






 本文探讨了基于模糊逻辑的并联混合动力车辆控制策略,考虑了WLTC和NEDC工况。通过仿真展示了发动机、电机等组件性能及能效,利用Simulink模型优化控制策略,结果显示效果良好,为环保交通发展贡献力量。
本文探讨了基于模糊逻辑的并联混合动力车辆控制策略,考虑了WLTC和NEDC工况。通过仿真展示了发动机、电机等组件性能及能效,利用Simulink模型优化控制策略,结果显示效果良好,为环保交通发展贡献力量。
基于模糊逻辑的并联式混合动力车辆控制策略
①(工况可自行添加)已有WLTC、NEDC工况;
②仿真图像包括 发动机转矩变化图像、电机转矩变化图像、档位变化图像、电池SOC变化图像、等效百公里燃油消耗量图像、速度跟随图像、车速变化图像;
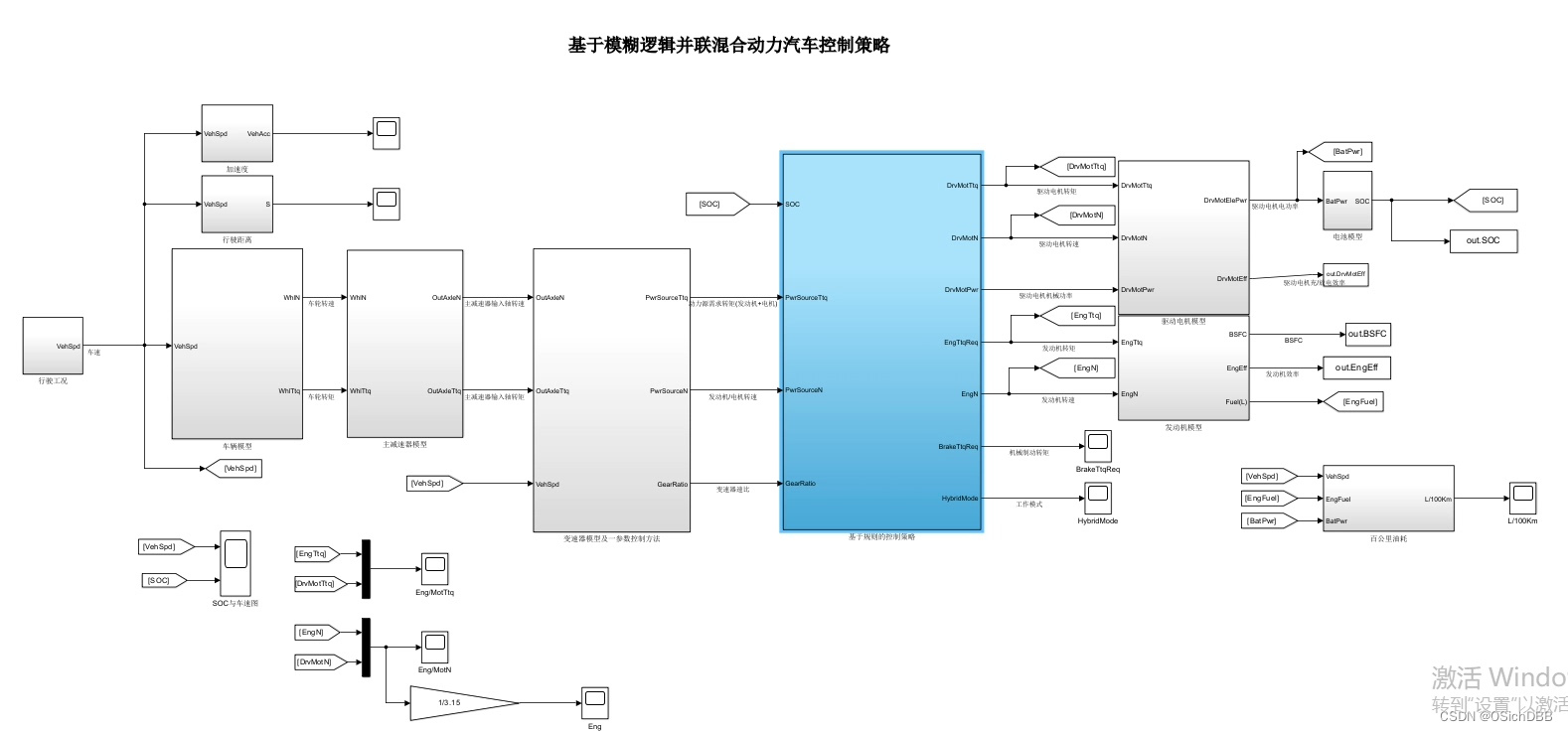
③整车similink模型中包含工况输入模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型、档位切换模型纵向动力学模型.
仿真效果良好
基于模糊逻辑的并联式混合动力车辆控制策略
随着环境保护和能源危机问题的日益突出,混合动力车辆作为一种高效、环保的交通工具受到了广泛的关注和研究。而在混合动力车辆中,控制策略的优化对于提高其性能和效能至关重要。本文将基于模糊逻辑的方法,探讨并联式混合动力车辆的控制策略。
首先,我们需要明确的是,在本研究中考虑了WLTC(Worldwide Harmonized Light Vehicles Test Cycle,全球统一轻型车辆排放试验循环)和NEDC(New European Driving Cycle,新欧洲行驶循环)两种工况。这两个工况是混合动力车辆控制策略研究中的重要基准,通过模拟这些工况可以更全面地评估并联式混合动力车辆的性能和能效。
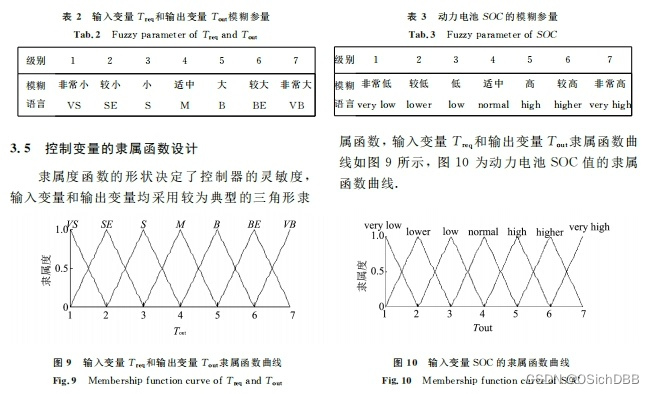
其次,为了更好地理解模糊逻辑在混合动力车辆控制中的应用,我们引入了一系列仿真图像,包括发动机转矩变化图像、电机转矩变化图像、档位变化图像、电池SOC(State of Charge,电池充电状态)变化图像、等效百公里燃油消耗量图像、速度跟随图像和车速变化图像。这些仿真图像展示了控制策略的优化过程和效果,为后续的控制策略分析提供了必要的参考。
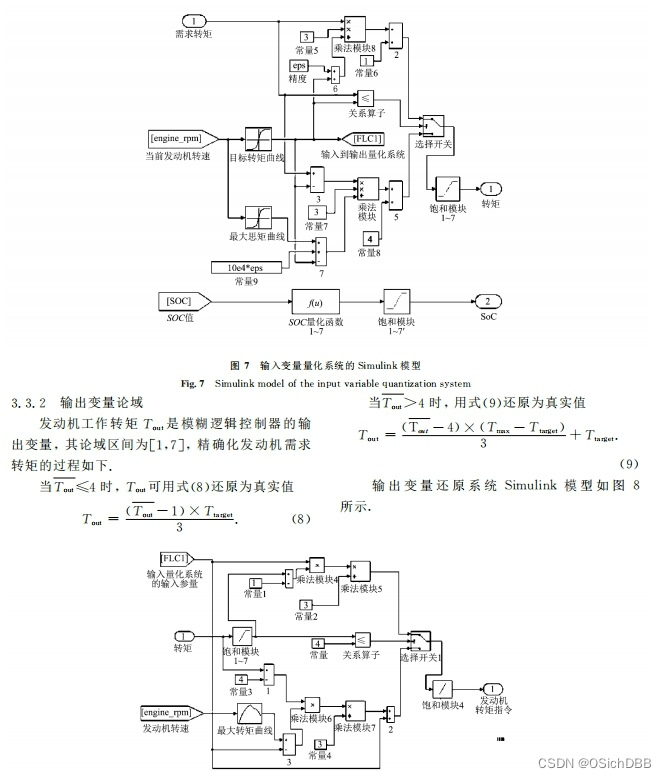
在整车Simulink模型中,我们包含了多个模块,如工况输入模型、发动机模型、电机模型、制动能量回收模型、转矩分配模型和档位切换模型以及纵向动力学模型。这些模块共同作用,实现了并联式混合动力车辆的控制和性能优化。通过模拟仿真,我们可以评估不同控制策略在不同工况下的表现,并进一步优化控制策略,以达到更好的能效和性能。
本研究的仿真效果良好,验证了基于模糊逻辑的并联式混合动力车辆控制策略的可行性和有效性。同时,本文是本人原创,为了保护作者的知识产权,技术资料一经售出概不退货。这一措施旨在促进技术交流和合作,并保护研究者的权益。
综上所述,基于模糊逻辑的并联式混合动力车辆控制策略在提高混合动力车辆性能和能效方面具有重要的研究价值。通过仿真分析和模型优化,我们可以不断改进控制策略,提高混合动力车辆的整体性能。期待该研究能够为混合动力车辆的发展和应用做出贡献,推动环境友好型交通的实现。
相关代码,程序地址:http://imgcs.cn/lanzoun/728481564395.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









