







撰文|李响
1、前言
为了简化分布式训练,OneFlow 提出了全局视角(Global View) 的概念,在全局视角下,可以像单机单卡编程,进行分布式训练。在 OneFlow 的设计中,使用 Placement、SBP 和 SBP Signature 来实现这种抽象。其中,Global Tensor 是为了能够满足 Global View 所需抽象的一种 Tensor。本文重点讨论了 Global Tensor 的全局视角与物理视角的映射。
此外,从去年11月中旬开始,我在 OneFlow 五个月的实习告一段落,在文末,我对这段时间的工作和收获做了简单总结。
2、Global Tensor
2.1 OneFlow 分布式全局视角的基础保证
这部分内容对应 OneFlow 论文(https://arxiv.org/pdf/2110.15032.pdf) 的 3.1 节,Placement 与 SBP、SBP Signature 是 OneFlow 分布式全局视角的重要保证,OneFlow 的全局视角使分布式训练与单机单卡一样易用。
首先,Global Tensor 的 Placement 属性可以指定该 Tensor 存放在哪个物理设备上。我们重点看下 SBP 的设计,它完成了全局张量和相应的局部张量之间映射的数学抽象。
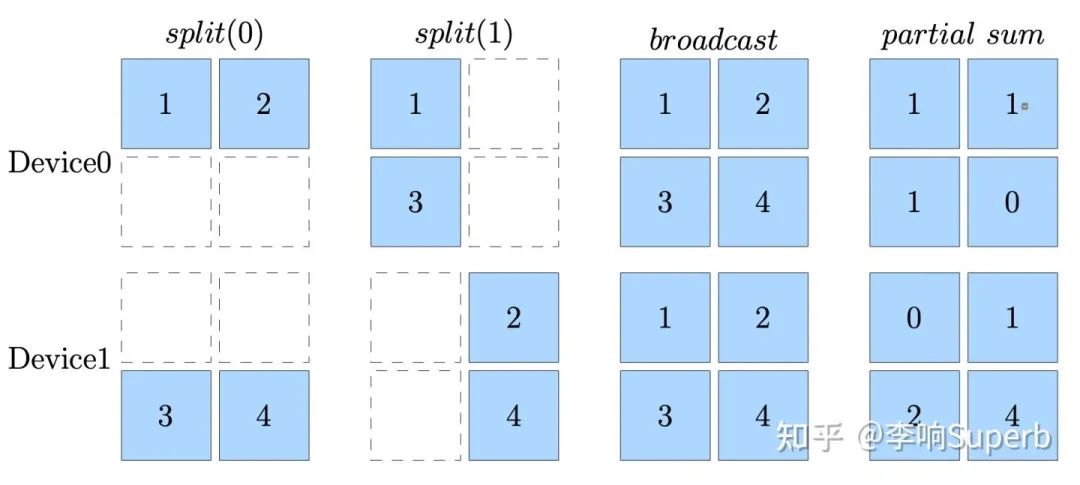
下图是一个形状为 2x2 的 Global Tensor 在 4 种 SBP 映射(每一种都被称为 SBP Signature)下被映射为 2 个局部张量(Local Tensor),分别为 split(0),split(1),broadcast 和 partial-sum,分别是按维度分割、复制并广播和按位置相加的思路。
对于一个 Global Tensor,我们可以任意设置它的 SBP。但是,对于有输入、输出数据的 Ops,不允许随意设置它的输入、输出的 SBP 属性。因为随意设置 Ops 的输入输出 SBP 属性,可能不符合全局视角下算子的运算法则,所以 SBP Signature 的概念被提出。
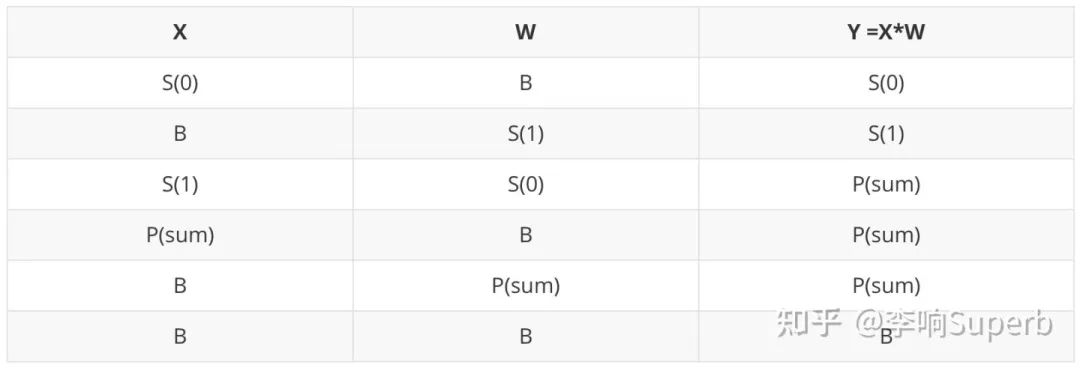
以 MatMul 为例,给定一个数据张量 X 和一个权重张量 W,Y=X*W 的 SBP Signature 可以从 X 和 W 的 Signature 中推断出来。如下表,是合法的合法 SBP 组合。当然,SBP Signature 是不需要被我们显式指定的,OneFlow 存在自动推导机制。
以上介绍的是 1D SBP,为了兼容更复杂的分布式训练场景,OneFlow 也提供了 2D SBP。我们简单来看下区别,首先是 Placement 配置的区别:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 714
714











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









