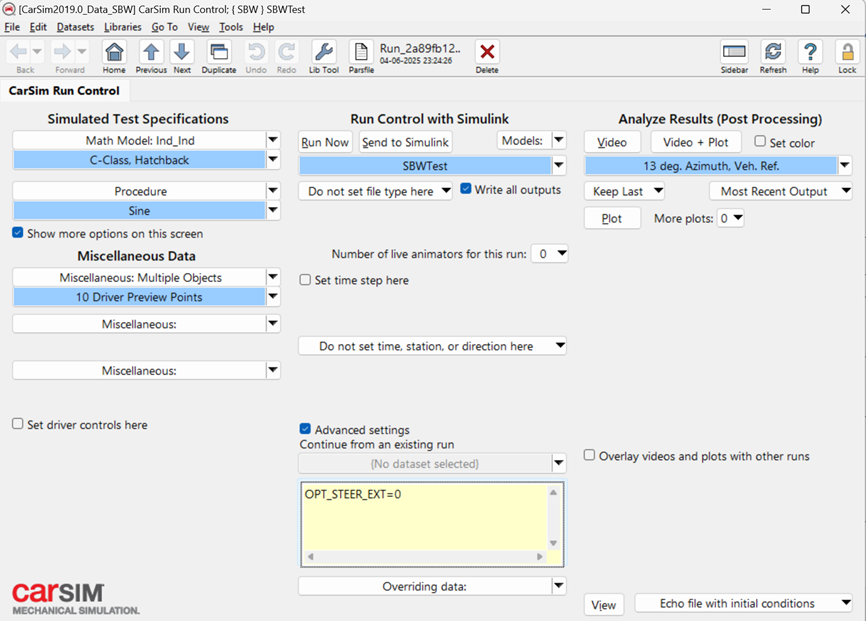
Carsim与Simulink交互接口

2.2 角度跟踪simulink模型
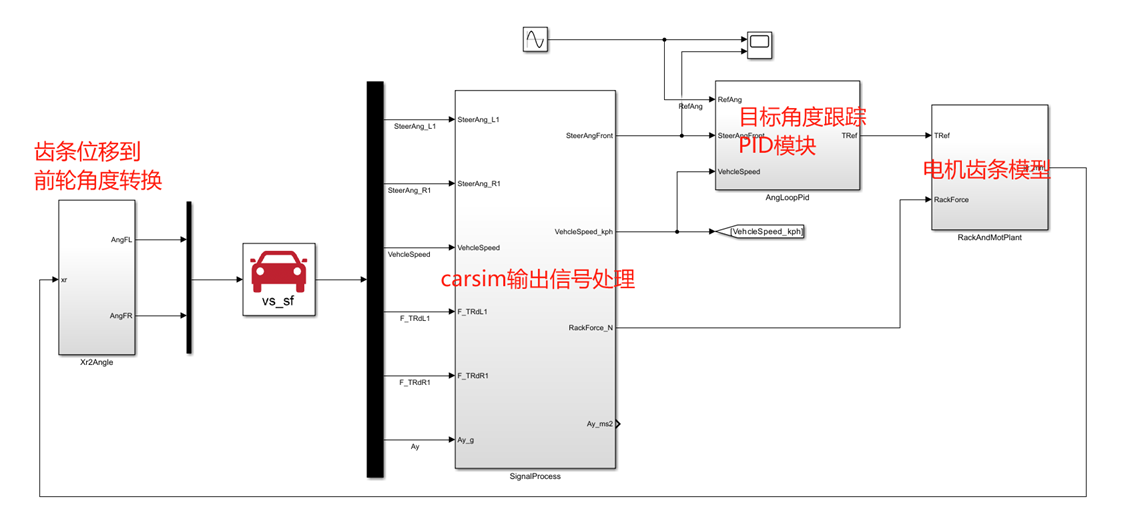 Carsim输出信号处理:信号滤波,信号单位转换;
Carsim输出信号处理:信号滤波,信号单位转换;
角度跟踪PID模块:实现目标角度与前轮角度跟踪;
电机齿条模型:依据RWA执行器总成建模微分方程搭建;
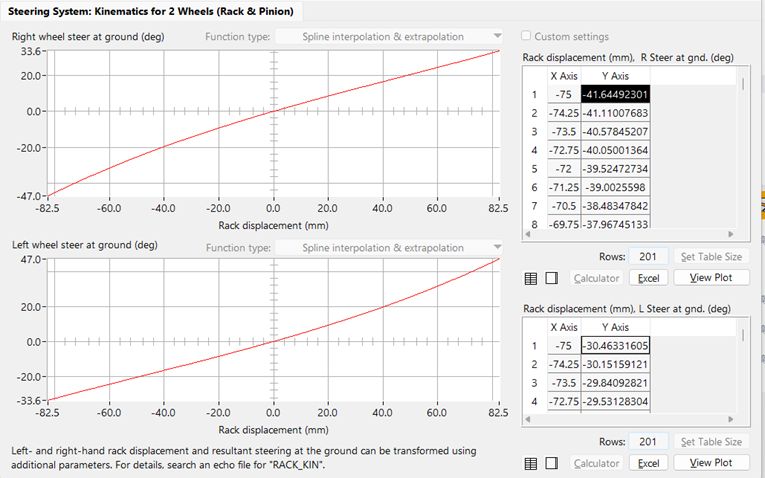
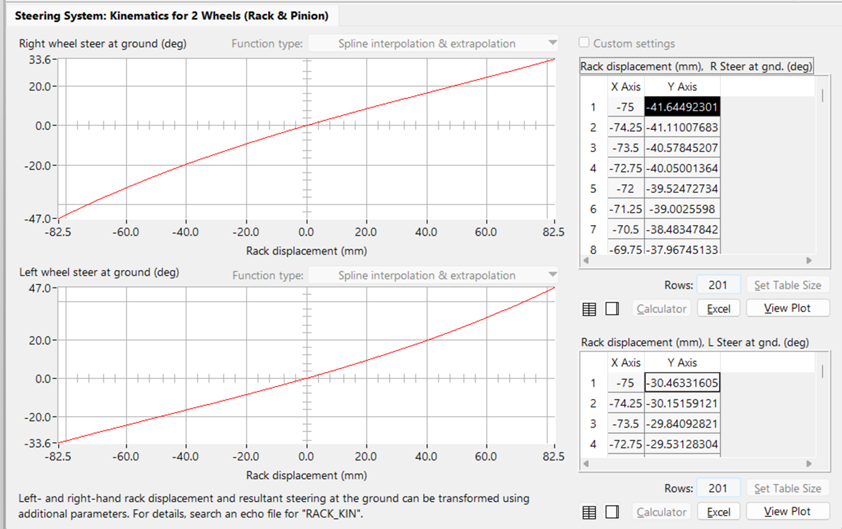
齿条位移到前轮转角转换:依据转向轮转角—齿条位移表格,将齿条换算到前轮转角,如下图
2.3 仿真数据流
1)根据车辆模型实时转角与参考转角的差距,用pid算出需求电机需求力矩;
2)一阶电机模型响应电机需求力矩;
3)有了电机力矩,以及车辆模型的转向阻力,便可以由齿条模型得到齿条位移;
4)有了齿条位移,便可以查表得到左右前轮需要的转角,响应前轮需求转角就是carsim的事了。
5) Carsim将实际前轮转角,车速等信号反馈到Simulink。
3、目标角度跟踪仿真结果
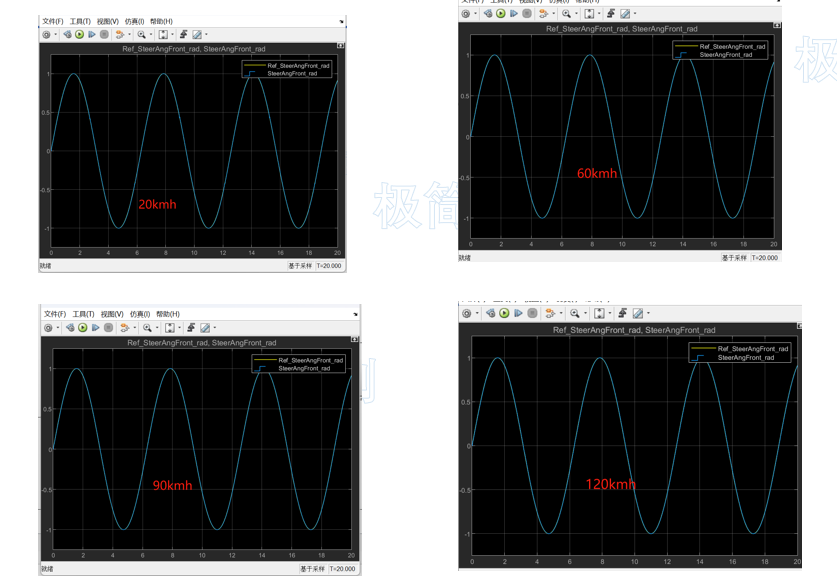
根据不同车速,设置可变的Pid参数,实现不同速度下角度跟踪均良好。
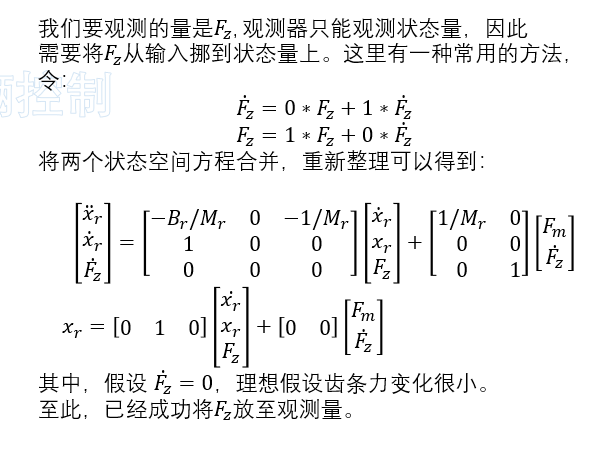
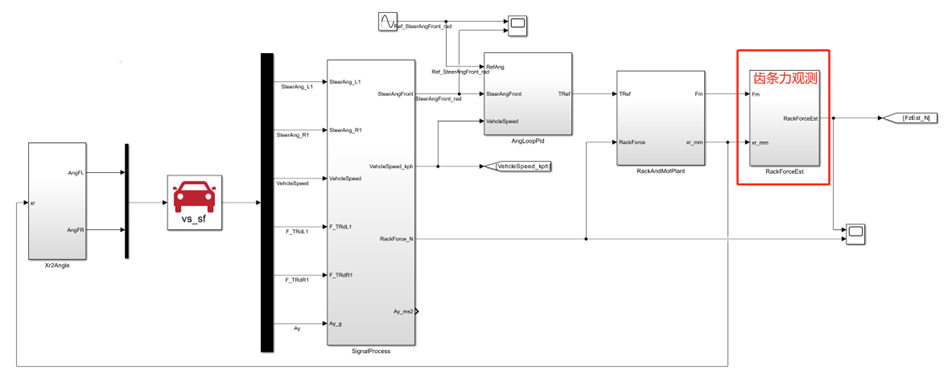
三、齿条力估算
观测器更详细的介绍文章可以关注博主以下三篇文章,齿条力估算这里使用matlab提供的卡尔曼滤波模块进行估算。
从小车倒立摆系统看系统建模控制LQR+LQE仿真-CSDN博客
好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_观测器极点配置-CSDN博客
三个实例迅速掌握经典卡尔曼滤波用法_卡尔曼滤波 温度估计-CSDN博客
1、系统状态空间方程
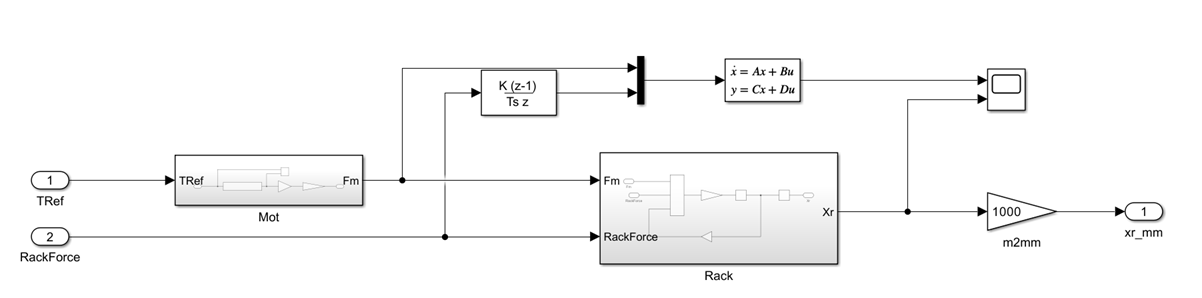
2、验证状态空间方程的准确性
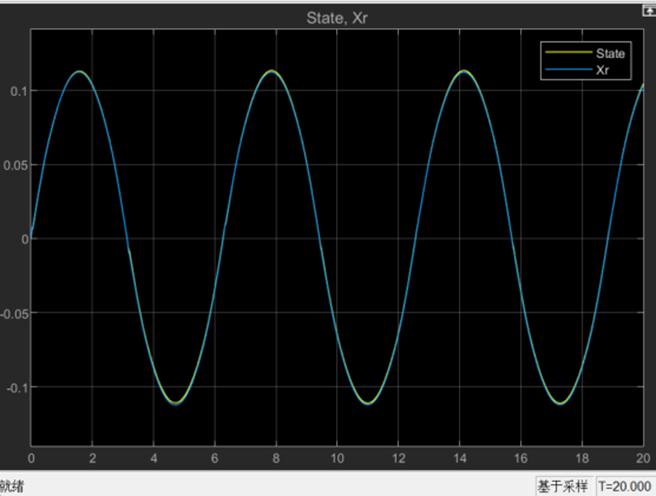
如下图所示,验证状态空间方程与物理模型的一致性。结果一致,可以用于状态观测器设计。
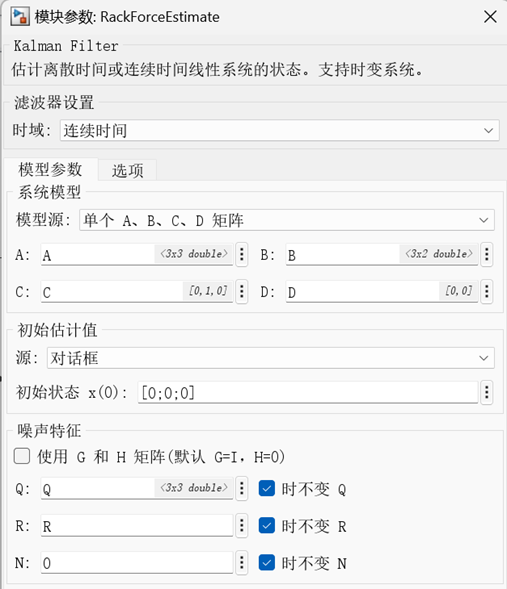
3、使用卡尔曼滤波模块进行齿条力估算
设置A,B,C,D四个状态矩阵,和QR矩阵。通过不断调试Q,R矩阵,可以调试得到观测齿条力与carsim输出齿条力接近的QR矩阵。
使用simulink自带的卡尔曼滤波模块
4、齿条力估算仿真结果

对比仿真,估计的齿条力与carsim的齿条力很接近。
四、Hwa机械建模和手力跟踪
1、Hwa机械建模
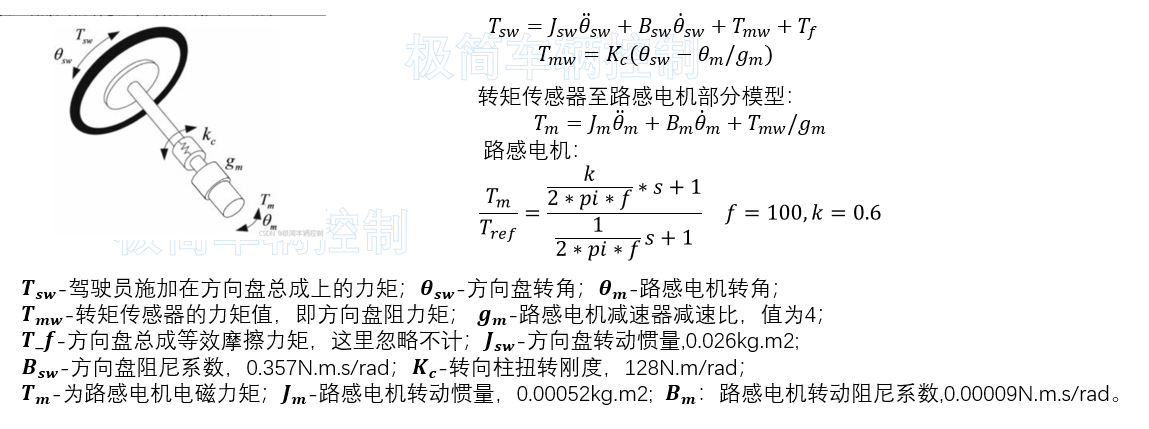
方向盘总成能够接收驾驶员转向指令和传递路感, 其结构主要包括方向盘、 路感模拟电机及减速器、 转角和转矩传感器等,简化结构如下图所示。驾驶员通过方向盘施加驱动力矩,克服总成里的摩擦力,电机阻力;控制器通过控制电机产生的阻力,便可以产生所谓的手感。因为线控转向里,方向盘跟路面没有直接关系,因此,驾驶员操纵方向盘的手感主要来源于电机产生的阻力矩。根据牛顿第二定律对方向盘总成和电机进行建模,方向盘到转矩传感器部分模型如下:
2、根据微分方程建立Simulink模型
如下图所示,Hwa机械模型的输入有两个
1)、T_sw:驾驶员操作扭矩,对控制来说,这部分未知,不可测,无规律,只能当做干扰信号;
2)、T_mref:助力电机请求力矩;
由于实际产品中,控制器只能采集扭矩和角度信号,因此机械建模时,只留两个输出:
1)、T_mw:扭矩传感器扭力值
2)、theta_sw :方向盘转角。
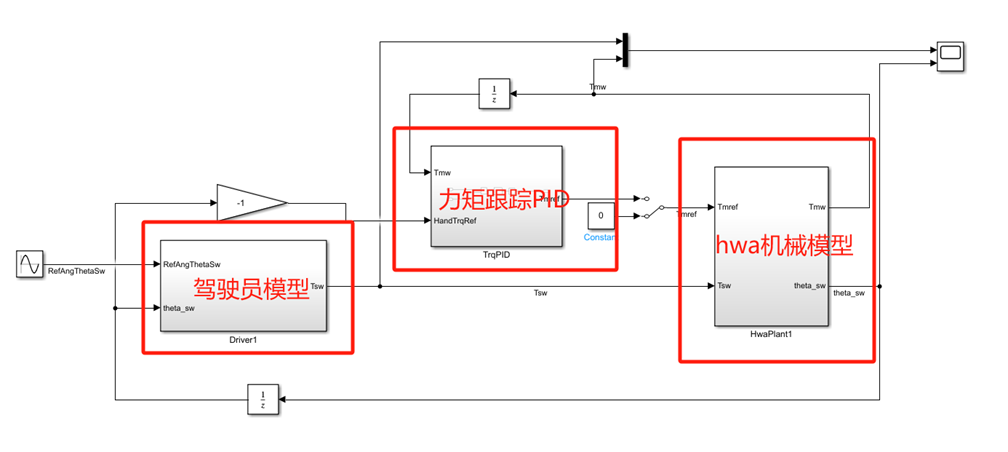
- 1) 、驾驶员模型:模拟人打方向的过程,人打方向也是一个pid调节的过程,只是这pid在咱大脑里运行。
2)、力矩跟踪pid:使得机械模型的力矩Tmw按照我们期望的HandTrqRef走。Tmw表征方向盘的轻重,也就是手感大小。由于驾驶员的手力输入无法测量和预测,因此Tsw只能当做干扰,在有干扰的情况下pid应该自动调节Tmref,控制电机产生力,使得Tmw跟踪上HandTrqRef。
3)、hwa机械模型:即被控对象。 -
3、驾驶员角度控制与手力跟踪仿真
-
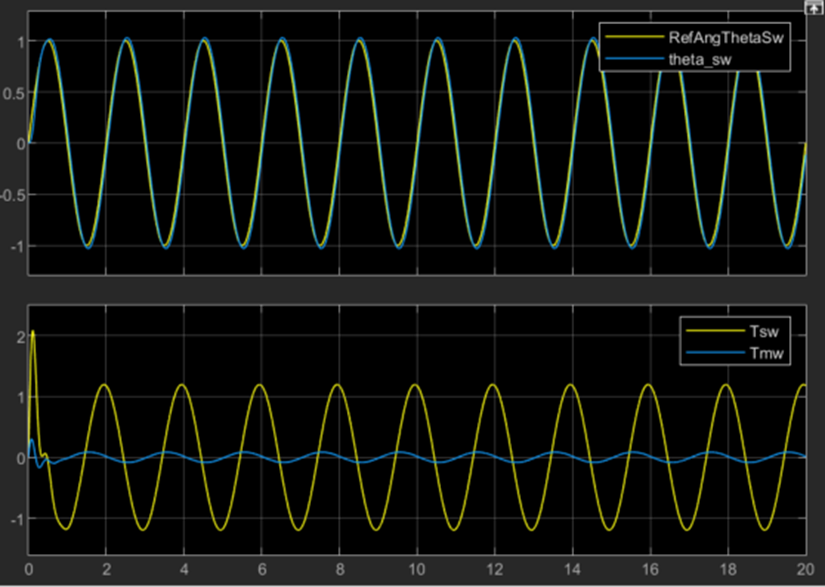
断开力矩跟踪Pid到机械模型的输入。调试驾驶员模型角度Pid参数,使得参考角度跟踪上了实际角度,但是此时转向管柱位置的扭矩值T_mw却很小,说明此时方向盘很轻。T_sw即驾驶员手力只要作用在克服方向方向盘惯量上,因此毫不费劲便可打动方向盘。
在线控转向手感模拟中,驾驶员手臂真正出的力矩T_sw我们无法得知,调试手感只能参考转向管柱扭矩传感器T_mw的数值。
-
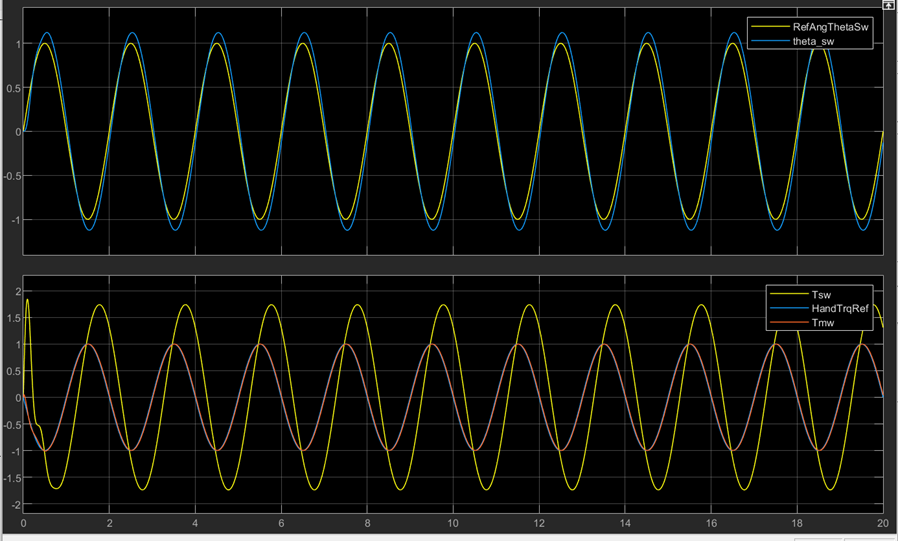
将力矩闭环PID开关连接上,并调试力矩闭环模块的pid参数。如下图所示,T_mw数值与参考的HandTrqRef一致,能实现跟踪。说明力矩闭环模块已经调试完成,为后续手感模块开发做了基础。
五、Hwa与Rwa联动仿真
1、Carsim中方向盘转角至前轮转角的转换
1)、C factor方向盘转角至齿条位移传动比,方向盘转动一圈,齿条移动44.12mm。
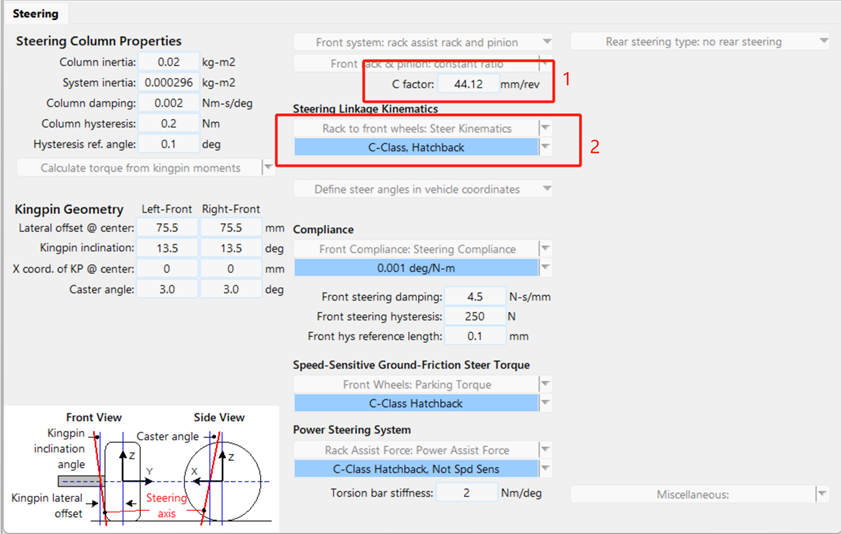
2)、齿条位移—前轮转角曲线,通过齿条位移,可以查表得到前后轮转角。
-
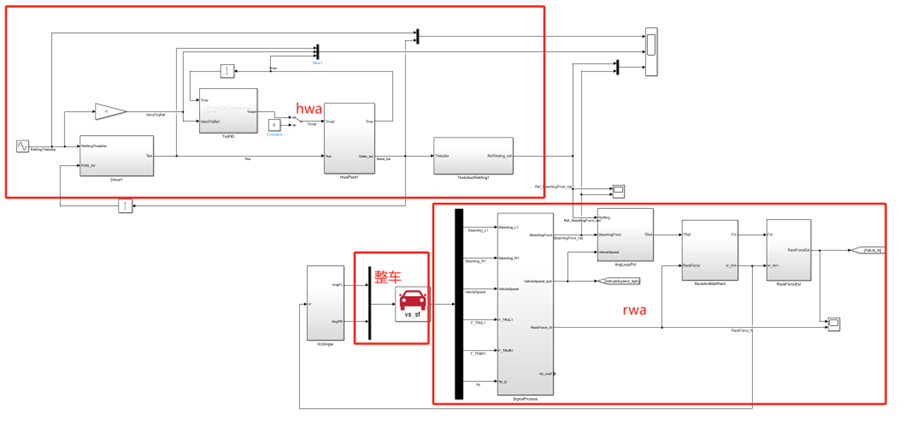
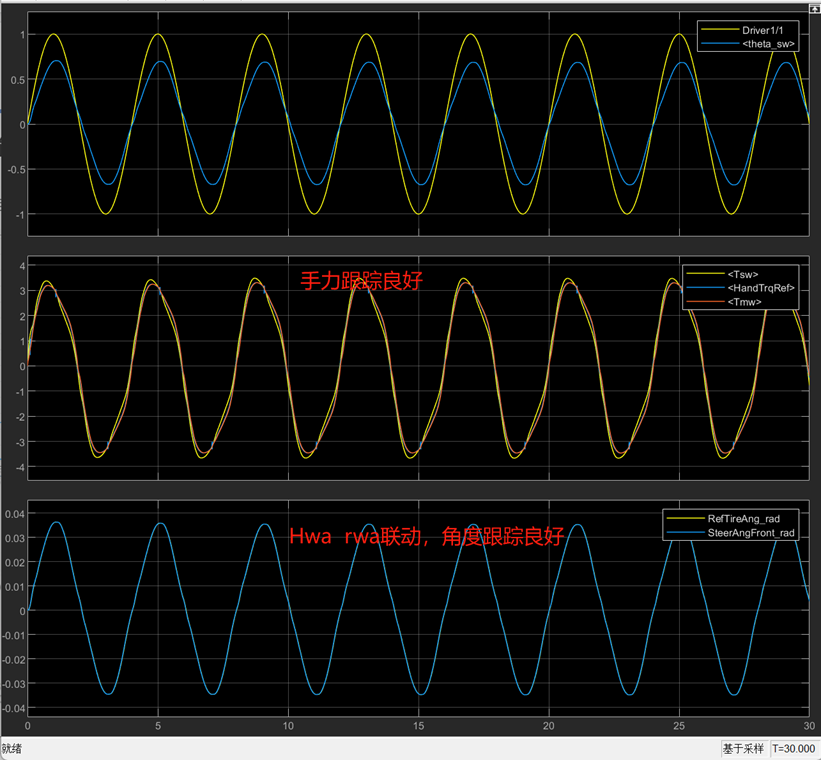
2、整车角度跟踪
将Hwa与Rwa参考角度相连。这样仿真模型已经很清晰。驾驶员打方向盘,hwa电机产生手感阻力,同时输出需求车轮转角。RWA接受需求转角,驱动电机,移动齿条产生前轮转角,输入到carsim。Carsim再将车辆动态信息返回到simulink模型。
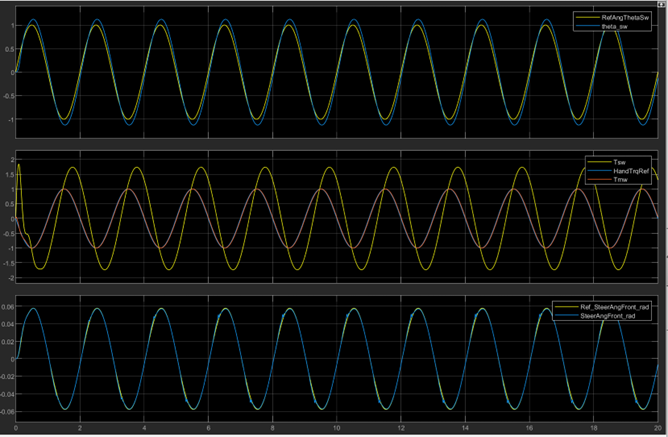
 运行仿真,车速120,0.5hz频率打方向盘,车辆能正常响应。
运行仿真,车速120,0.5hz频率打方向盘,车辆能正常响应。
六、Hwa参考力矩计算(手感模拟)
手感模拟模块可以参考了以下两篇论文:

参考力矩计算框架
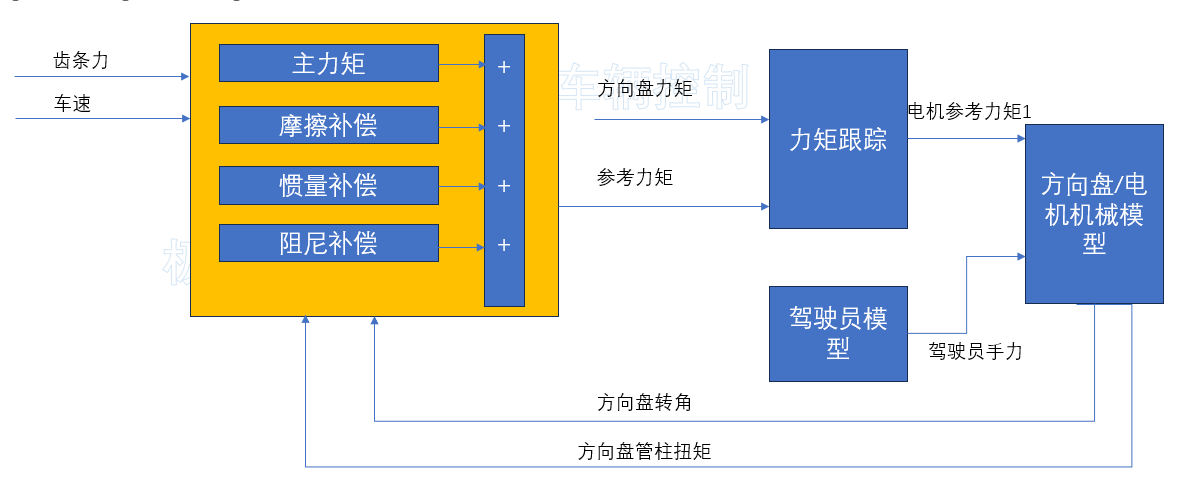
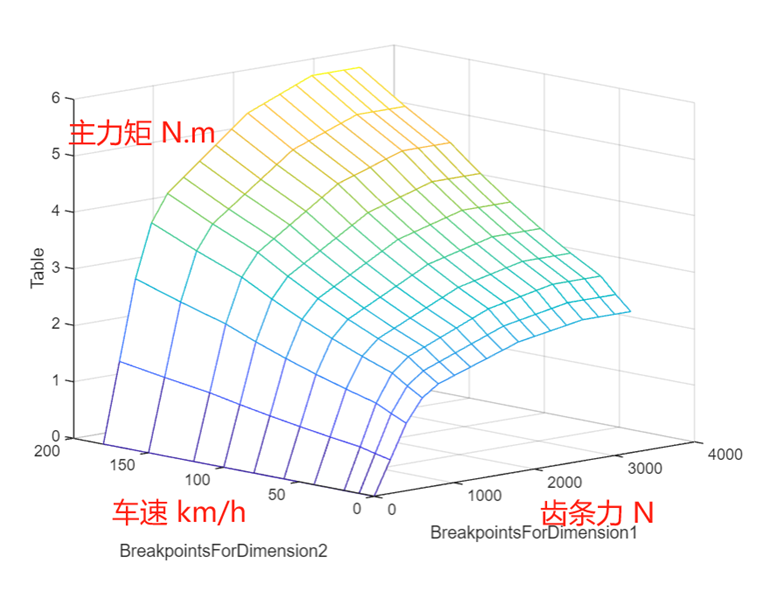
1、主力矩计算
在EPS中,转向阻力来源是真实轮胎转向阻力,助力电机的作用是提供助力,减轻驾驶员的负担。线控转向恰好相反,由于方向盘与车轮之间没有直接的机械链接,驾驶员手感全部来自于电机,因此hwa电机提供的是阻力。
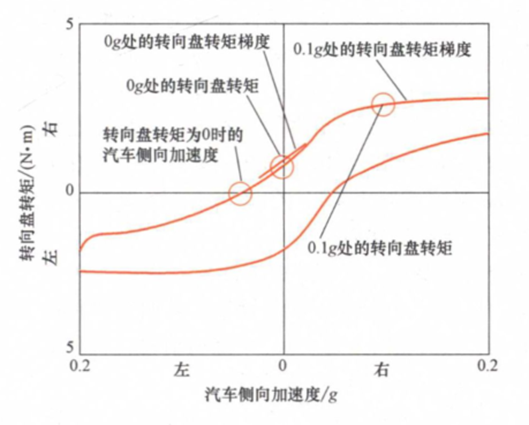
线控转向hwa主力矩设计的目的是模拟EPS的助力特性,即要转向轻便,体现不同车速特征,又要保留清晰路感,因此可以通过齿条力和车速进行查表重构。主力矩需要满足如下特性:
1)低速或原地转向时,为了得到驾驶员驾驶需要的反馈信息,应该由反力电机模拟出一个较小的主力矩;
2)中速行驶时,首先要满足一定的转矩梯度,且随着加速度增加,主力矩增长放缓,也就是转矩梯度逐渐变小;
3)高速行驶时,随着侧向加速度增加,主力矩应该平滑变化;
4)一般乘用车转矩梯度为 13~20Nm/g。
依据助力特性,设置主力军曲线如下:
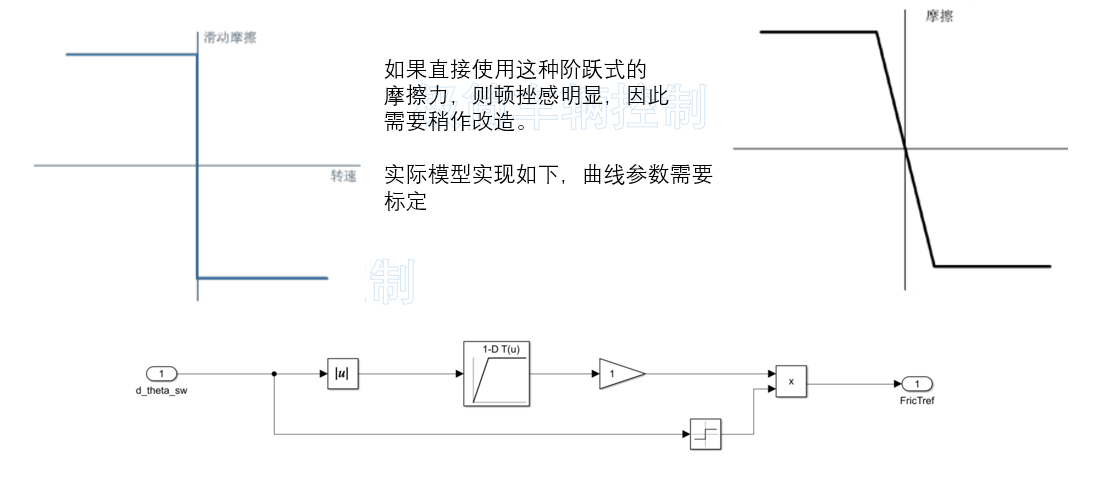
2、摩擦补偿
线控转向由于构造的原因,摩擦力非常小(我们此次的hwa建模甚至直接忽略了摩擦力)。增加摩擦补偿,可以使得手感更加真实。摩擦力是阻碍物体相对运动或相对运动趋势的力,当物体移动速度为0时,摩擦力主要为静摩擦,随着动力的增加,静摩擦也随着增加直到物体移动,此时摩擦力是动摩擦,动摩擦是一个定值。
3、惯量补偿
转向系统的转动惯量只要由方向盘的角加速度引起,角加速度越大,惯性力越大。
转向系统的惯性力表达式为:Ti=Jh*(dwh/dt);式中,wh为转向盘的角速度,Jh为转向盘转动惯量,TI为转向盘模块的惯性力矩。如果从上式得到惯量补偿力矩,由于dwh是方向盘转角的两次微分得到的结果,会引入特别多早上,因此不建议直接使用。
这里采用间接方法,通过转向盘力矩微分得到惯性力补偿,Ti=K*dTh/dt,K 为标定参数,Th为转向管柱力矩。模型实现如下:

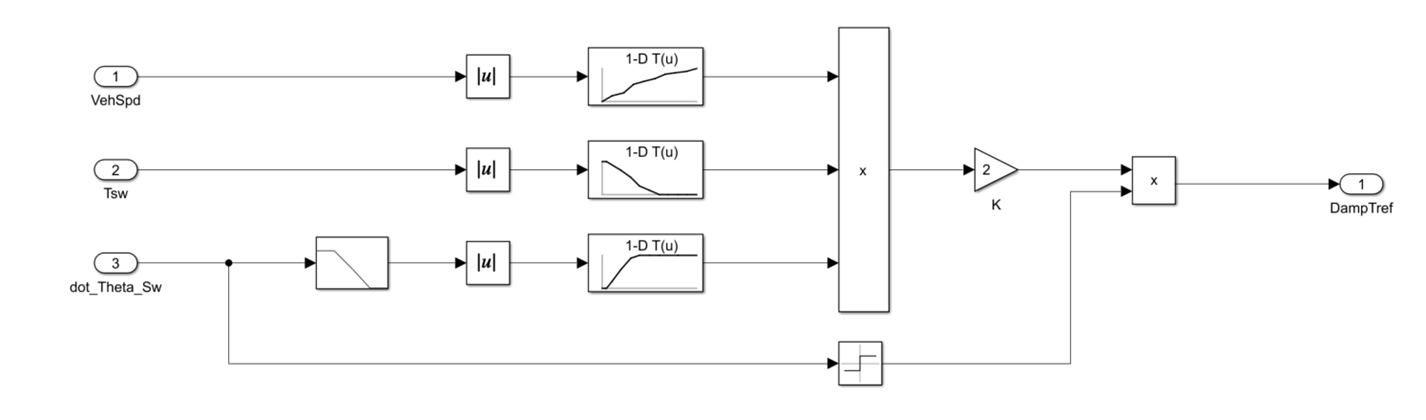
4、阻尼补偿
在EPS中,汽车高速行驶时,驾驶员的注意力高度集中,此时驾驶员对转向盘的波动格外敏感,而恶劣的路况往往会导致转向盘的波动,增加驾驶员的负担,阻尼补偿主要作用便是去除不必要的高频小幅度信号波动。
转向系统阻尼补偿主要针对方向盘转速进行补偿,T_d=B∗(dθ_h)/dt, T_d :阻尼力矩,θ_h:转向盘转角 B:增益系数。
此外,由于车辆的侧向力回正力矩随车速变化明显,因此也需要随车速来调整阻尼;为了防止超调震荡,转向盘转速越快,阻尼系数应该越大,阻尼力矩也越大;最后,如果管柱力矩过小(可能驾驶员撒手),则此时不能施加阻尼力矩。考虑以上几点,模型实现如下:
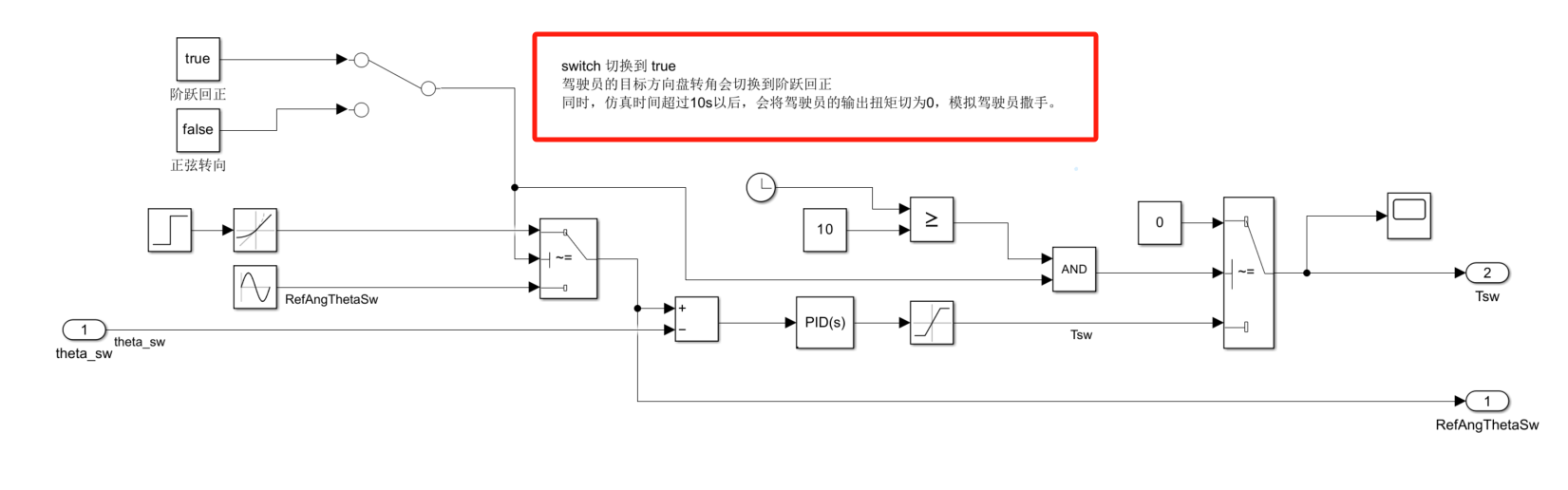
七、模型整体说明和整体仿真
1、模型整体
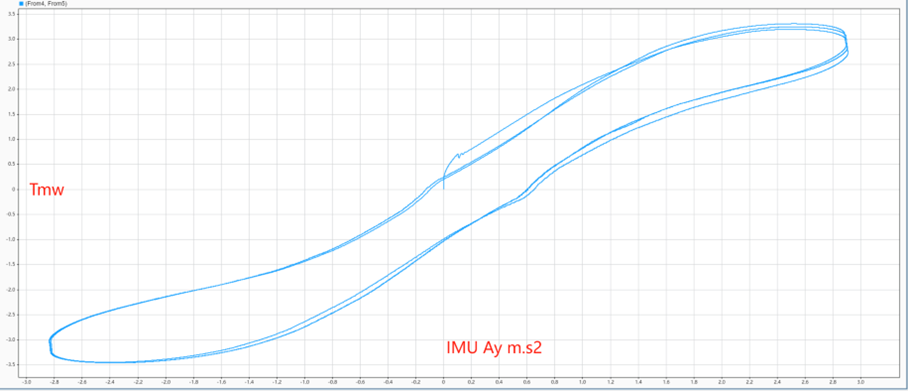
2、手力功能测试验证
60km/h 方向盘0.25hz 幅值1rad输入 与汽车理论中侧向加速度—转向盘转矩有几分相似了。细微差异点需要通过调整前面5个模块的查表参数以及增益参数,不断的来回调,来回仿真验证。
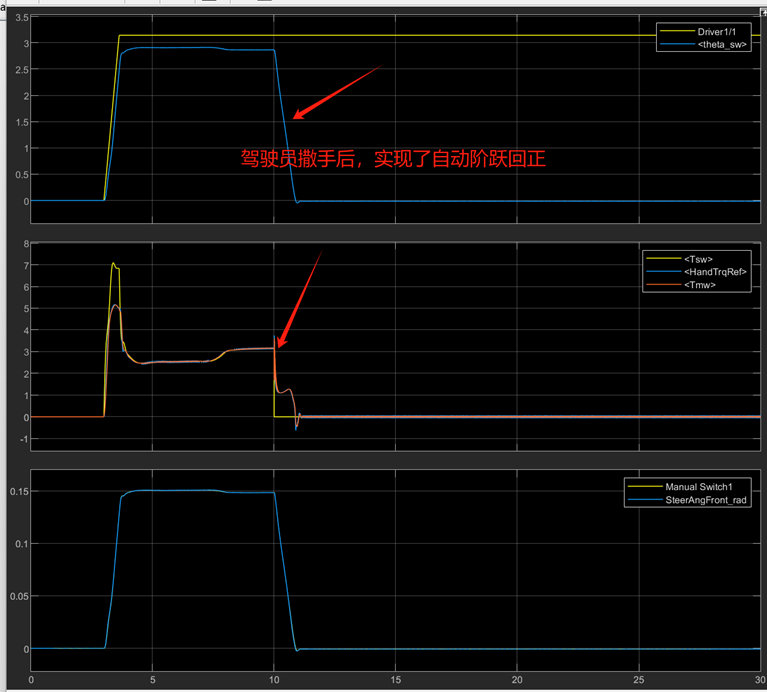
3、自动回正测试
由于hwa手感是基于齿条力来的,齿条力又包含了轮胎侧偏回正力矩,因此,没有回正模块的情况下,对于驾驶员的阶跃输入,仍能实现车辆仍能实现回正。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











