









序
🔥 毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是:基于51单片机多功能工业控制平台的设计
1控制部分介绍
1.1直流电机的控制部分
1.1.1 恒压恒流桥式2A驱动芯片L298N
L298N芯片脚图:
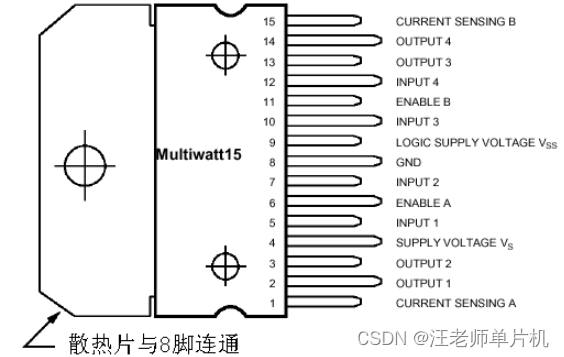
图1-1 L298N芯片脚图
L298是SGS(通标标准技术服务有限公司)公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部包含4通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。其引脚排列如上图中所示。
L298N的引脚9为LOGIC SUPPLY VOLTAGE Vss,即逻辑供应电压。引脚4为SUPPLYVOLTAGE Vs,即驱动部分输入电压。Vss电压要求输入最小电压为4.5V,最大可达36V;Vs电压最大值也是36V,但经过我的实验,Vs电压应该比Vss电压高,否则有时会出现失控现象。
它的引脚2,3,13,14为L298N芯片输入到电动机的输出端,其中引脚2和3能控制两相电机,对于直流电动机,即可控制一个电动机。同理,引脚13和14也可控制一个直流电动机。引脚6和11脚为电动机的使能接线脚。引脚5,7,10,12为单片机输入到L298N芯片的输入引脚。下表是其使能、输入引脚和输出引脚的逻辑关系如表1-1。
表1-1 输入引脚和输出引脚的逻辑关系
| EN A(B) | IN1(IN3) | IN2(IN4) | 电机运行情况 |
| H | H | L | 正转 |
| H | L | H | 反转 |
| H | 同IN2(IN4) | 同IN1(IN3) | 快速停止 |
| L | X | X | 停止 |
控制使能引脚ENA或者ENB就可以实现PWM脉宽速度调整。
1脚和15脚可单独引出连接电流采样电阻器,形成电流传感信号,也可以直接接地。在可设计中就将它们直接接地。
引脚8为芯片的接地引脚,它与L298N芯片的散热片连接在一起。由于本芯片的工作电流比较大,发热量也比较大,所以在本芯片的散热片上又连接了一块铝合金,以增大它的散热面积。
该芯片的一些参数如下:
1.逻辑部分输入电压:6~7V
2.驱动部分输入电压Vs:4.8~46V
3.逻辑部分工作电流Iss:≤36mA
4.驱动部分工作电流Io:≤2A
5.最大耗散功率:25W(T=75℃)
6.控制信号输入电平:高电平:2.3V≤Vin≤Vss,低电平:-0.3V≤Vin≤1.5V
7.工作温度:-25℃~+130℃
8.驱动形式:双路大功率H桥驱动
L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V电压。4脚VS接电源电压,VS电压范围VIH为+2.5V~46 V。输出电流可达2.5 A,可驱动电感性负载。1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。
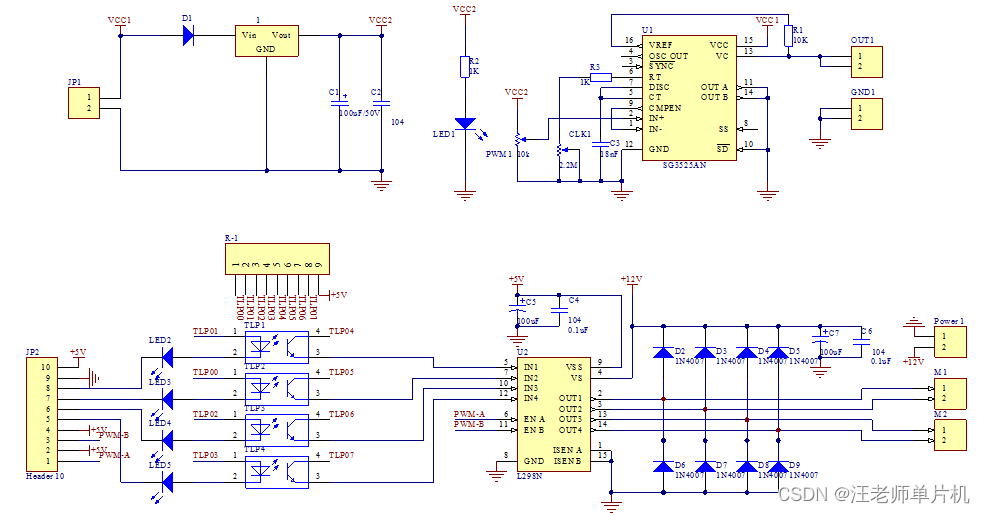
1.1.2 直流电机驱动电路原理
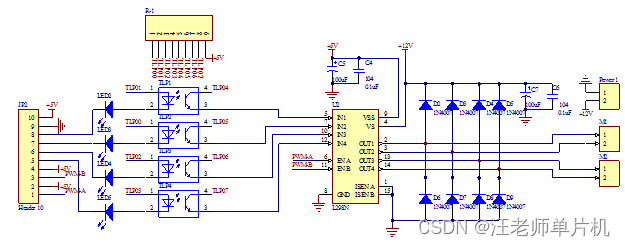
图1-2直流电机驱动电路原理图
由主控程序控制这几个脚就可以达到控制电机正反转的目的。
为了提高机器人的循线成功系数,我们采用了PWM进行机器人运转速度控制,当两个传感器感知到引导线条,点亮指示灯并准备做出改变机器人行进方向的响应时,靠程序的PWM控制降低电机的转速,实现平滑的转向过程。
PWM调速的基本原理和思想即使通过反复循环改变ON/OFF的时间分配。但机器人无法借助循环处理实现PWM,需要通过中断处理方式实现。设计靠的是89S51的两个定时器实现的,需要对定时器设定中断周期,也就是PWM的频率。请注意,PWM的频率即时达到数十千赫兹也能满足平滑控制的要求,当产生一个很大的弊端,就是中断次数过多,导致CPU大部分时间都在处理中断,实时检测和控制不能很快的响应和处理。而且电机也存在一个变化速率匹配的问题,所以不妨通过不断的尝试,适当地改变上述设定值以便得到最佳的效果。
1.1.3 直流电机的PWM调速电路
- PWM控制芯片SG3525功能简介
随着电能变换技术的发展,功率MOSFET在开关变换器中开始广泛使用,为此美国硅通用半导体公司(Silicon General)推出SG3525。SG3525是用于驱动N沟道功率MOSFET。其产品一推出就受到广泛好评。SG3525系列PWM控制器分军品、工业品、民品三个等级。下面我们对SG3525特点、引脚功能、电气参数、工作原理以及典型应用进行介绍。SG3525是电流控制型PWM控制器,所谓电流控制型脉宽调制器是按照接反馈电流来调节脉宽的。在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使
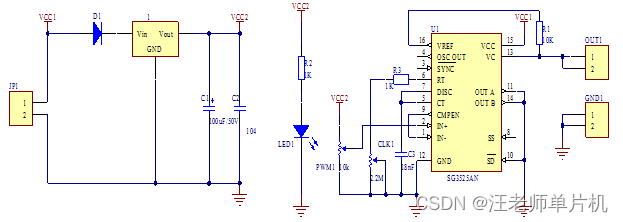
图1-3 PWM信号输出电路
输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环和电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器。SG3525引脚功能及特点简介其原理图如图下:
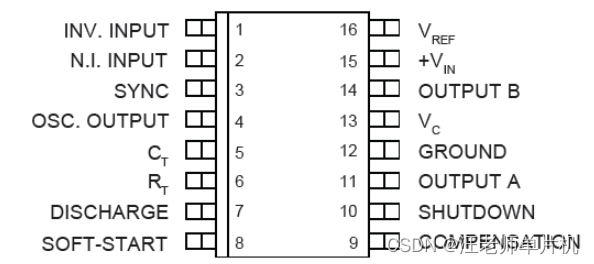
图1-4 PWM控制芯片SG3525
1.Inv.input(引脚1):误差放大器反向输入端。在闭环系统中,该引脚接反馈信号。在开环系统中,该端与补偿信号输入端(引脚9)相连,可构成跟随器。
2.Noninv.input(引脚2):误差放大器同向输入端。在闭环系统和开环系统中,该端接给定信号。根据需要,在该端与补偿信号输入端(引脚9)之间接入不同类型的反馈网络,可以构成比例、比例积分和积分等类型的调节器。
3.Sync(引脚3):振荡器外接同步信号输入端。该端接外部同步脉冲信号可实现与外电路同步。
4.OSC.Output(引脚4):振荡器输出端。
5.CT(引脚5):振荡器定时电容接入端。
6.RT(引脚6):振荡器定时电阻接入端。
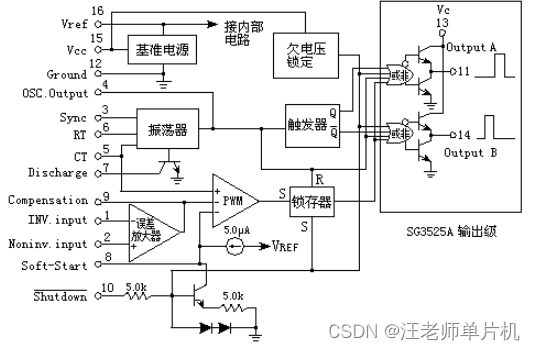
图1-5 SG3525内部结构图
7.Discharge(引脚7):振荡器放电端。该端与引脚5之间外接一只放电电阻,构成放电回路。
8.Soft-Start(引脚8):软启动电容接入端。该端通常接一只5 的软启动电容。
9.Compensation(引脚9):PWM比较器补偿信号输入端。在该端与引脚2之间接入不同类型的反馈网络,可以构成比例、比例积分和积分等类型调节器。
10.Shutdown(引脚10):外部关断信号输入端。该端接高电平时控制器输出被禁止。该端可与保护电路相连,以实现故障保护。
11.Output A(引脚11):输出端A。引脚11和引脚14是两路互补输出端。
12.Ground(引脚12):信号地。
13.Vc(引脚13):输出级偏置电压接入端。
14.Output B(引脚14):输出端B。引脚14和引脚11是两路互补输出端。
15.Vcc(引脚15):偏置电源接入端。
16.Vref(引脚16):基准电源输出端。该端可输出一温度稳定性极好的基准电压。
特点如下:
(1)工作电压范围宽:8V—35V。
(2)5.1(1 1.0%)V微调基准电源。
(3)振荡器工作频率范围宽:100Hz—400KHz。
(4)具有振荡器外部同步功能。
(5)死区时间可调。
(6)内置软启动电路。
(7)具有输入欠电压锁定功能。
(8)具有PWM琐存功能,禁止多脉冲。
(9)逐个脉冲关断。
(10)双路输出(灌电流/拉电流): mA(峰值)。
SG3525的工作原理
SG3525内置了5.1V精密基准电源,微调至 1.0%,在误差放大器共模输入电压范围内,无须外接分压电组。SG3525还增加了同步功能,可以工作在主从模式,也可以与外部系统时钟信号同步,为设计提供了极大的灵活性。在CT引脚和Discharge引脚之间加入一个电阻就可以实现对死区时间的调节功能。由于SG3525内部集成了软启动电路,因此只需要一个外接定时电容。SG3525的软启动接入端(引脚8)上通常接一个5 的软启动电容。上电过程中,由于电容两端的电压不能突变,因此与软启动电容接入端相连的PWM比较器反向输入端处于低电平,PWM比较器输出高电平。此时,PWM琐存器的输出也为高电平,该高电平通过两个或非门加到输出晶体管上,使之无法导通。只有软启动电容充电至其上的电压使引脚8处于高电平时,SG3525才开始工作。由于实际中,基准电压通常是接在误差放大器的同相输入端上,而输出电压的采样电压则加在误差放大器的反相输入端上。当输出电压因输入电压的升高或负载的变化而升高时,误差放大器的输出将减小,这将导致PWM比较器输出为正的时间变长,PWM琐存器输出高电平的时间也变长,因此输出晶体管的导通时间将最终变短,从而使输出电压回落到额定值,实现了稳态。反之亦然。外接关断信号对输出级和软启动电路都起作用。当Shutdown(引脚10)上的信号为高电平时,PWM琐存器将立即动作,禁止SG3525的输出,同时,软启动电容将开始放电。如果该高电平持续,软启动电容将充分放电,直到关断信号结束,才重新进入软启动过程。注意,Shutdown引脚不能悬空,应通过接地电阻可靠接地,以防止外部干扰信号耦合而影SG3525的正常工作。欠电压锁定功能同样作用于输出级和软启动电路。如果输入电压过低,在SG3525的输出被关断同时,软启动电容将开始放电。此外,SG3525还具有以下功能,即无论因为什么原因造成PWM脉冲中止,输出都将被中止,直到下一个时钟信号到来,PWM琐存器才被复位。
1.1.4 控制直流电机程序设计流程
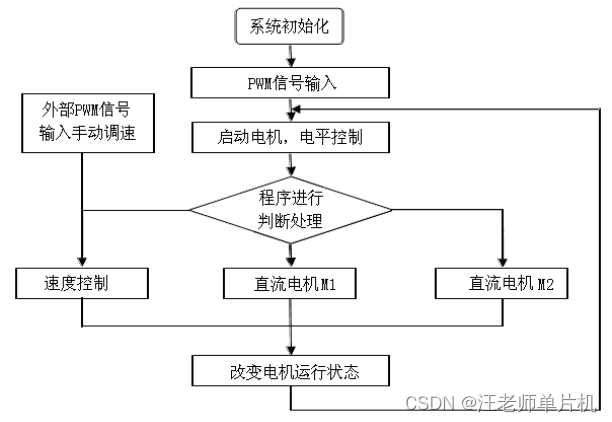
图1-5控制直流电机程序设计流程
1.2步进电机的控制部分
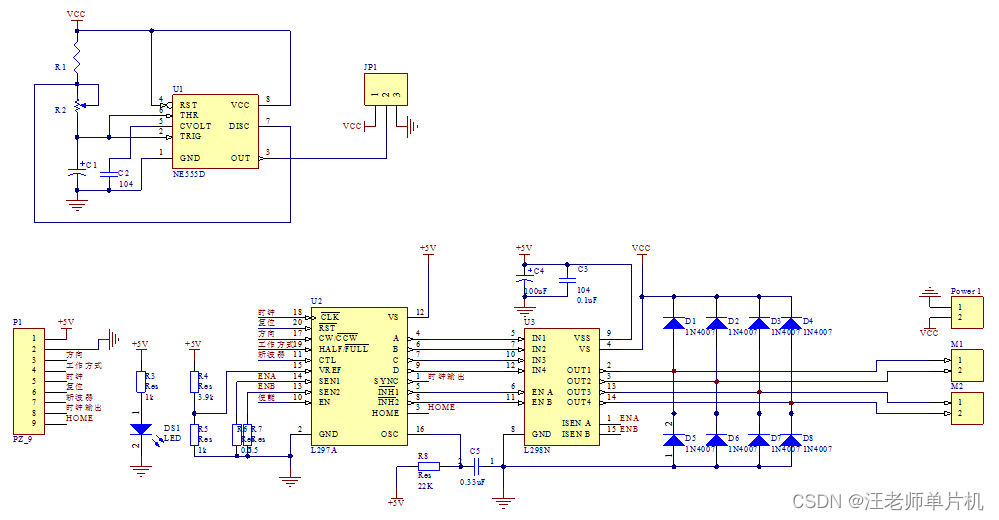
1.2.1 进电机的驱动电路原理
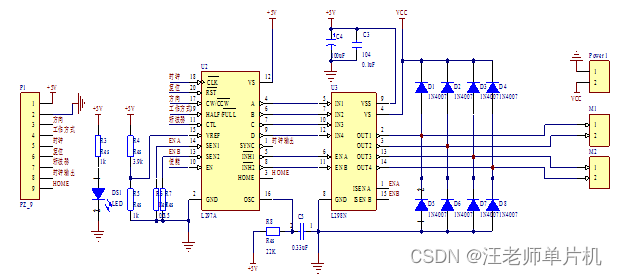
图1-6 步进电机驱动电路原理
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
1.步进电机最大特点是:
(1)它是通过输入脉冲信号来进行控制的。
(2)电机的总转动角度由输入脉冲数决定。
(3)电机的转速由脉冲信号频率决定。
2.步进电机的驱动电路
根据控制信号工作,控制信号由单片机产生。(或者其他信号源)
3.基本原理作用如下表:
表1-2两相四拍工作模式时序表
| 步进电机 | 信号输入 | 第一步 | 第二步 | 第三步 | 第四步 | 返回第一步 |
| 正转 | IN1 | 0 | 1 | 1 | 1 | 返回 |
| IN2 | 1 | 0 | 1 | 1 | 返回 | |
| IN3 | 1 | 1 | 0 | 1 | 返回 | |
| IN4 | 1 | 1 | 1 | 0 | 返回 | |
| 反转 | IN1 | 1 | 1 | 1 | 0 | 返回 |
| IN2 | 1 | 1 | 0 | 1 | 返回 | |
| IN3 | 1 | 0 | 1 | 1 | 返回 | |
| IN4 | 0 | 1 | 1 | 1 | 返回 |
4.控制换相顺序
(1)通电换相这一过程称为脉冲分配。
例如:
(2)两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A’-B’)依次循环。 (通电控制脉冲必须严格按照这一顺序分别控制A,B相的通断。)
5.两相四线步进电机的四拍工作方式,其各相通电顺序为:
(A-AB-B-BA’-A’-A’B’-B’-B’A)依次循环。(出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用八拍工作方式)
(1)控制步进电机的转向
如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。如:正转通电顺序是:(A-B-A’-B’ 依次循环。)则反转的通电顺序是:(B‘-A’-B-A依次循环。)
(2)控制步进电机的速度
如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机发出的脉冲频率,就可以对步进电机进行调速。(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
1.2.2 NE555脉冲产生器电路
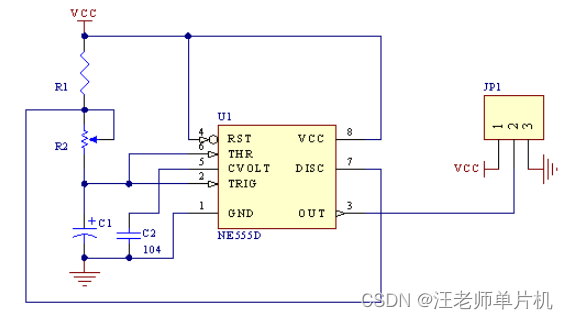
图1-7 NE555脉冲产生器电路
1.3继电器控制部分
1.3.1 继电器控制部分电路原理
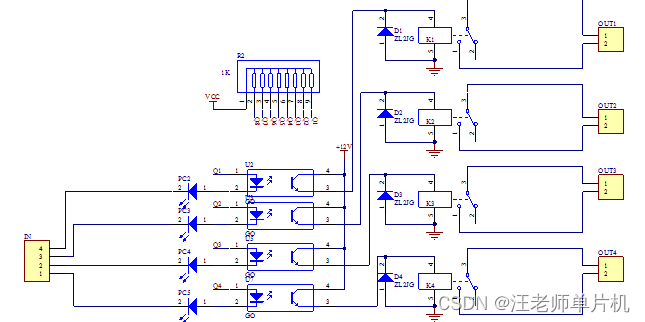
图1-11继电器控制部分电路原理图
电路原理
此电路是四路继电器控制原理图,继电器由光耦直接驱动,继电器可控制直流24V交流110V电流10你内的负载。当单片机输出低电平信号时,光耦及发光二极管正向导通,发光二极管亮,做信号输出指示,光耦3、4两管脚,导通,驱动继电器线圈吸合,带动继电器触点,常开点闭合,常闭点断开。图中整流二极管的作用是需流保护,主要是保护继电器线圈。反正,当单片机输出高电平信号是光耦及其发光二极管截止,光耦3、4管脚截止,从而继电器线圈不得电,而保持常态。
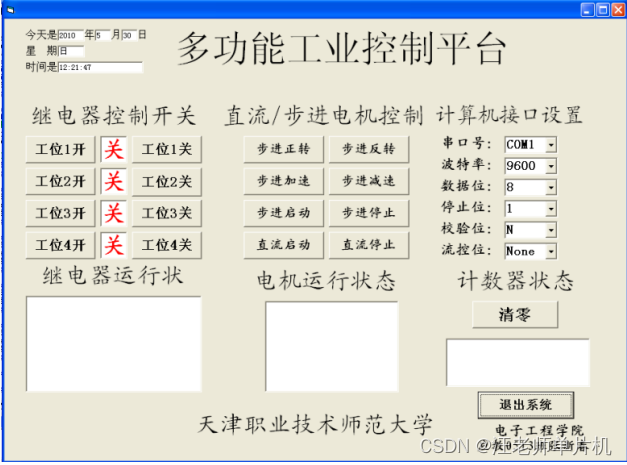
图1-12上位机面板控制界面
2调试及结果
2.1调试过程
对于本设计的调试分为三部分,硬件调试,软件调试,软硬连调。
硬件调试:主要是设计电路原理图,根据原理图焊接电路、调试并记录参数,焊接电源电路,使其输出稳定平滑的12V、5V、3.3V直流电。直流电机驱动电路设计实现对直流电机的PWM调速,以及正反转,工作电流最大1.5A。PWM信号可由单片机产生,也可用外部,PWM信号模块产生、步进电机驱动电路有L297和L298N两个芯片组合驱动步进电机,以实现正反转加减速,工作模式等功能,速度也可由外部NE555脉冲电路产生的可调脉冲信号控制。继电器采用光电隔离,有光耦直接驱动继电器,并做相应的需流保护。
软件调试:程序可以运用C语言进行编写,在这次设计中我用了IAR Embedded Workbench软件进行C语言的编写和调试。IAR Embedded Workbench是很好的单片机C语言的调试工具,编译过程中的信息将出现在输出窗口中的Build页中,如果源程序中有语法错误,会有错误报告出现,双击该行,可以定位到出错的位置,对源程序修改之后再次编译,直到没有错误和警告出现。该软件还支持在线仿真,点击菜单栏中的Debug项,再打开相应的数据寄存器点击运行就可以观测数据的变化情况了,十分的方便。
软硬连调:硬件调试,软件调试虽然都完成了,但是这并不意味着整个系统就能按我们的要求运行了,还必须进行软硬连调。把硬件连接好以后,利用软件的仿真功能实时调试,我们可以通过实验板上的现象来初步判断程序存在的问题。举个例子,刚开始的时候,我们观测到单片机实验板上显示的数据闪烁得太快,我们就估计是延时程序的延时的值设置地不恰当,修改中果然效果好得多了。
上位机程序调试可由两台电脑串口互连,通过串口调试助手调试。
2.2结果
程序设计完成后,运用自制的Debug下载线将程序下载到MSP430F149单片机中。采用+12V电源供电测试得到如下结果:
1.电源模块输出稳定平滑的12V、5V、3.3V直流电。
2.硬件电路能正常接受数据并按照程序要求执行。
3.PC机软件部分运行稳定并能够正常的通过电脑的串行数据接口发送数据。
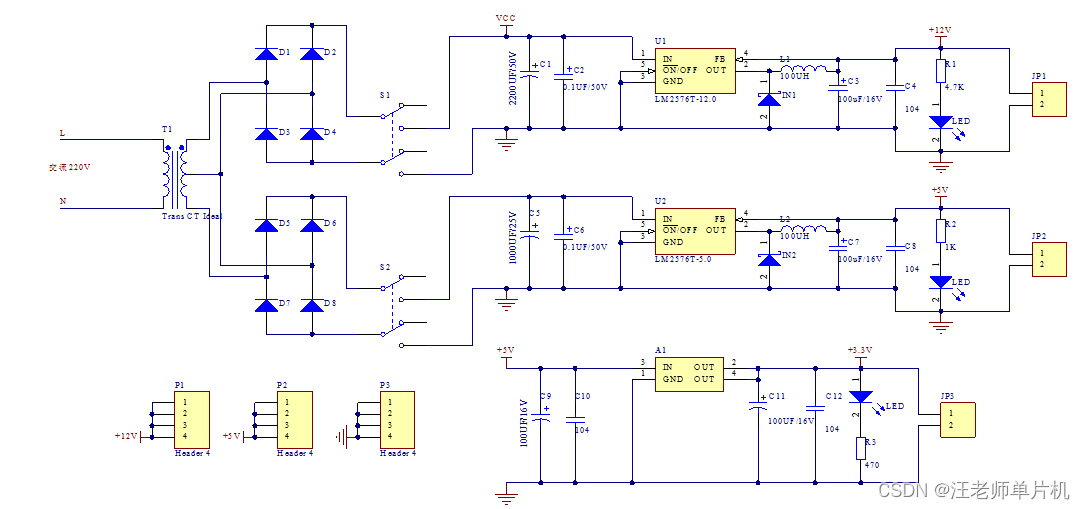
电源模块原理图
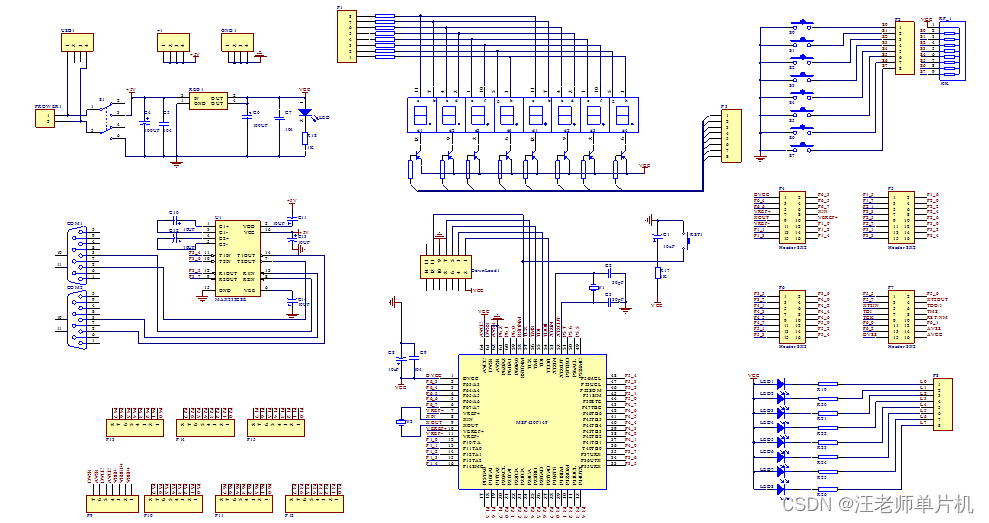
单片机模块原理图
直流驱动模块原理图
步进电机驱动模块原理图
如果学弟学妹们在毕设方面有任何问题,随时可以私信我咨询哦,有问必答!学长专注于单片机相关的知识,可以解决单片机设计、嵌入式系统、编程和硬件等方面的难题。
愿毕业生有力,陪迷茫着前行!


















 2067
2067

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









