






完美注释,动态窗口法,Dynamic window approach,DWA路径规划算法,适用于移动机器人,无人船,无人机,无人驾驶汽车,MATLAB编写,全文有注释,可以自行修改地图信息和坐标位置。
ID:189730750595869
石榴红的中棉as
完美注释是软件开发中非常重要的一个环节,它可以提高代码的可读性和可维护性。在移动机器人、无人船、无人机和无人驾驶汽车等领域,路径规划是一项关键的技术。本文将介绍一种被广泛应用于这些领域的路径规划算法——动态窗口法(Dynamic Window Approach,DWA),并演示如何使用MATLAB进行实现。
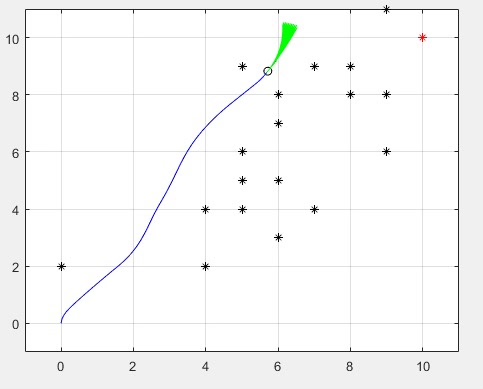
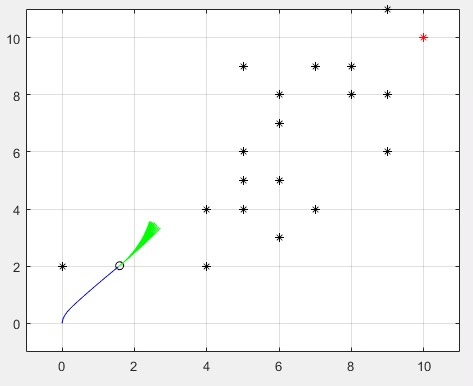
首先,我们来了解一下动态窗口法的原理。动态窗口法是一种基于局部规划的路径规划算法,它通过在一个动态窗口内搜索最优的速度指令来决定机器人下一步的移动方向和速度。这个窗口由机器人的最大速度和加速度等参数来定义,而动态窗口法则根据机器人当前的状态(如位置、速度、障碍物等)和目标点来动态调整窗口的大小和位置。
在实现动态窗口法时,我们可以使用MATLAB编写程序。首先,我们需要定义机器人的运动模型和环境模型。运动模型描述了机器人如何根据速度指令进行运动,而环境模型则定义了机器人周围的障碍物信息。这些模型可以根据实际情况进行调整和修改。
接下来,我们开始编写路径规划算法的核心部分。动态窗口法的主要思想是在动态窗口内搜索所有可能的速度指令,并评估它们的代价函数。代价函数一般由多个指标(如到目标点距离、与障碍物的距离、速度指令的平滑度等)综合计算而成,其中权重可以根据需求进行调整。
为了减小计算复杂度,我们可以使用启发式搜索来进一步优化路径规划的效率。一种常用的启发式搜索方法是采用采样+验证的策略,即在动态窗口内随机采样一定数量的速度指令,并对其进行验证和评估。验证过程可以通过模拟机器人的运动来进行,我们可以使用MATLAB提供的仿真工具来实现。
在实际应用中,我们可能需要根据不同的情况进行参数调优和算法改进。例如,对于不同类型的机器人(如无人船、无人机、无人驾驶汽车等),我们可能需要调整动态窗口的大小和形状,以适应不同的运动特性和环境约束。此外,我们还可以结合其他路径规划算法(如A*算法、RRT算法等)进行改进,以提高路径规划的效率和质量。
总之,动态窗口法是一种应用广泛的路径规划算法,它在移动机器人、无人船、无人机和无人驾驶汽车等领域发挥着重要作用。通过MATLAB的编程和仿真工具,我们可以方便地实现和验证该算法。希望通过本文的介绍,读者可以对动态窗口法有一个更深入的理解,并根据实际需求进行进一步的研究和应用。
(注:本文所述方法仅供参考,具体实现细节和效果可能因实际情况有所差异。请读者根据自己的需求和实际情况进行调整和改进。)
【相关代码,程序地址】:http://fansik.cn/730750595869.html
















 1102
1102











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









