







Video for Linuxtwo(Video4Linux2)简称V4L2,是V4L的改进版。V4L2是linux操作系统下用于采集图片、视频和音频数据的API接口,配合适当的视频采集设备和相应的驱动程序,可以实现图片、视频、音频等的采集。在远程会议、可视电话、视频监控系统和嵌入式多媒体终端中都有广泛的应用。
在Linux下,所有外设都被看成一种特殊的文件,成为“设备文件”,可以象访问普通文件一样对其进行读写。一般来说,采用V4L2驱动的摄像头设备文件是/dev/video0。V4L2支持两种方式来采集图像:内存映射方式(mmap)和直接读取方式(read)。V4L2在include/linux/videodev.h文件中定义了一些重要的数据结构,在采集图像的过程中,就是通过对这些数据的操作来获得最终的图像数据。Linux系统V4L2的能力可在Linux内核编译阶段配置,默认情况下都有此开发接口。
应用程序通过V4L2进行视频采集的原理
在应用程序获取视频数据的流程中,都是通过 ioctl 命令与驱动程序进行交互,常见的 ioctl 命令有:
VIDIOC_QUERYCAP /* 获取设备支持的操作 */
VIDIOC_G_FMT /* 获取设置支持的视频格式 */
VIDIOC_S_FMT /* 设置捕获视频的格式 */
VIDIOC_REQBUFS /* 向驱动提出申请内存的请求 */
VIDIOC_QUERYBUF /* 向驱动查询申请到的内存 */
VIDIOC_QBUF /* 将空闲的内存加入可捕获视频的队列 */
VIDIOC_DQBUF /* 将已经捕获好视频的内存拉出已捕获视频的队列 */
VIDIOC_STREAMON /* 打开视频流 */
VIDIOC_STREAMOFF /* 关闭视频流 */
VIDIOC_QUERYCTRL /* 查询驱动是否支持该命令 */
VIDIOC_G_CTRL /* 获取当前命令值 */
VIDIOC_S_CTRL /* 设置新的命令值 */
VIDIOC_G_TUNER /* 获取调谐器信息 */
VIDIOC_S_TUNER /* 设置调谐器信息 */
VIDIOC_G_FREQUENCY /* 获取调谐器频率 */
VIDIOC_S_FREQUENCY /* 设置调谐器频率 */
// 函数原型
int ioctl(intfd, int request, struct v4l2_capability *argp);
V4L2支持内存映射方式(mmap)和直接读取方式(read)来采集数据,前者一般用于连续视频数据的采集,后者常用于静态图片数据的采集,本文重点讨论内存映射方式的视频采集。
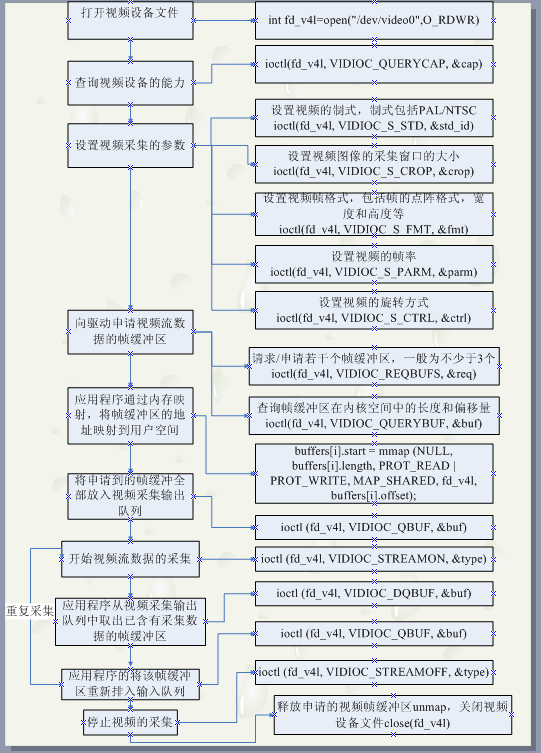
应用程序通过V4L2接口采集视频数据分为五个步骤:
首先,打开视频设备文件,进行视频采集的参数初始化,通过V4L2接口设置视频图像的采集窗口、采集的点阵大小和格式;
其次,申请若干视频采集的帧缓冲区,并将这些帧缓冲区从内核空间映射到用户空间,便于应用程序读取/处理视频数据;
第三,将申请到的帧缓冲区在视频采集输入队列排队,并启动视频采集;
第四,驱动开始视频数据的采集,应用程序从视频采集输出队列取出帧缓冲区,处理完后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视频数据;
第五,停止视频采集。
具体的程序实现流程可以参考下面的流程图:
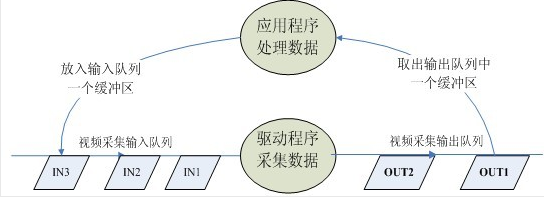
其实其他的都比较简单,就是通过ioctl这个接口去设置一些参数。最主要的就是buf管理。他有一个或者多个输入队列和输出队列。
启动视频采集后,驱动程序开始采集一帧数据,把采集的数据放入视频采集输入队列的第一个帧缓冲区,一帧数据采集完成,也就是第一个帧缓冲区存满一帧数据后,驱动程序将该帧缓冲区移至视频采集输出队列,等待应用程序从输出队列取出。驱动程序接下来采集下一帧数据,放入第二个帧缓冲区,同样帧缓冲区存满下一帧数据后,被放入视频采集输出队列。
应用程序从视频采集输出队列中取出含有视频数据的帧缓冲区,处理帧缓冲区中的视频数据,如存储或压缩。
最后,应用程序将处理完数据的帧缓冲区重新放入视频采集输入队列,这样可以循环采集,如图所示。
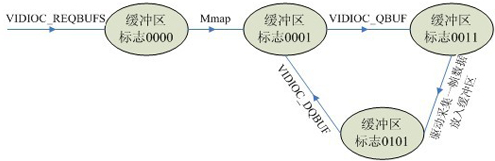
每一个帧缓冲区都有一个对应的状态标志变量,其中每一个比特代表一个状态
V4L2_BUF_FLAG_UNMAPPED 0B0000
V4L2_BUF_FLAG_MAPPED 0B0001
V4L2_BUF_FLAG_ENQUEUED 0B0010
V4L2_BUF_FLAG_DONE 0B0100
缓冲区的状态转化如图所示。
下面的程序注释的很好,就拿来参考下:
V4L2 编程
1. 定义
V4L2(Video ForLinux Two) 是内核提供给应用程序访问音、视频驱动的统一接口。
注意:V4L2 的相关定义包含在头文件<linux/videodev2.h>中。
2. 工作流程
打开设备-> 检查和设置设备属性->设置帧格式-> 设置一种输入输出方法(缓冲区管理)-> 循环获取数据-> 关闭设备
2.1 打开设备
int fd=open(“/dev/video0”,O_RDWR);// 打开设备2.2 查询设备属 VIDIOC_QUERYCAP
使用ioctl VIDIOC_QUERYCAP 来查询当前driver是否合乎规范。因为V4L2要求所有driver 和Device都支持这个Ioctl。 所以,可以通过这个ioctl是否成功来判断当前设备和dirver 是否支持V4L2规范。当然,这样同时还能够得到设备足够的信息。
// 相关结构体
structv4l2_capability
{
__u8 driver[16]; // 驱动名字
__u8 card[32]; // 设备名字
__u8bus_info[32]; // 设备在系统中的位置
__u32 version; // 驱动版本号
__u32capabilities; // 设备支持的操作
__u32reserved[4]; // 保留字段
};
V4L2_CAP_VIDEO_CAPTURE // 是否支持图像获取
// 示例
structv4l2_capability cap;
ioctl(fd,VIDIOC_QUERYCAP,&cap);
2.3 帧格式
2.3.1 显示所有支持的帧格式 VIDIOC_ENUM_FMT
使用ioctl VIDIOC_ENUM_FMT 依次询问,type为:V4L2_BUF_TYPE_VIDEO_CAPTURE。 index从0开始,依次增加,直到返回 -1 (如果index有效,则返回0). Driver会填充结构体struct v4l2_fmtdesc的其它内容,如果index超出范围,则返回-1。
// 相关结构体
struct v4l2_fmtdesc
{
__u32 index; // 需要填充,从0开始,依次上升。
enum v4l2_buf_type type; //Camera,则填写V4L2_BUF_TYPE_VIDEO_CAPTURE
__u32 flags; // 如果压缩的,则Driver 填写:V4L2_FMT_FLAG_COMPRESSED,否则为0
__u8 description[32]; // image format的描述,如:YUV 4:2:2 (YUYV)
__u32 pixelformat; //所支持的格式。 如:V4L2_PIX_FMT_UYVY
__u32 reserved[4]; // 保留
};
// 示例
structv4l2_fmtdesc fmtdesc;
fmtdesc.index=0;
fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1)
{
printf("/t%d.%s/n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
2.3.2 查看、设置当前帧格式 VIDIOC_G_FMT/VIDIOC_S_FMT
利用ioctl VIDIOC_G_FMT. 得到当前设置。
因为Camera为CAPTURE设备,所以需要设置type为: V4L2_BUF_TYPE_VIDEO_CAPTURE,然后Driver会填充其它内容。
struct v4l2_format
{
enum v4l2_buf_type type; // Camera,则用户必须填写:V4L2_BUF_TYPE_VIDEO_CAPTURE
union
{
struct v4l2_pix_format pix; // used by video capture and output devices
struct v4l2_window win;
struct v4l2_vbi_format vbi;
struct v4l2_sliced_vbi_format sliced;
__u8 raw_data[200];
} fmt;
};
// 示例
struct v4l2_format Format;
memset(&Format, 0, sizeof(struct v4l2_format));
Format.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(Handle, VIDIOC_G_FMT, &Format);
// 因为是Camera, 所以采用pix. 现在分析如下:
struct v4l2_pix_format
{
__u32 width; //Image width in pixels.
__u32 height; // Image Height in pixels.
__u32 pixelformat; // Image格式,最常见的有:V4L2_PIX_FMT_YYUV
enum v4l2_field field; //是否逐行扫描,是否隔行扫描. Sam通常采用V4L2_FIELD_NONE,逐行放置数据 (注1)
__u32 bytesperline; //每行的byte数
__u32 sizeimage; //总共的byte数,bytesperline * height
enum v4l2_colorspace colorspace; //This information supplements the pixelformat and must be set by the driver
__u32 priv;
};
设置帧格式 VIDIO_S_FMT
之前通过VIDIOC_ENUM_FMT已经知道Device支持什么Format。 所以直接设置。
设置Image Format ,需要APPLICATION填写的Struct项目有:struct v4l2_format Format;
Format.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
Format.fmt.pix.width = Width;
Format.fmt.pix.height = Height;
Format.fmt.pix.pixelformat= pixelformat; //4L2_PIX_FMT_YUYV
Format.fmt.pix.field = field;
io_rel = ioctl(Handle, VIDIOC_S_FMT, &Format);SamInfo:之前设置了Image Format, 是指每一帧的数据格式,但Stream的行为呢,也需要设置,这就是下面所说的Stream 设置了。它就包含帧数设置和修改。
2.4 得到、设置 stream信息 VIDIO_G_PARM、VDIO_S_PARM
2.4.1 获取 stream信息
// 相关结构体
struct v4l2_streamparm
{
enum v4l2_buf_type type;
union
{
struct v4l2_captureparm capture;
struct v4l2_outputparm output;
__u8 raw_data[200];
} parm;
};
// 示例
struct v4l2_streamparm Stream_Parm;
memset(&Stream_Parm, 0, sizeof(struct v4l2_streamparm));
Stream_Parm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
io_rel = ioctl(Handle, VIDIOC_G_PARM, &Stream_Parm);
// 用户只需要填充type为V4L2_BUF_TYPE_VIDEO_CAPTURE。 Driver就会把结构体中其它部分填充好。// 因为是Camera, 所以使用capture. 它是 struct v4l2_captureparm
struct v4l2_captureparm
{
__u32 capability; //是否可以被timeperframe控制帧数。可以则:V4L2_CAP_TIMEPERFRAME
__u32 capturemode; //是否为高清模式。如果是:
则设置为:V4L2_MODE_HIGHQUALITY。 高清模式会牺牲其它信息。通常设置为0。
struct v4l2_fract timeperframe; //帧数。
__u32 extendedmode; //定制的。如果不支持,设置为0
__u32 readbuffers;
__u32 reserved[4];
};
struct v4l2_fract timeperframe; //帧数。
struct v4l2_fract {
__u32 numerator; // 分子。 例:1
__u32 denominator; //分母。 例:30
};2.4.2 设置stream 信息
// 示例
struct v4l2_streamparm Stream_Parm;
memset(&Stream_Parm, 0, sizeof(struct v4l2_streamparm));
Stream_Parm.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
Stream_Parm.parm.capture.timeperframe.denominator =Denominator;;
Stream_Parm.parm.capture.timeperframe.numerator = Numerator;
io_rel = ioctl(Handle, VIDIOC_S_PARM, &Stream_Parm);2.5 申请和管理缓冲区 VIDIOC_REQBUFS
应用程序和设备有三种交换数据的方法,直接read/write ,内存映射(memorymapping) ,用户指针。这里只讨论 memorymapping.
structv4l2_requestbuffers
{
__u32 count; // 缓冲区内缓冲帧的数目
enumv4l2_buf_type type; // 缓冲帧数据格式
enum v4l2_memorymemory; // 区别是内存映射还是用户指针方式
__u32 reserved[2];
};
enum v4l2_memoy{V4L2_MEMORY_MMAP,V4L2_MEMORY_USERPTR};
//count,type,memory都要应用程序设置
// 示例,申请一个拥有四个缓存帧的缓存区
structv4l2_requestbuffers req;
req.count=4;
req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory=V4L2_MEMORY_MMAP;
ioctl(fd,VIDIOC_REQBUFS,&req);
2.6 获取缓冲帧的地址,长度:VIDIOC_QUERYBUF
structv4l2_buffer
{
__u32 index; //buffer 序号
enumv4l2_buf_type type; //buffer 类型
__u32 byteused; //buffer 中已使用的字节数
__u32 flags; // 区分是MMAP 还是USERPTR
enum v4l2_fieldfield;
struct timevaltimestamp;// 获取第一个字节时的系统时间
structv4l2_timecode timecode;
__u32 sequence;// 队列中的序号
enum v4l2_memorymemory;//IO 方式,被应用程序设置
union m
{
__u32 offset;// 缓冲帧地址,只对MMAP 有效
unsigned longuserptr;
};
__u32 length;// 缓冲帧长度
__u32 input;
__u32 reserved;
};
// MMAP ,定义一个结构体来映射每个缓冲帧。
Struct buffer
{
void* start;
unsigned intlength;
}*buffers;
#include<sys/mman.h>
void *mmap(void*addr, size_t length, int prot, int flags, int fd, off_t offset);
//addr 映射起始地址,一般为NULL ,让内核自动选择
//length 被映射内存块的长度
//prot 标志映射后能否被读写,其值为PROT_EXEC,PROT_READ,PROT_WRITE,PROT_NONE
//flags 确定此内存映射能否被其他进程共享,MAP_SHARED,MAP_PRIVATE
//fd,offset, 确定被映射的内存地址
// 返回成功映射后的地址,不成功返回MAP_FAILED ((void*)-1);
int munmap(void*addr, size_t length);// 断开映射, addr 为映射后的地址,length 为映射后的内存长度
// 示例:将四个已申请到的缓冲帧映射到应用程序,用buffers 指针记录。
buffers =(buffer*)calloc (req.count, sizeof (*buffers));
if (!buffers) {
fprintf (stderr,"Out of memory/n");
exit(EXIT_FAILURE);
}
// 映射
for (unsignedint n_buffers = 0; n_buffers < req.count; ++n_buffers) {
struct v4l2_bufferbuf;
memset(&buf,0,sizeof(buf));
buf.type =V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory =V4L2_MEMORY_MMAP;
buf.index =n_buffers;
// 查询序号为n_buffers 的缓冲区,得到其起始物理地址和大小
if (-1 == ioctl(fd, VIDIOC_QUERYBUF, &buf))
exit(-1);
buffers[n_buffers].length= buf.length;
// 映射内存
buffers[n_buffers].start=mmap (NULL,buf.length,PROT_READ | PROT_WRITE ,MAP_SHARED,fd, buf.m.offset);
if (MAP_FAILED== buffers[n_buffers].start)
exit(-1);
}2.7 启动、停止数据流 VIDIOC_QBUF、VIDIOC_DQBUF
在开始之前,还应当把缓冲帧放入缓冲队列:
VIDIOC_QBUF// 把帧放入队列
VIDIOC_DQBUF// 从队列中取出帧
// 示例:把四个缓冲帧放入队列,并启动数据流
unsigned int i;
enum v4l2_buf_typetype;
for (i = 0; i< 4; ++i)// 将缓冲帧放入队列
{
structv4l2_buffer buf;
buf.type =V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory =V4L2_MEMORY_MMAP;
buf.index = i;
ioctl (fd,VIDIOC_QBUF, &buf);
}
type =V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd,VIDIOC_STREAMON, &type);
// 示例:获取一帧并处理
structv4l2_buffer buf;
CLEAR (buf);
buf.type =V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory =V4L2_MEMORY_MMAP;
ioctl (fd,VIDIOC_DQBUF, &buf);// 从缓冲区取出一个缓冲帧
process_image(buffers[buf.index].start);// 图像处理
ioctl (fd, VIDIOC_QBUF,&buf);// 将取出的缓冲帧放回缓冲区















 1035
1035

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









