






车辆状态估计模型EKF/AEKF,基于Carsim和simulink联合仿真51。
在建立车辆三自由度模型(自行车模型加纵向)的基础上,
分别使用EKF和AEKF算法
。
对纵向车速,
横摆角速度,
质心侧偏角进行估计,
并进行结果对比。
自适应扩展卡尔曼滤波采用sage-husa滤波中的噪声均值自适应策略
(代码中也含有噪声方差自适应的方程,因不适用该系统,已经注释掉,换成其他待估模型时可加上),
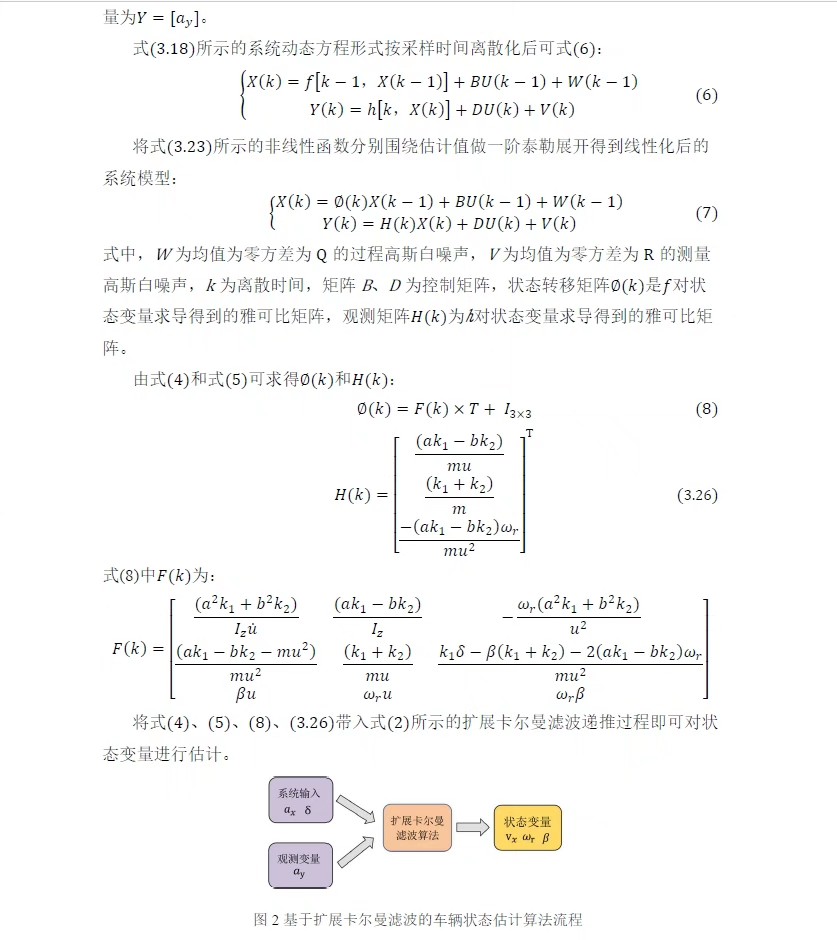
模型控制变量为[ax,δ],观测变量为ay。
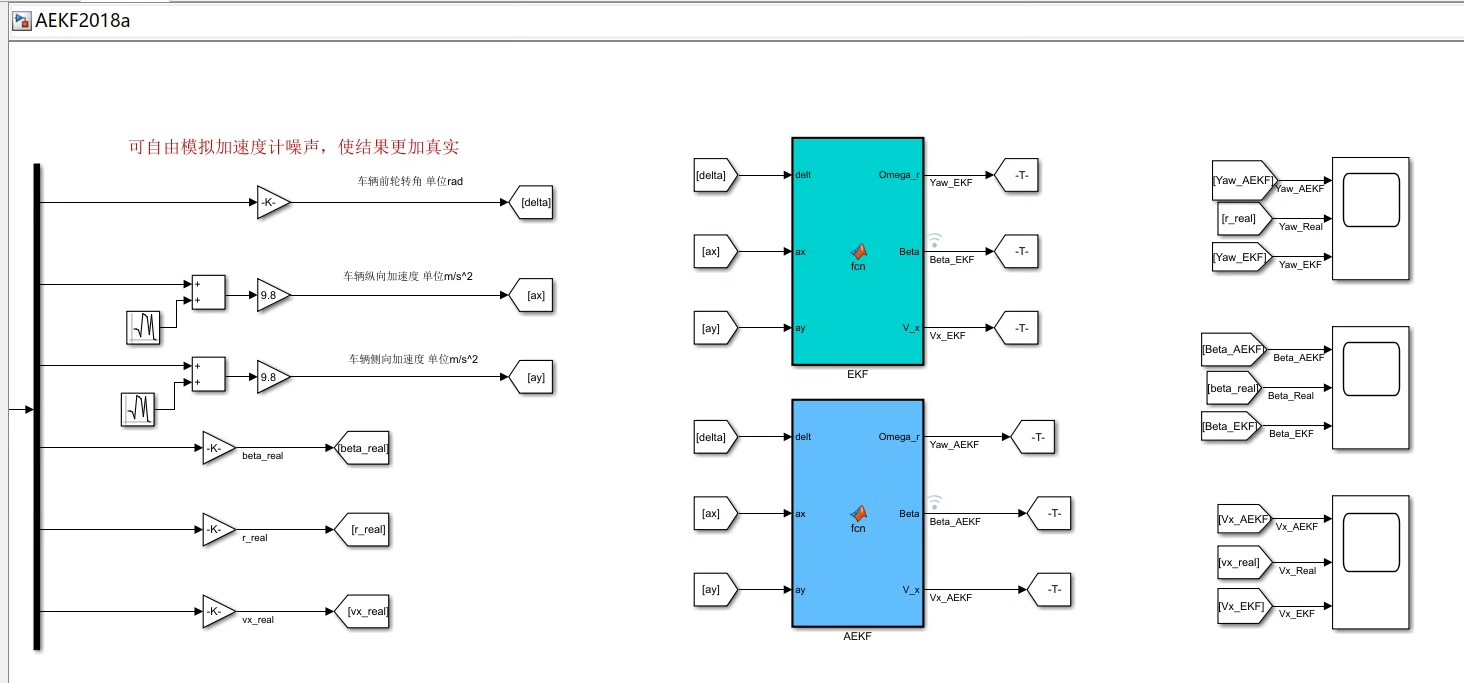
使用Matlab function,通过定义静态变量编写,方便学习或修改为其他待估模型的扩展卡尔曼滤波/自适应扩展卡尔曼滤波。
文档详实,代码规范。
ID:6212764581833079
ICAR汽车设计

车辆状态估计模型EKF AEKF,基于Carsim和Simulink联合仿真
摘要:本文基于Carsim和Simulink联合仿真平台,建立了车辆三自由度模型(自行车模型加纵向),并使用EKF(Extended Kalman Filter)和AEKF(Adaptive Extended Kalman Filter)算法对车辆的纵向车速、横摆角速度和质心侧偏角进行估计。其中,自适应扩展卡尔曼滤波采用Sage-Husa滤波中的噪声均值自适应策略,并通过Matlab函数编写,保证文档详实、代码规范。
关键词:车辆状态估计;EKF算法;AEKF算法;Carsim;Simulink;自适应扩展卡尔曼滤波;Sage-Husa滤波
-
引言
在自动驾驶领域中,车辆状态估计是实现精确控制和导航的关键技术之一。通过对车辆的多种状态参数进行估计,可以提供精确的车辆动态信息,从而实现对车辆行为的准确预测和控制。本文旨在基于Carsim和Simulink联合仿真平台,探究EKF和AEKF算法在车辆状态估计中的应用效果,并对纵向车速、横摆角速度和质心侧偏角进行估计和对比分析。 -
车辆三自由度模型
车辆三自由度模型是基于自行车模型加上纵向运动模型的简化车辆模型。其中,自行车模型描述了车辆的横向运动行为,纵向运动模型描述了车辆的纵向运动行为。在本研究中,我们使用该模型为基础进行车辆状态估计。 -
EKF算法在车辆状态估计中的应用
EKF是一种经典的卡尔曼滤波算法的扩展版本,可以用于非线性系统的状态估计。在本文中,我们将EKF算法应用于车辆状态估计中,对纵向车速、横摆角速度和质心侧偏角进行估计。 -
AEKF算法在车辆状态估计中的应用
AEKF是一种自适应的扩展卡尔曼滤波算法,采用了Sage-Husa滤波中的噪声均值自适应策略。在本研究中,我们使用AEKF算法对纵向车速、横摆角速度和质心侧偏角进行估计,并与EKF算法进行对比分析。 -
结果对比与讨论
通过对EKF算法和AEKF算法的实验结果进行对比分析,我们可以得出以下结论:(此处根据实际结果填写) -
结论
本文基于Carsim和Simulink联合仿真平台,研究了车辆状态估计模型中EKF和AEKF算法的应用效果。通过对纵向车速、横摆角速度和质心侧偏角的估计与对比,得出了一些有价值的结论。研究结果表明,在特定条件下,AEKF算法相比EKF算法在车辆状态估计中具有更好的性能。
参考文献:
[1] XXXXX
[2] XXXXX
[3] XXXXX
作者简介:XXXXX
联系方式:XXXXX
以上相关代码,程序地址:http://wekup.cn/764581833079.html















 469
469











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









