






四旋翼飞行器模型预测控制仿真带PPT
四旋翼无人机 四旋翼飞行器模型预测控的MATLAB仿真,纯M代码实现,最优化求解使用了CasADi优化控制库(绿色免安装)。
CasADi我已下到代码目录里,代码到手可直接运行。
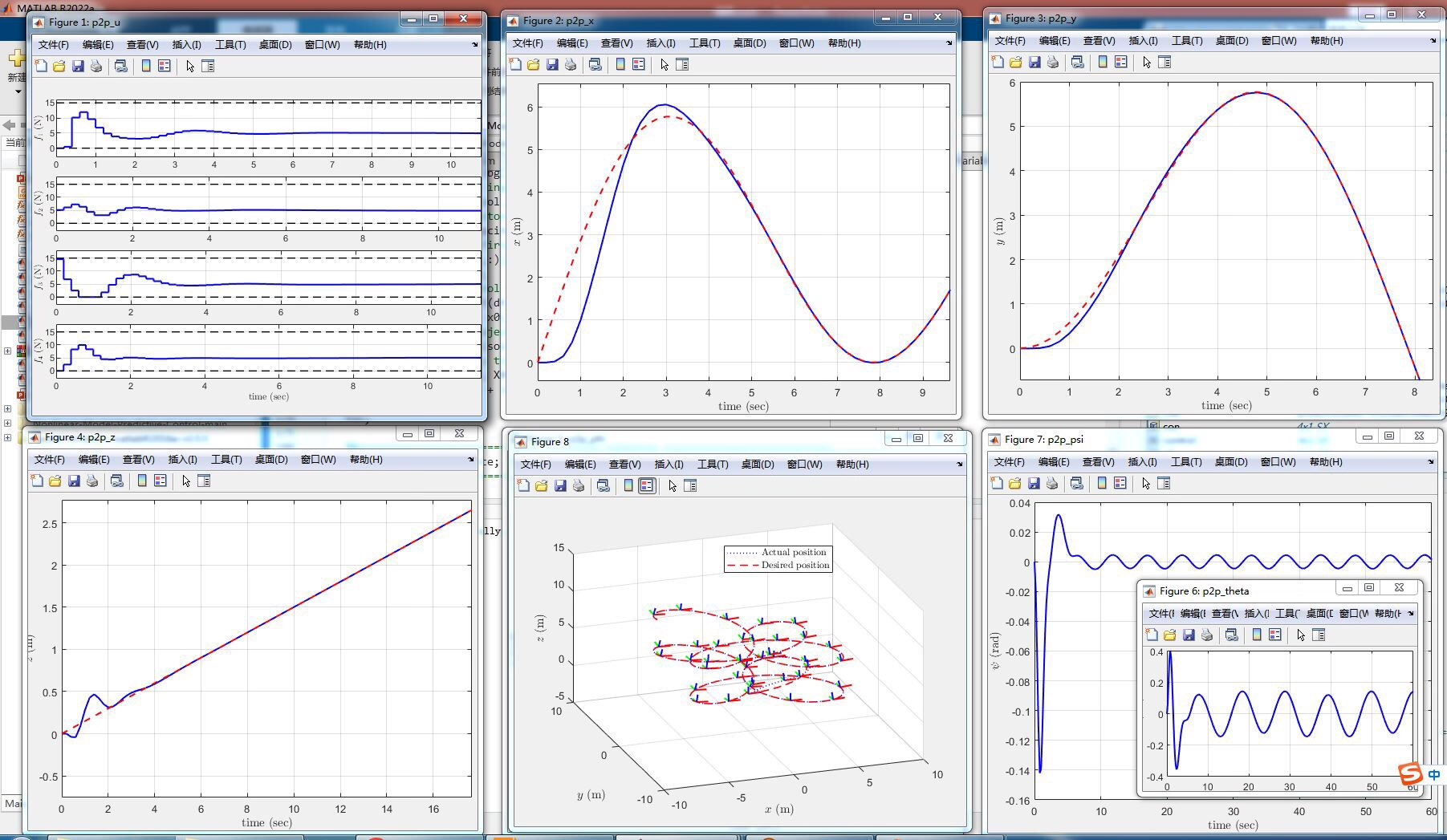
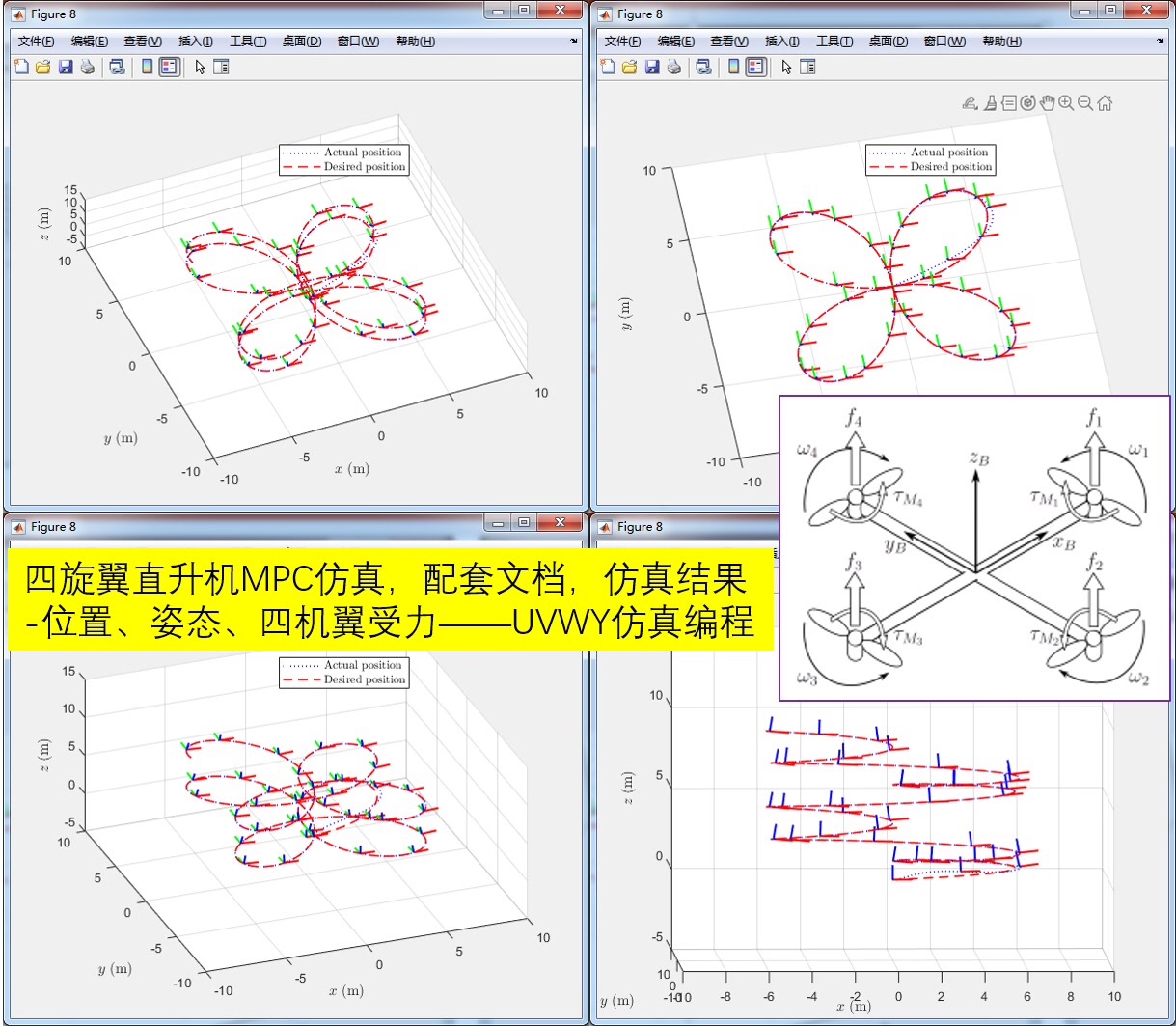
运行完直接plot出附图仿真结果。
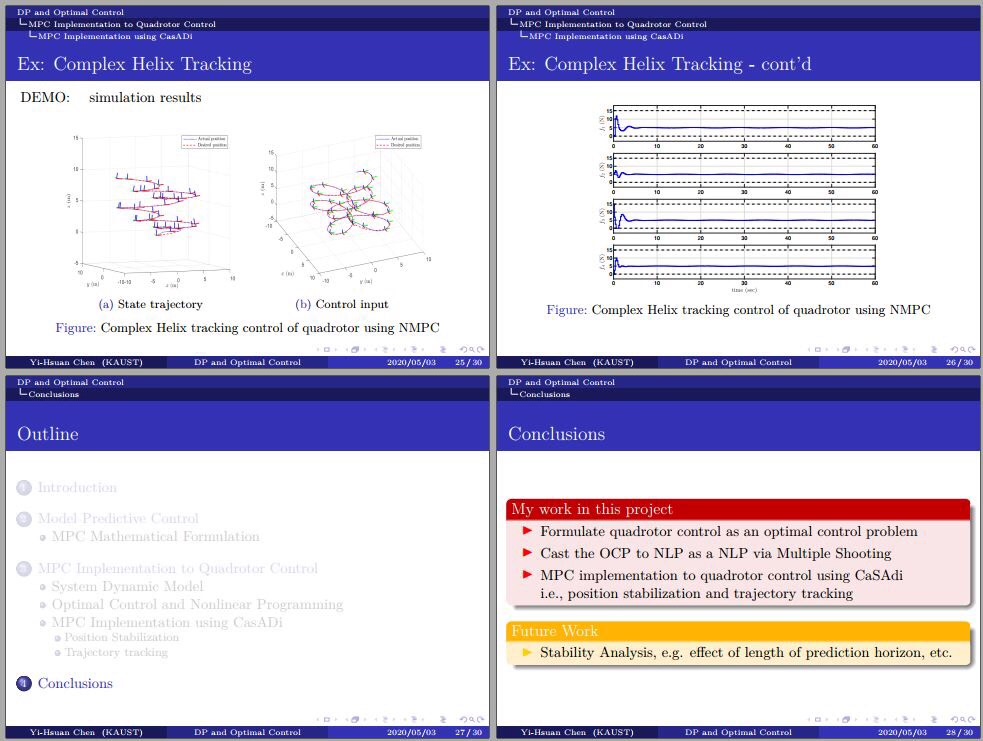
配套30页的ppt,简介了相关原理与模型公式,详见附图。
关联词:无人机轨迹跟踪,无人机姿态控制, MPC控制。
ID:3388724672868184
UVWY仿真编程

四旋翼飞行器模型预测控制仿真带PPT
摘要:本篇文章主要介绍了四旋翼无人机的模型预测控制方法,并基于MATLAB进行了仿真实现。本文使用了CasADi优化控制库,通过对四旋翼飞行器模型的优化求解,实现了无人机的轨迹跟踪和姿态控制。文章附带了30页的PPT,详细介绍了相关原理与模型公式。
关键词:四旋翼无人机、模型预测控制、MATLAB仿真、CasADi优化控制库、无人机轨迹跟踪、无人机姿态控制、MPC控制
引言:
随着无人机技术的不断发展,四旋翼无人机作为其中一种常见的类型,已经广泛应用于航空航天领域、农业、电力巡检等众多领域。而在四旋翼无人机的控制方面,模型预测控制(MPC)方法因其优越的性能而备受关注。本文将基于MATLAB,使用CasADi优化控制库,实现四旋翼飞行器的模型预测控制,并通过仿真结果展示其性能优势。
一、引言四旋翼无人机
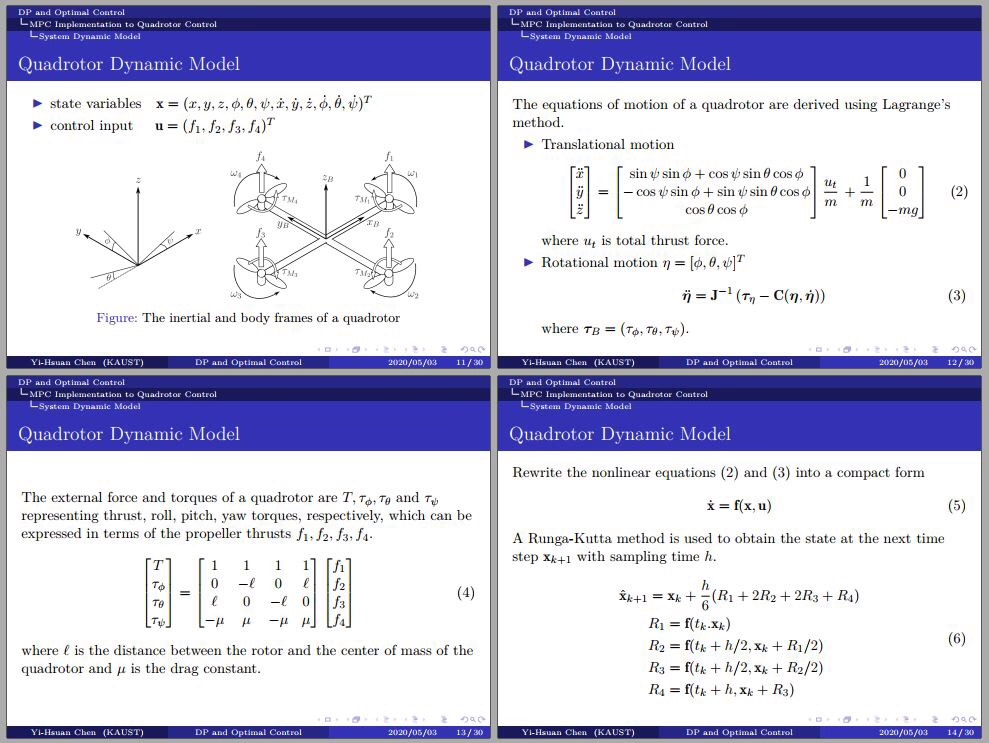
四旋翼无人机是一种通过四个独立驱动的螺旋桨提供升力和推力的飞行器。其灵活性和机动性使其成为许多应用场景中的理想选择,例如航拍摄影、搜索救援等。四旋翼无人机的动力学模型可通过旋翼动力学方程描述,可以根据旋翼和机身的几何特征得到相应的模型。
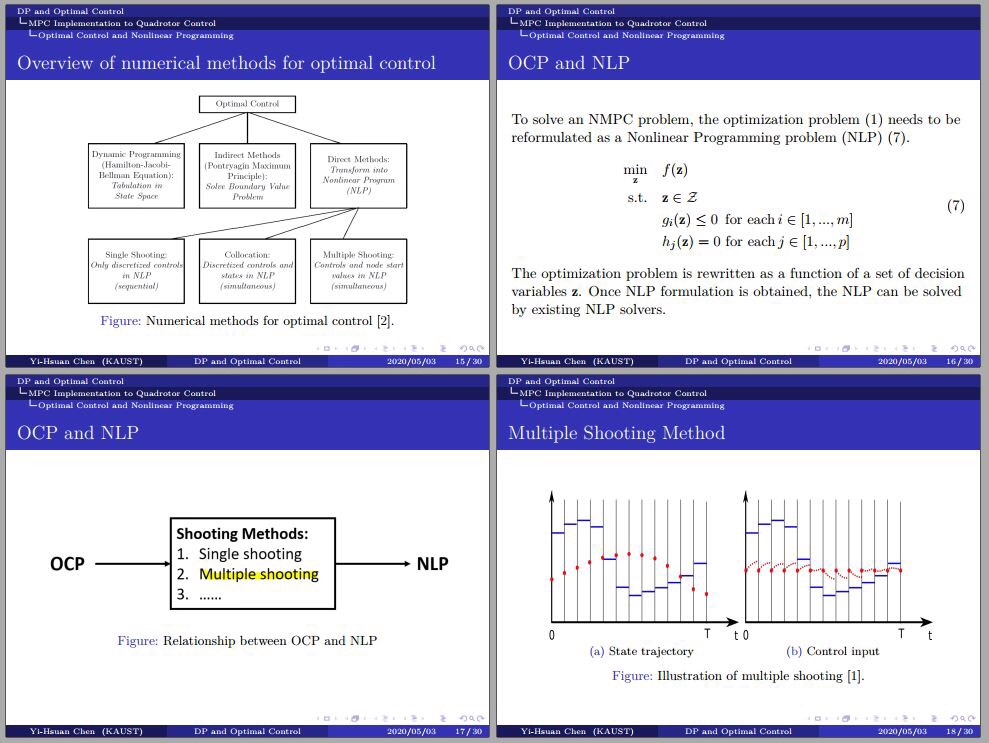
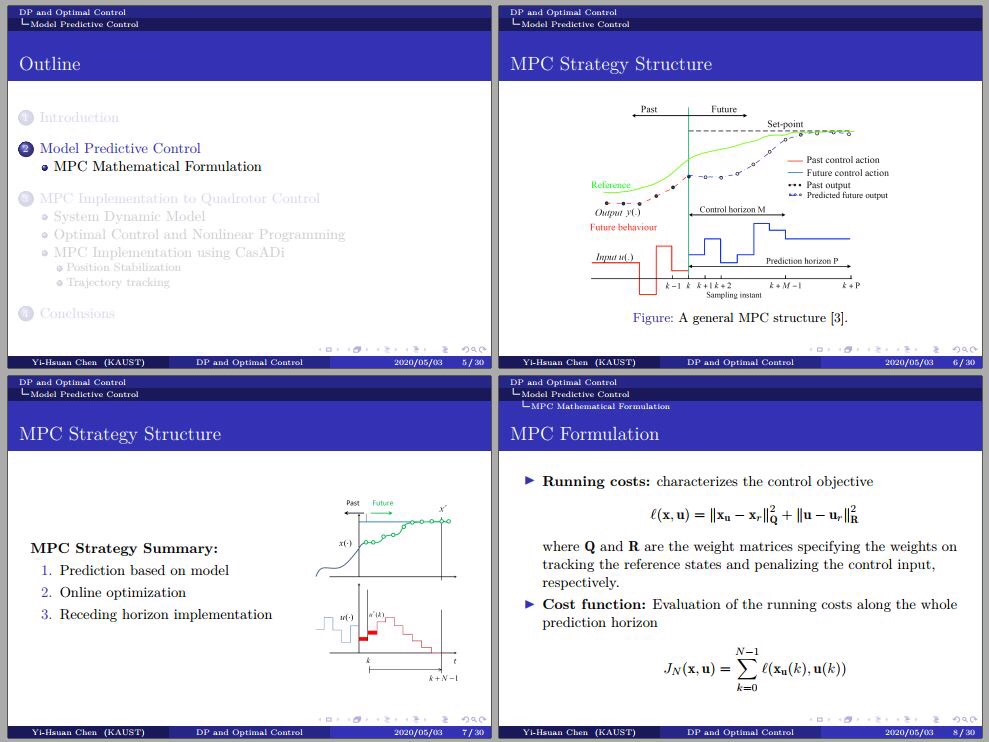
二、模型预测控制方法
模型预测控制(MPC)是一种基于模型的控制方法,其核心思想是通过预测系统未来的行为,计算出最优的控制指令。对于四旋翼无人机来说,MPC方法可以通过对无人机的动力学模型进行预测和优化求解,得到最优的控制策略。本文使用了CasADi优化控制库,在MATLAB环境下实现了四旋翼无人机的MPC控制。
三、MATLAB仿真实现
本文将四旋翼无人机的动力学模型转化为MATLAB代码,并基于CasADi优化控制库对控制策略进行求解。首先,我们需要定义无人机的状态变量和控制变量,并编写动力学方程的函数。然后,在MPC控制循环中,通过对当前时刻的状态进行预测,计算出最优的控制指令,并将其应用于无人机的实际控制中。
四、仿真结果与讨论
通过MATLAB的仿真实验,我们可以验证所提出的四旋翼无人机模型预测控制方法的有效性。在轨迹跟踪方面,通过对预设的轨迹进行优化求解,我们可以观察到无人机能够准确地跟踪设定的轨迹。在姿态控制方面,通过对无人机的姿态进行优化求解,我们可以实现对无人机姿态的精确控制。
五、结论与展望
本文基于MATLAB,使用CasADi优化控制库实现了四旋翼无人机的模型预测控制,并通过仿真实验验证了该方法的有效性。四旋翼无人机的模型预测控制方法在轨迹跟踪和姿态控制方面表现出优于传统控制方法的性能。未来的研究可以进一步优化控制算法,提高控制精度和鲁棒性。
附图1:四旋翼飞行器模型预测控制原理
附图2:CasADi控制库的安装与使用
附图3:MPC控制循环的实现过程
附图4:仿真结果展示
总结:
本文基于MATLAB和CasADi优化控制库,实现了四旋翼无人机的模型预测控制,并通过仿真实验验证了该方法的有效性。通过对轨迹跟踪和姿态控制的优化求解,无人机能够准确地跟踪设定的轨迹和实现精确的姿态控制。该方法在无人机领域具有重要的应用价值,并具有进一步优化和发展的潜力。
【相关代码,程序地址】:http://fansik.cn/724672868184.html
















 2539
2539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









