







项目框架

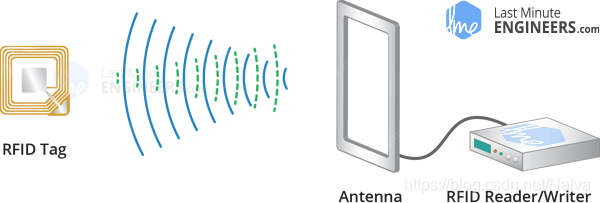
射频识别(Radiofrequency identification ,RFID),又称电子标签(E-Tag),是一种利用射频信号自动识别目标对象并获取相关信息的技术。RFID或射频识别系统由两个主要组件组成,一个是附加到要识别的对象上的应答器/标签,另一个是也称为询问器/阅读器的收发器。
射频部分是非接触式IC卡读写器的关键部件,通过该部分与非接触式IC卡进行数据通信。射频部分的主要部件就是射频基站芯片,这里选用的是MFRC522。
阅读器由射频模块和产生高频电磁场的天线组成。另一方面,标签通常是无源设备,这意味着它不包含电池。相反,它包含一个用于存储和处理信息的微芯片,以及一个用于接收和发送信号的天线。
要读取标签上编码的信息,将其放置在阅读器附近(不需要在阅读器的直接视线范围内)。读取器产生电磁场,该电磁场使电子移动通过标签的天线,然后为芯片供电。
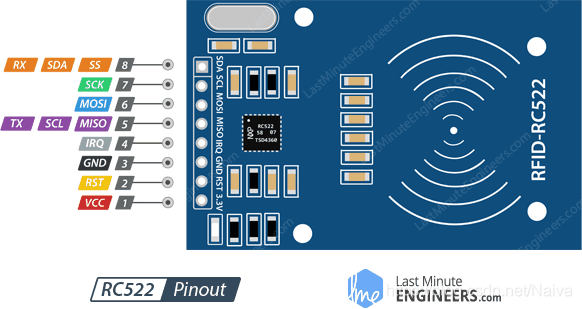
RC522 RFID模块引脚排列
| 名称 | 说明 |
|---|---|
| VCC | 为模块供电。这可以是2.5至3.3伏的任何电压。您可以将其连接到Arduino的3.3V输出。请记住,将其连接到5V引脚可能会损坏您的模块! |
| RST | 复位和掉电的输入。当此引脚变为低电平时,将启用硬断电功能。这将关闭所有内部电流吸收器,包括振荡器,并且输入引脚与外界断开。在上升沿,模块被重置。 |
| GND | 是接地引脚,需要连接到单片机的GND引脚。 |
| IRQ | 是一个中断引脚,可以在RFID标签进入微控制器附近时向微控制器发出警报。 |
| MISO / SCL / Tx | 当使能SPI接口时,MISO / SCL / Tx引脚充当主从从输出;当使能I2C接口时,MISO / SCL / Tx引脚充当串行时钟;当使能UART接口时,MISO / SCL / Tx引脚充当串行数据输出。 |
| MOSI | MOSI(主输出从机输入)是RC522模块的SPI输入。 |
| SCK | SCK(串行时钟)接受SPI总线主设备(即Arduino )提供的时钟脉冲。 |
| SDA / SS/Rx | 启用SPI接口时,SS / SDA / Rx引脚用作信号输入;启用I2C接口时,SS / SDA / Rx引脚用作串行数据;启用UART接口时,SS / SDA / Rx引脚用作串行数据输入。该引脚通常通过将引脚封装在一个正方形中来进行标记,因此可以用作识别其他引脚的参考。 |
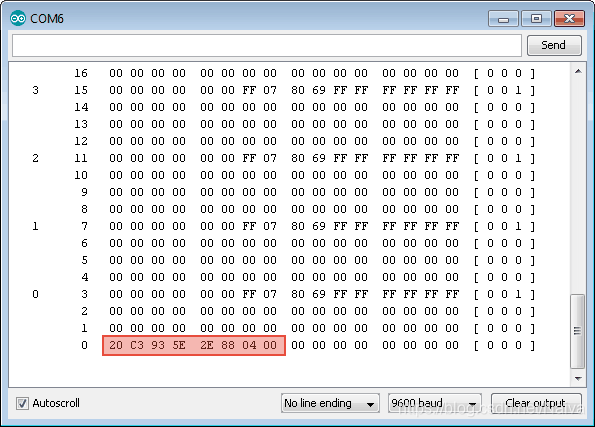
MIFARE Classic 1K内存布局
Tag的1K存储器按16个扇区组织(从0到15),每个扇区又分为4 个块(块0到3)。每个块可以存储16个字节的数据(从0到15)。
那肯定告诉我们
16个扇区x 4个块x 16字节数据 等于 1024字节(1K内存)
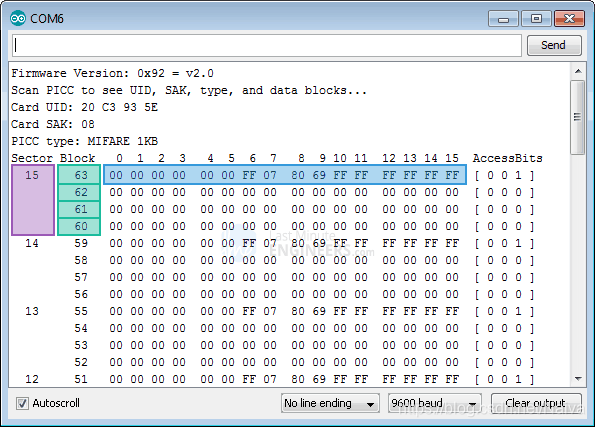
每个扇区的块3称为扇区尾部,其中包含称为访问位的信息,以授予对扇区中其余块的读写访问权限。这意味着每个扇区实际上仅底部3个块(块0、1和2)可用于数据存储,这意味着每64字节扇区中有48字节可用于我们自己的用途。
也扇区0的块0被称为制造商Block /制造商数据包含IC制造商数据,以及ü NIQUE ID entifier(UID)。制造商块在下面以红色突出显示。
单片机与RC522 RFID模块进行通信需要大量工作,更多管RC522的信息请参考[^5]
准备工作
测试前,需准备以下材料:
软件准备
- Keil编程软件/注册机(Keil软件安装与入门教程)
- STC_ISP程序下载助手
- 串口调试助手
端口定义
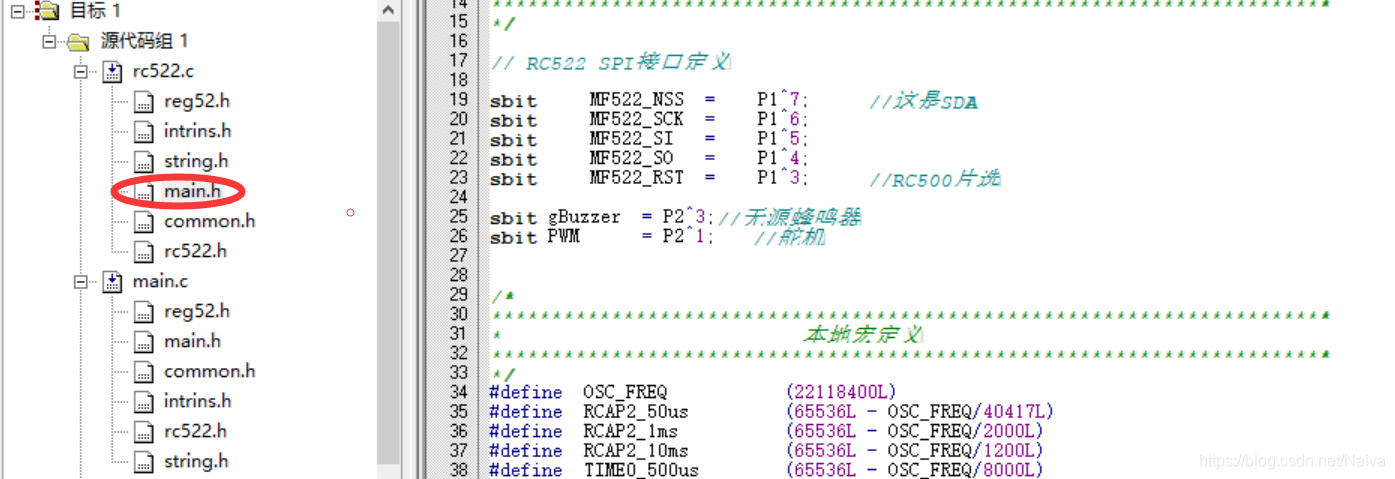
按程序中引脚定义连接 RC522 模块及开发板(引脚定义在 main.h 文件里面)。当然你也可以更改接线端口,只要把程序里面的单片机引脚定义成RFID的引脚就行。
// RC522 SPI接口定义
sbit MF522_NSS = P1^7; //这是SDA
sbit MF522_SCK = P1^6;
sbit MF522_SI = P1^5;
sbit MF522_SO = P1^4;
sbit MF522_RST = P1^3; //RC500片选
sbit V_motor = P0^0; //振动电机
sbit A0 = P0^7;//语音播报模块引脚A0~A2
sbit A1 = P0^6;
sbit A2 = P0^5;
程序测试
- 流程设计

- 基于51单片机 RC522 的寻卡与防冲撞
if (PcdRequest(0x52, Temp) == MI_OK)//寻卡函数 0x52:寻卡方式 ;Temp:卡片类型代码Temp[4]
{
if (PcdAnticoll(UID) == MI_OK)//防冲撞 UID:卡片序列号,4字节 成功返回0 即MI_OK
{
}
}
总结:
1、Keil 编程软件版本破解问题。不破解软件代码会限制在 2K。且编译、构建项目的时候没有创建.hex文件,无法完成测试。直到破解后使用Keil uVision 3 更改测试代码才顺利创建新的可烧录.hex文件。
2、注册机闪出问题。断网、重启电脑用管理员权限运行程序。
3、KeiluVison5版本,打开测试工程程序,提示uvision device not found,如下图所示。
(暂未解决所以决定破解KeiluVison3,继续使用它,晚安~ 2020/3/11 AM1:33)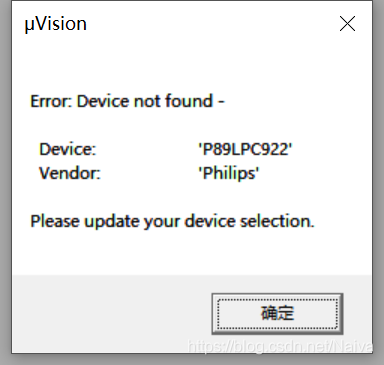
4、创建目标时错误提示:*** WARNING L16: UNCALLED SEGMENT, IGNORED FOR OVERLAY PROCESS 有函数实体却未被引用,因此连接器给出这个警告。
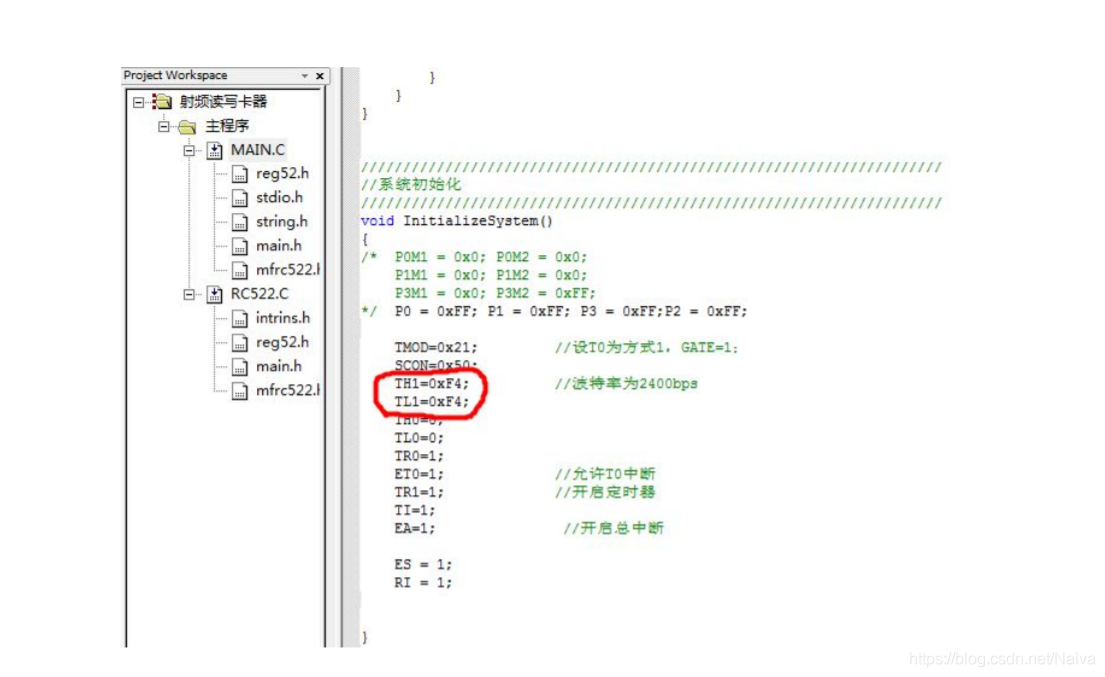
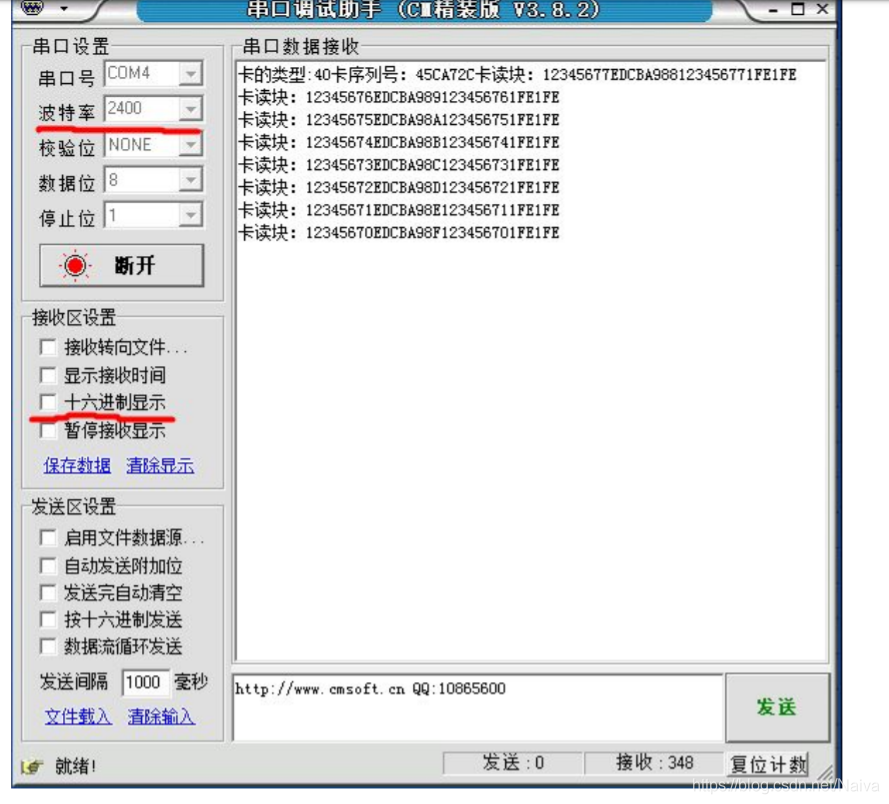
5、STC89C51单片机开发板端口、晶振设置问题导致读取不了RC522的UID问题。最后在网上从新买了两块纯净的单片机最小系统,重新配置系统初始化函数。配置可借助单片机小精灵V1.3工具,它会自动算出的2400波特率且波特率,这个工具会帮助我们计算波特率并且自动生成汇编/C语言代码。
void SysInit(void)
{
/
P0 = 0xFF; P1 = 0xFF; P3 = 0xFF;P2 = 0xFF;
TMOD=0x21; //设T0为方式1,GATE=1;
SCON=0x50;
//TH1=0xF4; //波特率为2400bps
//TL1=0xF4;
TH1=0xF4; //TH1 和 TL1 组合成timer1 16位定时器 晶振110592
TL1=0xF4;
TH0=0;
TL0=0;
TR0=1;
ET0=1; //允许T0中断
TR1=1;
//开启定时器
TI=1;
EA=1; //开启总中断
ES = 1;
RI = 1;
// gBuzzer = 0;
}
注 意:
1、RC522 模块供电电压必须为 3.3V ,不可以用 5V。也不可用电阻分压获得 3.3V用来供电。
2、如果您使用的是 12M 或者其它频率晶振,那么需要修改串口初始化函数。串口初始化函
数在 main.c 文件最后面,只需要修改 TH1 和 TL1 的值即可。当晶振为 12M 时:
TH1=0xF3;
TL1=0xF3;
3、串口调试助手 “十六进制显示”前面一定不要打钩。
参考资料
- [1] Arduino 项目笔记 |一种动车到站提醒装置(Mifare RFID-RC522模组实验&语音播放模块)
- [ 2] 基于单片机的RFID读写器设计
- [3] keil 多个.C 文件组织方法
- [4] 基于51单片机的RFID智能门禁系统
- [5] 【推荐】What is RFID? How It Works? Interface RC522 RFID Module with Arduino
- [6] 【推荐】基于单片机和RC522模块的宿舍门禁,刷手机开门,懒人工程师必备(教程四)
附录.
/******************rc522.h文件***********/
#ifndef __RC522_H__
#define __RC522_H__
/*
**********************************************************************
* 头文件包含
**********************************************************************
*/
#include "common.h"
/*
**********************************************************************
* 本地宏定义
**********************************************************************
*/
#define MAXRLEN 18
/
//Mifare_One卡片命令字
/
#define PICC_REQIDL 0x26 //寻天线区内未进入休眠状态
#define PICC_REQALL 0x52 //寻天线区内全部卡
#define PICC_ANTICOLL1 0x93 //选卡
#define PICC_ANTICOLL2 0x95 //防冲撞
#define PICC_AUTHENT1A 0x60 //验证A密钥
#define PICC_AUTHENT1B 0x61 //验证B密钥
#define PICC_READ 0x30 //读块
#define PICC_WRITE 0xA0 //写块
#define PICC_DECREMENT 0xC0 //扣款
#define PICC_INCREMENT 0xC1 //充值
#define PICC_RESTORE 0xC2 //调块数据到缓冲区
#define PICC_TRANSFER 0xB0 //保存缓冲区中数据
#define PICC_HALT 0x50 //休眠
/
//MF522命令字
/
#define PCD_IDLE 0x00 //取消当前命令
#define PCD_AUTHENT 0x0E //验证密钥
#define PCD_RECEIVE 0x08 //接收数据
#define PCD_TRANSMIT 0x04 //发送数据
#define PCD_TRANSCEIVE 0x0C //发送并接收数据
#define PCD_RESETPHASE 0x0F //复位
#define PCD_CALCCRC 0x03 //CRC计算
/
//MF522 FIFO长度定义
/
#define DEF_FIFO_LENGTH 64 //FIFO size=64byte
/
//MF522寄存器定义
/
// PAGE 0
#define RFU00 0x00
#define CommandReg 0x01
#define ComIEnReg 0x02
#define DivlEnReg 0x03
#define ComIrqReg 0x04
#define DivIrqReg 0x05
#define ErrorReg 0x06
#define Status1Reg 0x07
#define Status2Reg 0x08
#define FIFODataReg 0x09
#define FIFOLevelReg 0x0A
#define WaterLevelReg 0x0B
#define ControlReg 0x0C
#define BitFramingReg 0x0D
#define CollReg 0x0E
#define RFU0F 0x0F
// PAGE 1
#define RFU10 0x10
#define ModeReg 0x11
#define TxModeReg 0x12
#define RxModeReg 0x13
#define TxControlReg 0x14
#define TxAutoReg 0x15
#define TxSelReg 0x16
#define RxSelReg 0x17
#define RxThresholdReg 0x18
#define DemodReg 0x19
#define RFU1A 0x1A
#define RFU1B 0x1B
#define MifareReg 0x1C
#define RFU1D 0x1D
#define RFU1E 0x1E
#define SerialSpeedReg 0x1F
// PAGE 2
#define RFU20 0x20
#define CRCResultRegM 0x21
#define CRCResultRegL 0x22
#define RFU23 0x23
#define ModWidthReg 0x24
#define RFU25 0x25
#define RFCfgReg 0x26
#define GsNReg 0x27
#define CWGsCfgReg 0x28
#define ModGsCfgReg 0x29
#define TModeReg 0x2A
#define TPrescalerReg 0x2B
#define TReloadRegH 0x2C
#define TReloadRegL 0x2D
#define TCounterValueRegH 0x2E
#define TCounterValueRegL 0x2F
// PAGE 3
#define RFU30 0x30
#define TestSel1Reg 0x31
#define TestSel2Reg 0x32
#define TestPinEnReg 0x33
#define TestPinValueReg 0x34
#define TestBusReg 0x35
#define AutoTestReg 0x36
#define VersionReg 0x37
#define AnalogTestReg 0x38
#define TestDAC1Reg 0x39
#define TestDAC2Reg 0x3A
#define TestADCReg 0x3B
#define RFU3C 0x3C
#define RFU3D 0x3D
#define RFU3E 0x3E
#define RFU3F 0x3F
/
//和MF522通讯时返回的错误代码
/
#define MI_OK 0
#define MI_NOTAGERR (-1)
#define MI_ERR (-2)
/*
**********************************************************************
* 外部函数原型声明
**********************************************************************
*/
char PcdReset(void);
void PcdAntennaOn(void);
void PcdAntennaOff(void);
char PcdRequest(unsigned char req_code,unsigned char *pTagType);
char PcdAnticoll(unsigned char *pSnr);
char PcdComMF522(unsigned char Command,
unsigned char *pInData,
unsigned char InLenByte,
unsigned char *pOutData,
unsigned int *pOutLenBit);
void WriteRawRC(unsigned char Address,unsigned char value);
unsigned char ReadRawRC(unsigned char Address);
void SetBitMask(unsigned char reg,unsigned char mask);
void ClearBitMask(unsigned char reg,unsigned char mask);
char M500PcdConfigISOType(unsigned char type);
void delay_10ms(unsigned int _10ms);
char PcdSelect(unsigned char *pSnr);
char PcdAuthState(unsigned char auth_mode,unsigned char addr,unsigned char *pKey,unsigned char *pSnr);
char PcdRead(unsigned char addr,unsigned char *pData);
char PcdWrite(unsigned char addr,unsigned char *pData);
char PcdValue(unsigned char dd_mode,unsigned char addr,unsigned char *pValue);
char PcdBakValue(unsigned char sourceaddr, unsigned char goaladdr);
void CalulateCRC(unsigned char *pIndata,unsigned char len,unsigned char *pOutData);
#endif
/
//函数原型
/
/******************** rc522.c文件**************/
/*
**********************************************************************
* 头文件包含
**********************************************************************
*/
#include <reg52.h>
#include <intrins.h>
#include <string.h>
#include "main.h"
#include "rc522.h"
/*
**********************************************************************
* 本地全局变量
**********************************************************************
*/
// 专用SFR
sfr RCAP2LH = 0xCA;
sfr T2LH = 0xCC;
/****************RC522驱动源码**************************************/
/
//功 能:寻卡
//参数说明: req_code[IN]:寻卡方式
// 0x52 = 寻感应区内所有符合14443A标准的卡
// 0x26 = 寻未进入休眠状态的卡
// pTagType[OUT]:卡片类型代码
// 0x4400 = Mifare_UltraLight
// 0x0400 = Mifare_One(S50)
// 0x0200 = Mifare_One(S70)
// 0x0800 = Mifare_Pro(X)
// 0x4403 = Mifare_DESFire
//返 回: 成功返回MI_OK
/
char PcdRequest(unsigned char req_code,unsigned char *pTagType){
char status;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x07);
SetBitMask(TxControlReg,0x03);
ucComMF522Buf[0] = req_code;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,1,ucComMF522Buf,&unLen);
if ((status == MI_OK) && (unLen == 0x10))
{
*pTagType = ucComMF522Buf[0];
*(pTagType+1) = ucComMF522Buf[1];
}
else
{ status = MI_ERR; }
return status;
}
/
//功 能:防冲撞
//参数说明: pSnr[OUT]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAnticoll(unsigned char *pSnr)
{
char status;
unsigned char i,snr_check=0;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ClearBitMask(Status2Reg,0x08);
WriteRawRC(BitFramingReg,0x00);
ClearBitMask(CollReg,0x80);
ucComMF522Buf[0] = PICC_ANTICOLL1;
ucComMF522Buf[1] = 0x20;
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,2,ucComMF522Buf,&unLen);
if (status == MI_OK)
{
for (i=0; i<4; i++)
{
*(pSnr+i) = ucComMF522Buf[i];
snr_check ^= ucComMF522Buf[i];
}
if (snr_check != ucComMF522Buf[i])
{ status = MI_ERR; }
}
SetBitMask(CollReg,0x80);
return status;
}
/
//功 能:复位RC522
//返 回: 成功返回MI_OK
/
char PcdReset(void){
MF522_RST=1;
_nop_();//空机器指令
MF522_RST=0;
_nop_();
MF522_RST=1;
_nop_();
WriteRawRC(CommandReg,PCD_RESETPHASE); //往寄出去地址01,写0x0F
_nop_();
WriteRawRC(ModeReg,0x3D); //和Mifare卡通讯,CRC初始值0x6363,CRCPreset=01
WriteRawRC(TReloadRegL,30); //定时器重装值,分为两个8位寄存器,初始值都为0x00
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D); //内部定时器的设置1000 1101,后四位为TPrescalerReg的高四位
WriteRawRC(TPrescalerReg,0x3E); //为TPregScaler低8位,Ftimer = 6.78MHZ/TPreScaler
WriteRawRC(TxAutoReg,0x40);
return MI_OK;
}
//
//设置RC632的工作方式
//
char M500PcdConfigISOType(unsigned char type){
if (type == 'A') //ISO14443_A
{
ClearBitMask(Status2Reg,0x08);
WriteRawRC(ModeReg,0x3D);//3
WriteRawRC(RxSelReg,0x86);//
WriteRawRC(RFCfgReg,0x7F); //4F
WriteRawRC(TReloadRegL,30);//tmoLength);// TReloadVal = 'h6a =tmoLength(dec)
WriteRawRC(TReloadRegH,0);
WriteRawRC(TModeReg,0x8D);
WriteRawRC(TPrescalerReg,0x3E);
delay_10ms(1);
PcdAntennaOn();
}
else{ return -1; }
return MI_OK;
}
/
//功 能:读RC632寄存器
//参数说明:Address[IN]:寄存器地址
//返 回:读出的值
/
unsigned char ReadRawRC(unsigned char Address){
unsigned char i, ucAddr;
unsigned char ucResult=0;
MF522_SCK = 0;
MF522_NSS = 0;
ucAddr = ((Address<<1)&0x7E)|0x80;
for(i=8;i>0;i--)
{
MF522_SI = ((ucAddr&0x80)==0x80);
MF522_SCK = 1;
ucAddr <<= 1;
MF522_SCK = 0;
}
for(i=8;i>0;i--)
{
MF522_SCK = 1;
ucResult <<= 1;
ucResult|=(bit)MF522_SO;
MF522_SCK = 0;
}
MF522_NSS = 1;
MF522_SCK = 1;
return ucResult;
}
/
//功 能:写RC632寄存器
//参数说明:Address[IN]:寄存器地址
// value[IN]:写入的值
/
void WriteRawRC(unsigned char Address, unsigned char value){
unsigned char i, ucAddr;
MF522_SCK = 0;
MF522_NSS = 0;
ucAddr = ((Address<<1)&0x7E);
for(i=8;i>0;i--)
{
MF522_SI = ((ucAddr&0x80)==0x80);
MF522_SCK = 1;
ucAddr <<= 1;
MF522_SCK = 0;
}
for(i=8;i>0;i--)
{
MF522_SI = ((value&0x80)==0x80);
MF522_SCK = 1;
value <<= 1;
MF522_SCK = 0;
}
MF522_NSS = 1;
MF522_SCK = 1;
}
/
//功 能:置RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:置位值
/
void SetBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg,tmp | mask); // set bit mask
}
/
//功 能:清RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:清位值
/
void ClearBitMask(unsigned char reg,unsigned char mask)
{
char tmp = 0x0;
tmp = ReadRawRC(reg);
WriteRawRC(reg, tmp & ~mask); // clear bit mask
}
/
//功 能:通过RC522和ISO14443卡通讯
//参数说明:Command[IN]:RC522命令字
// pInData[IN]:通过RC522发送到卡片的数据
// InLenByte[IN]:发送数据的字节长度
// pOutData[OUT]:接收到的卡片返回数据
// *pOutLenBit[OUT]:返回数据的位长度
/
char PcdComMF522(unsigned char Command,
unsigned char *pInData,
unsigned char InLenByte,
unsigned char *pOutData,
unsigned int *pOutLenBit)
{
char status = MI_ERR;
unsigned char irqEn = 0x00;
unsigned char waitFor = 0x00;
unsigned char lastBits;
unsigned char n;
unsigned int i;
switch (Command)
{
case PCD_AUTHENT:
irqEn = 0x12;
waitFor = 0x10;
break;
case PCD_TRANSCEIVE:
irqEn = 0x77;
waitFor = 0x30;
break;
default:
break;
}
WriteRawRC(ComIEnReg,irqEn|0x80);
ClearBitMask(ComIrqReg,0x80);
WriteRawRC(CommandReg,PCD_IDLE);
SetBitMask(FIFOLevelReg,0x80);
for (i=0; i<InLenByte; i++)
{ WriteRawRC(FIFODataReg, pInData[i]); }
WriteRawRC(CommandReg, Command);
if (Command == PCD_TRANSCEIVE)
{ SetBitMask(BitFramingReg,0x80); }
// i = 600;//根据时钟频率调整,操作M1卡最大等待时间25ms
i = 2000;//900,1100,1700,2000,2700
do
{
n = ReadRawRC(ComIrqReg);
i--;
}
while ((i!=0) && !(n&0x01) && !(n&waitFor));
ClearBitMask(BitFramingReg,0x80);
if (i!=0)
{
if(!(ReadRawRC(ErrorReg)&0x1B))
{
status = MI_OK;
if (n & irqEn & 0x01)
{ status = MI_NOTAGERR; }
if (Command == PCD_TRANSCEIVE)
{
n = ReadRawRC(FIFOLevelReg);
lastBits = ReadRawRC(ControlReg) & 0x07;
if (lastBits)
{ *pOutLenBit = (n-1)*8 + lastBits; }
else
{ *pOutLenBit = n*8; }
if (n == 0)
{ n = 1; }
if (n > MAXRLEN)
{ n = MAXRLEN; }
for (i=0; i<n; i++)
{ pOutData[i] = ReadRawRC(FIFODataReg); }
}
}
else
{ status = MI_ERR; }
}
SetBitMask(ControlReg,0x80); // stop timer now
WriteRawRC(CommandReg,PCD_IDLE);
return status;
}
/
//开启天线
//每次启动或关闭天险发射之间应至少有1ms的间隔
/
void PcdAntennaOn(){
unsigned char i;
i = ReadRawRC(TxControlReg);
if (!(i & 0x03))
{
SetBitMask(TxControlReg, 0x03);
}
}
/
//关闭天线
/
void PcdAntennaOff()
{
ClearBitMask(TxControlReg, 0x03);
}
/
//功 能:扣款和充值
//参数说明: dd_mode[IN]:命令字
// 0xC0 = 扣款
// 0xC1 = 充值
// addr[IN]:钱包地址
// pValue[IN]:4字节增(减)值,低位在前
//返 回: 成功返回MI_OK
/
//char PcdValue(unsigned char dd_mode,unsigned char addr,unsigned char *pValue)
//{
// char status;
// unsigned int unLen;
// unsigned char i,ucComMF522Buf[MAXRLEN];
//
// ucComMF522Buf[0] = dd_mode;
// ucComMF522Buf[1] = addr;
// CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
//
// status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
//
// if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
// { status = MI_ERR; }
//
// if (status == MI_OK)
// {
// // memcpy(ucComMF522Buf, pValue, 4);
// for (i=0; i<16; i++)
// { ucComMF522Buf[i] = *(pValue+i); }
// CalulateCRC(ucComMF522Buf,4,&ucComMF522Buf[4]);
// unLen = 0;
// status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,6,ucComMF522Buf,&unLen);
// if (status != MI_ERR)
// { status = MI_OK; }
// }
//
// if (status == MI_OK)
// {
// ucComMF522Buf[0] = PICC_TRANSFER;
// ucComMF522Buf[1] = addr;
// CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
//
// status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
//
// if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
// { status = MI_ERR; }
// }
// return status;
//}
/*
/
//功 能:备份钱包
//参数说明: sourceaddr[IN]:源地址
// goaladdr[IN]:目标地址
//返 回: 成功返回MI_OK
/
char PcdBakValue(unsigned char sourceaddr, unsigned char goaladdr)
{
char status;
unsigned int unLen;
unsigned char ucComMF522Buf[MAXRLEN];
ucComMF522Buf[0] = PICC_RESTORE;
ucComMF522Buf[1] = sourceaddr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
if (status == MI_OK)
{
ucComMF522Buf[0] = 0;
ucComMF522Buf[1] = 0;
ucComMF522Buf[2] = 0;
ucComMF522Buf[3] = 0;
CalulateCRC(ucComMF522Buf,4,&ucComMF522Buf[4]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,6,ucComMF522Buf,&unLen);
if (status != MI_ERR)
{ status = MI_OK; }
}
if (status != MI_OK)
{ return MI_ERR; }
ucComMF522Buf[0] = PICC_TRANSFER;
ucComMF522Buf[1] = goaladdr;
CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);
status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);
if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A))
{ status = MI_ERR; }
return status;
}
*/
///
// Delay 10ms
///
void delay_10ms(unsigned int _10ms)
{
#ifndef NO_TIMER2
RCAP2LH = RCAP2_10ms;
T2LH = RCAP2_10ms;
TR2 = TRUE;
while (_10ms--)
{
while (!TF2);
TF2 = FALSE;
}
TR2 = FALSE;
#else
while (_10ms--)
{
delay_50us(19);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid )
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(20);
if (CmdValid)
return;
delay_50us(19);
if (CmdValid)
return;
}
#endif
}
/***************main.h***********/
#ifndef __DCMOTOR_H__
#define __DCMOTOR_H__
/*
**********************************************************************
* 头文件包含
**********************************************************************
*/
#include "common.h"
/*
**********************************************************************
* 端口定义
**********************************************************************
*/
// RC522 SPI接口定义
sbit MF522_NSS = P1^7; //这是SDA
sbit MF522_SCK = P1^6;
sbit MF522_SI = P1^5;
sbit MF522_SO = P1^4;
sbit MF522_RST = P1^3; //RC500片选
sbit V_motor = P0^0; //振动电机
sbit A0 = P0^7;//语音播报模块引脚A0~A2
sbit A1 = P0^6;
sbit A2 = P0^5;
//sbit gBuzzer = P2^3;//无源蜂鸣器
//sbit PWM = P2^1; //舵机
/*
**********************************************************************
* 本地宏定义
**********************************************************************
*/
#define OSC_FREQ (22118400L)
#define RCAP2_50us (65536L - OSC_FREQ/40417L)
#define RCAP2_1ms (65536L - OSC_FREQ/2000L)
#define RCAP2_10ms (65536L - OSC_FREQ/1200L)
#define TIME0_500us (65536L - OSC_FREQ/8000L)
#define TIME0_10ms (65536L - OSC_FREQ/200)
#define CALL_isr_UART() (TI = 1)
#define TRUE 1
#define FALSE 0
/*
**********************************************************************
* 外部函数原型声明
**********************************************************************
*/
void SysInit(void);
void V_motorOnce(unsigned int z);
//void delay1ms(unsigned int i);
void UartSendBytes(u8 *c);
void UartSendByte(u8 c);
//void delay10us(u8 i);
#endif
/******************** main.c文件**************/
/*********************************************************************
**********************************************************************
硬件接线:
sbit MF522_NSS = P1^7; //这是SDA
sbit MF522_SCK = P1^6;
sbit MF522_SI = P1^5;
sbit MF522_SO = P1^4;
sbit MF522_RST = P1^3; //RC500片选
sbit V_motor = P0^0; //振动电机 高电平
sbit A0 = P0^7;//语音播报模块引脚A0~A2 低电平
sbit A1 = P0^6;
sbit A2 = P0^5;
注意事项:(1) 板载晶振为11MHZ,波特率为2400、4800、7200均可找到误差不太
大的设置值,而有些波特率如9600则无法找到误差小的设置值,
因此不要设置9600这类波特率。
(2) 整个串口的代码和波特率计算,都可以由单片机小精灵工具自动
计算和生成,但是自己要理解计算过程,要能结合数据手册看懂
代码是怎么回事,不能只知其然不知其所以然
(3) 注意上位机串口助手的设置参考本文件夹中图“8.1.串口助手设置.png”
(4) 因为上位机中串口不能被2个程序同时打开,因此在stcisp软件下载
程序前必须将串口助手中串口关闭,否则一旦串口助手中打开串口
情况下进行下载,则stcisp软件会提示下载串口打开失败
版 本:2020.03.23
作 者:Naiva
时 间:2020/03/23
**********************************************************************/
/*
**********************************************************************
* 头文件包含
**********************************************************************
*/
#include <reg52.h>
#include<string.h>
#include "main.h"
#include "rc522.h"
/*
**********************************************************************
* 本地全局变量
**********************************************************************
*/
u16 count = 60, time=0;
u8 UID[5],Temp[4];
u8 UI[5]={0x27,0x7A,0xFB,0x34}; //E 此处为6张卡的信息
u8 UI1[5]={0xF1,0xB1,0x1B,0xD0}; //A
u8 UI2[5]={0x51,0x7E,0xC9,0xCF}; //B
u8 UI3[5]={0x31,0x11,0x1B,0xD0}; //C
u8 UI4[5]={0x8C,0xF3,0xDA,0x0B}; //D
u8 UI5[5]={0x89,0x31,0x17,0xBD}; //E 89 31 17 BD
void Rc522Test1(void);
void Rc522Test2(void);
void delay(unsigned int z)
{
unsigned int x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
/*********************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 参数列表 : 无
* 函数输出 : 无
*********************************************************************/
void init0()//
{
TMOD = 0x01; // 方式一
TH0 = 0X0FF;
TL0 = 0X9C;
TR0 = 1; // 开启定时器0
EA = 1; // 开启总中断
ET0 = 1; // 定时器0允许中断
}
//舵机
void T0_inter() interrupt 4
{
TR0 = 0;
TH0 = 0X0FF;
TL0 = 0X9C;
TR0 = 1;
// time ++ ;
// if (time < count)
// {
// PWM = 1;
// }
// else
// {
// PWM = 0;
// }
// if (time >= 200)
// {
// time = 0;
// }
}
void main(void)
{
init0(); //
SysInit(); //串口初始化
PcdReset(); //复位RC522
PcdAntennaOff(); //关天线
PcdAntennaOn(); //开天线
M500PcdConfigISOType('A');//设定工作模式
Rc522Test1(); //最终运行代码
// Rc522Test2(); //读取卡片数据,视情况test1和test2选一
}
/*********************************************************************
* 函 数 名 : V_motorOnce
* 函数功能 : 振动电机等于1 开始振动
* 参数列表 : z
* 函数输出 : z
*********************************************************************/
void V_motorOnce(unsigned int z)
{
unsigned int i;
for(i= z; i > 0; i--)
{ V_motor = 1;
delay(100);
V_motor = 0;
delay(100);
}
}
/*********************************************************************
* 函 数 名 : UartSendBytes
* 函数功能 : 通过串口往外发送数据
* 参数列表 : unsigned char *c,要发的数据
* 函数输出 : 无
*********************************************************************/
void UartSendByte(u8 c) //从串口发送1字节数据
{
u8 i = 0;
EA = 0;
SBUF = c;
while (!TI);
TI = 0;
EA = 1;
}
/*********************************************************************
* 函 数 名 : Rc522Test
* 函数功能 : test1为运行代码,test2用于读取卡片id
* 参数列表 : 无
* 函数输出 : 无
*********************************************************************/
//运行代码,正确的卡号
void Rc522Test1(void)
{
while(1)
{
if (PcdRequest(0x52, Temp) == MI_OK)
{
if (PcdAnticoll(UID) == MI_OK)
{
//此处为判断是否为代码内有标注的卡序列号,除非这五张卡,否则不执行判断
if(strcmp(UID,UI)==0||strcmp(UID,UI4)==0||strcmp(UID,UI1)==0||strcmp(UID,UI2)==0||strcmp(UID,UI5)==0)
{
A0 = 0;//
delay(5);
A0 = 1;
for(count; count > 0; count--)
{
delay(100);
if(count == 15)
{
A1 = 0;//
delay(5);
A1 = 1;
V_motorOnce(15);
}
}
}
else
{
//V_motor = 0;
P0 = 0xFe;
}
}
}
}
}
//读取卡数据
void Rc522Test2(void)
{
while(1)
{
if (PcdRequest(0x52, Temp) == MI_OK)
{
if (PcdAnticoll(UID) == MI_OK)
{
UartSendByte(UID[0]); //读取卡序列号前四位
UartSendByte(UID[1]);
UartSendByte(UID[2]);
UartSendByte(UID[3]);
delay(500);
delay(500);
}
}
}
}
/*********************************************************************
* 函 数 名 : SysInit
* 函数功能 : 串口初始化为2400波特率,寻卡,读写卡数据 // 单片机小精灵V1.3算出的2400波特率且波特率
* 参数列表 : 无
* 函数输出 : 无
*********************************************************************/
void SysInit(void)
{
/
P0 = 0xFe; //1111 1110 P0^0 为振动马达 高电平触发 P0^5~P0^7 为音频播报触发引脚 低电平触发
// gBuzzer = 0;
// V_motor = 0;
P1 = 0xFF;
P3 = 0xFF;
P2 = 0xFF;
TMOD=0x21; //设T0为方式1,GATE=1;
SCON=0x50;
//TH1=0xF4; //波特率为2400bps
//TL1=0xF4;
TH1=0xF4; //TH1 和 TL1 组合成timer1 16位定时器 晶振110592
TL1=0xF4;
TH0=0;
TL0=0;
TR0=1;
ET0=1; //允许T0中断
TR1=1;
//开启定时器
TI=1;
EA=1; //开启总中断
ES = 1;
RI = 1;
}
资料总汇下载地址(2020/07/15):https://download.csdn.net/download/Naiva/12262795
视频演示(2021.10.23):



















 1320
1320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











