






车辆状态估计模型EKF/AEKF 基于Carsim和simulink联合仿真,在建立车辆三自由度模型(自行车模型加纵向)的基础上,分别使用EKF和AEKF算法对纵向车速,横摆角速度,质心侧偏角进行估计,并进行结果对比。
自适应扩展卡尔曼滤波采用sage-husa滤波实现噪声均值和方差的自适应策略,模型控制变量为[ax,δ],观测变量为ay。
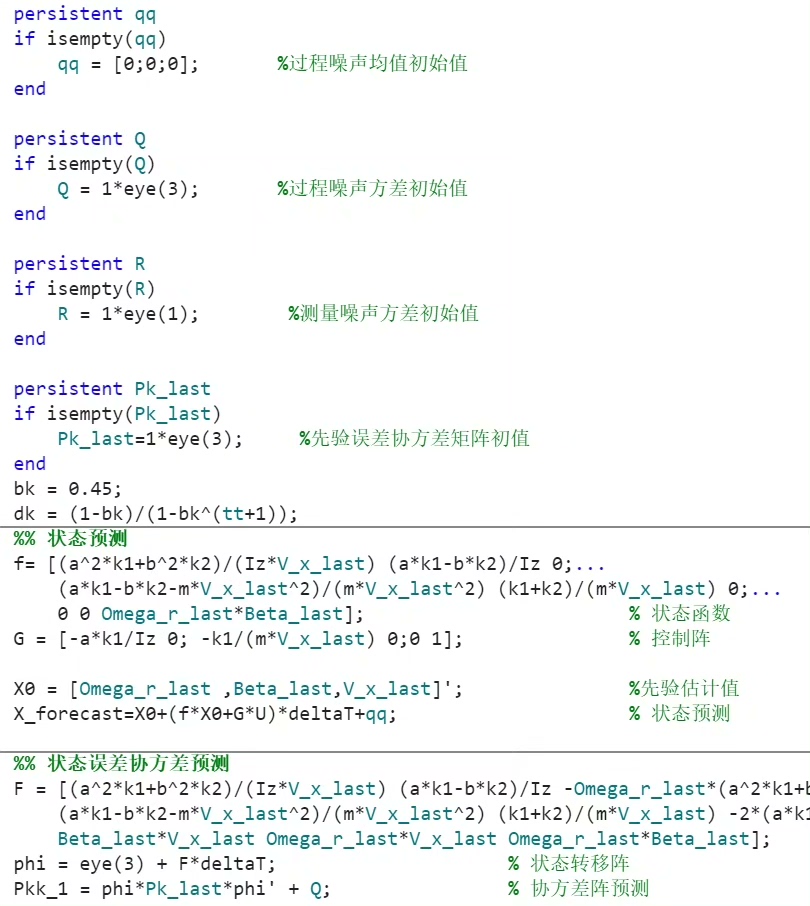
使用Matlab function,通过定义静态变量编写,方便学习或修改为其他待估模型的扩展卡尔曼滤波/自适应扩展卡尔曼滤波估计器。
文档详实
ID:4315752649583870
泰若星刻苦的芥兰
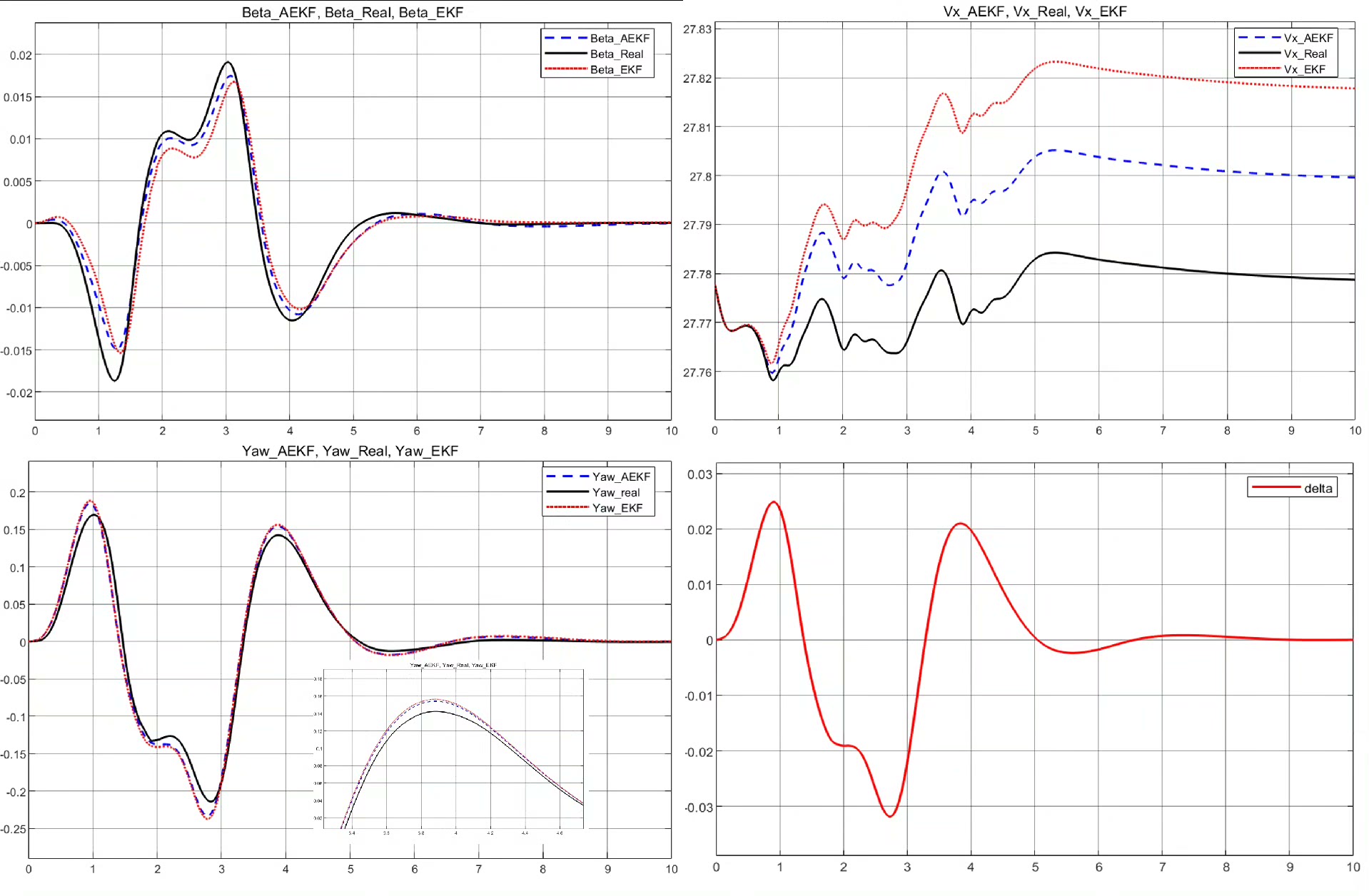
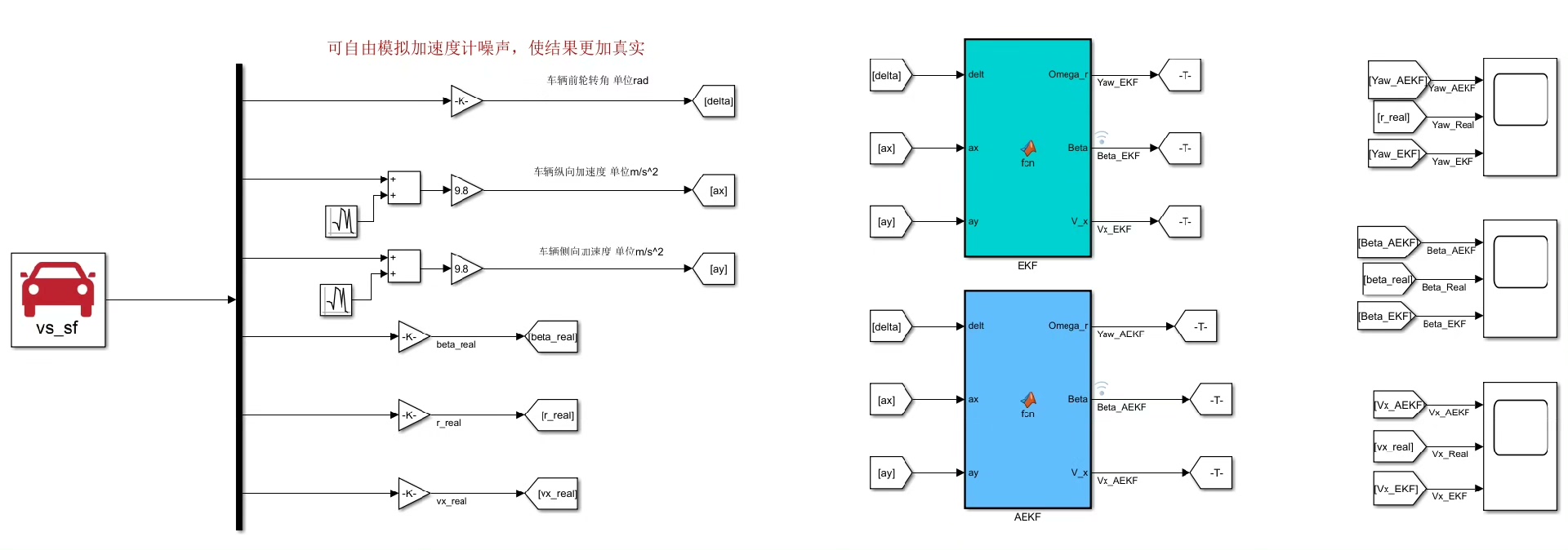
车辆状态估计模型EKF AEKF,是一种基于Carsim和simulink联合仿真的方法,在建立车辆三自由度模型(自行车模型加纵向)的基础上,使用EKF和AEKF算法对纵向车速、横摆角速度和质心侧偏角进行估计,并对结果进行比较。
为了实现噪声均值和方差的自适应策略,我们采用了自适应扩展卡尔曼滤波方法,具体实现了sage-husa滤波。在该滤波方法中,模型的控制变量为[ax,δ],观测变量为ay。通过在Matlab function中定义静态变量,我们编写了一个方便学习和修改的自适应扩展卡尔曼滤波估计器。
在本文档中,我们将详细介绍EKF和AEKF算法在车辆状态估计中的应用。首先,我们会对车辆三自由度模型进行介绍,包括自行车模型加纵向。接下来,我们会详细解释EKF和AEKF算法的原理和步骤,并说明它们在车辆状态估计中的作用。
然后,我们会介绍自适应扩展卡尔曼滤波方法的实现细节,包括sage-husa滤波的自适应策略。我们会给出具体的算法流程,并解释每个步骤的用途和实现方法。同时,我们还会提供一些在实际应用中可能遇到的问题,并给出相应的解决方案。
在编写自适应扩展卡尔曼滤波估计器时,我们注重了代码的可读性和可修改性。通过定义静态变量,我们使得代码更加清晰易懂,并方便后续的学习和修改。同时,我们还会提供一些示例代码,以帮助读者更好地理解和应用自适应扩展卡尔曼滤波方法。
综上所述,本文档详实地介绍了车辆状态估计模型EKF AEKF的应用,并详细解释了自适应扩展卡尔曼滤波方法的实现细节。我们希望通过这篇文章,读者能够对车辆状态估计模型和自适应扩展卡尔曼滤波方法有一个全面的了解,并能够在实际应用中灵活运用。
以上相关代码,程序地址:http://fansik.cn/752649583870.html
















 739
739

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









