






UKF模块
模块主要分成四个部分:
1、状态方程编写
2、初始化参数
3、UKF中特有参数设置
4、观测方程编写

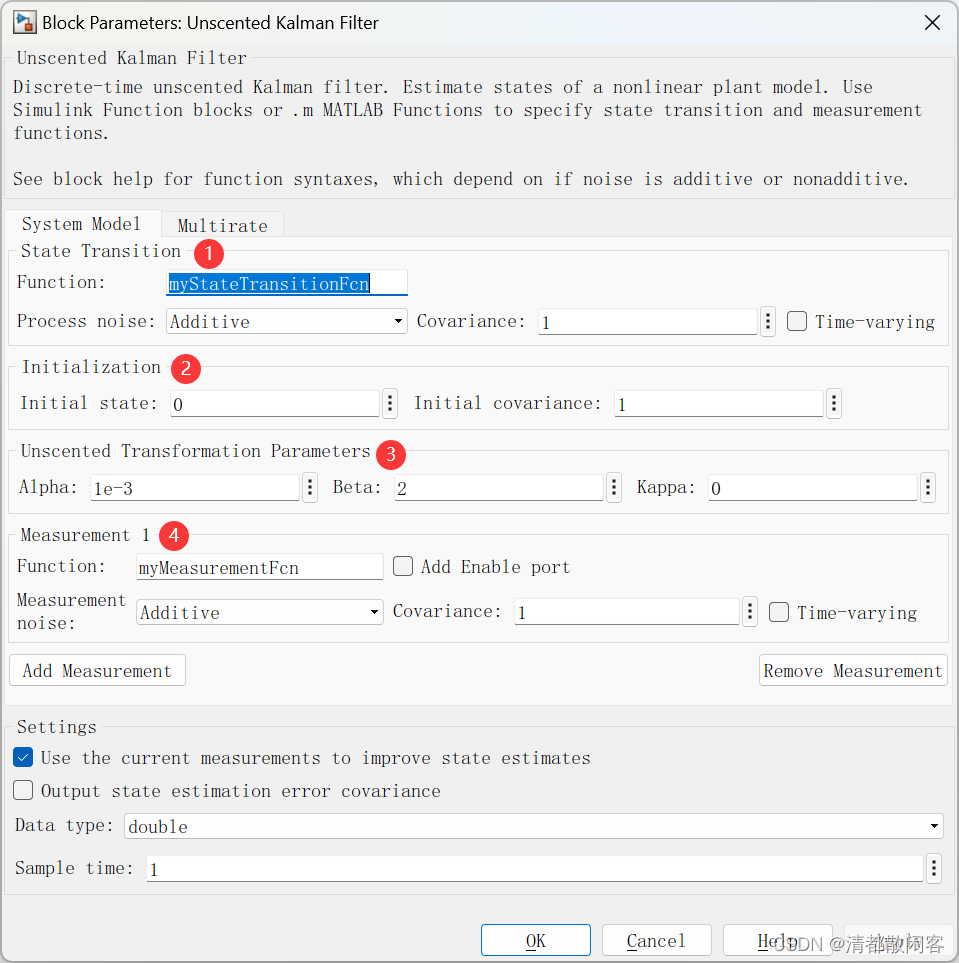
1、状态方程编写,自己编写函数
2、两个选项,功能是设定的状态方程是否需要外界的输入
3、状态方程的方差 即Q

1、设置状态方程的初始值,零时刻的初始值
2、状态协方差的初始值,即P

UKF特有参数,功能是我们选取sigma点的一个分布情况,一般来说可以默认
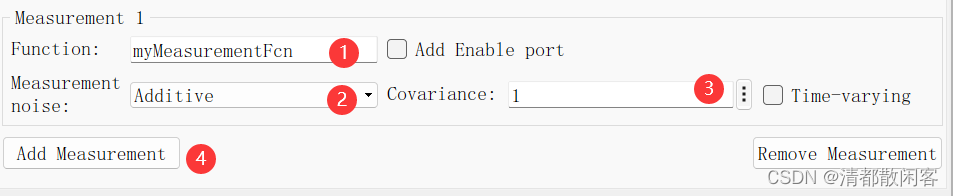
1、编写自己的观测方程
2、是否需要外接的输入
3、观测方程的方差,即R
4、如果有多个观测量的时候,可以点击增加

下面的设置 可以默认,数据类型就双精度,然后是采样时间。















 341
341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









