






非线性悬架,UKF状态估计
软件使用:Matlab/Simulink
适用场景:采用模块化建模方法,搭建空气悬架模型,UKF状态估计模型,可实现悬架动挠度等状态估计。
包含:simulink源码文件,详细建模说明文档,对应参考资料
ID:75200650052227308
青青猪儿
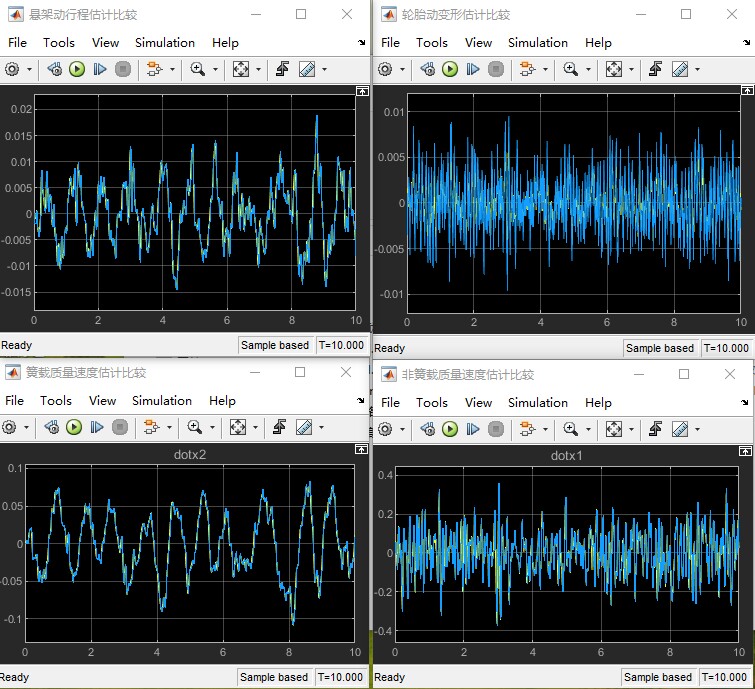
非线性悬架是现代车辆悬挂系统的重要组成部分,它通过控制车辆悬挂系统的运动,可以提高车辆的稳定性和乘坐舒适性。为了实现对非线性悬架系统的状态估计,本文采用了无迹卡尔曼滤波(UKF)方法,并结合Matlab Simulink软件进行建模和仿真。
在设计非线性悬架系统时,我们首先需要搭建空气悬架模型。空气悬架是一种基于气压调节的悬挂系统,它通过控制气压的变化,可以改变车辆的悬挂刚度和行驶高度。为了实现对空气悬架系统的建模,我们可以利用Matlab Simulink软件中提供的悬挂模块进行搭建。通过连接各个模块,并设置相应的参数和输入信号,我们可以建立一个包含空气悬架的车辆动力学模型。
在悬架系统的建模过程中,我们需要定义各个模块的输入输出关系,并设置相应的参数。例如,通过设置气压控制模块的输入信号和气压模型的参数,可以实现对空气悬架刚度和行驶高度的调节。此外,通过设置传感器模块的参数和信号采样频率,可以获取悬架系统的状态信息。
为了对非线性悬架系统的状态进行估计,我们采用了无迹卡尔曼滤波(UKF)方法。UKF方法是一种基于概率统计的滤波算法,它通过对状态变量进行高斯分布的采样,然后根据采样结果进行状态更新和滤波。相比传统的卡尔曼滤波方法,UKF方法能够更好地处理非线性系统和非高斯分布的状态变量。
在使用Matlab Simulink软件进行UKF状态估计模型的建立时,我们首先需要编写相应的Simulink源码文件。通过在Simulink模型中添加UKF滤波器模块,并设置相应的滤波器参数和初始状态,可以对悬架系统的状态进行估计。此外,我们还需要编写详细的建模说明文档,包括模型的结构图、输入输出关系、参数设置等内容。同时,为了方便其他用户的参考,我们还可以提供一些相关的参考资料,如相关论文、文献和技术手册等。
通过采用模块化建模方法,搭建空气悬架模型,并结合UKF状态估计模型,我们可以实现对非线性悬架系统的状态估计。这种方法不仅可以提高车辆悬挂系统的性能和稳定性,还可以为车辆动力学仿真和控制系统设计提供重要的参考和支持。同时,采用Matlab Simulink软件进行建模和仿真,可以提高模型的可视化效果和仿真的准确性,从而更好地满足实际工程应用的需求。
综上所述,本文通过使用Matlab Simulink软件,采用模块化建模方法搭建了空气悬架模型,并结合无迹卡尔曼滤波(UKF)方法进行状态估计。通过编写Simulink源码文件和详细建模说明文档,我们可以实现对非线性悬架系统的状态估计,并提供相应的参考资料。这种方法不仅可以提高车辆悬挂系统的性能和稳定性,还可以为车辆动力学仿真和控制系统设计提供重要的参考和支持。
以上相关代码,程序地址:http://matup.cn/650052227308.html















 247
247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









