







 集智联机器人为德国 Franka Robotics GmbH中国区金牌战略合作伙伴,负责Frank Robotics在中国区域的关于Franka机器人的销售、渠道拓展、技术支持等工作。
集智联机器人为德国 Franka Robotics GmbH中国区金牌战略合作伙伴,负责Frank Robotics在中国区域的关于Franka机器人的销售、渠道拓展、技术支持等工作。
本次系列介绍Franka科研版机器人FR3在科学研究中的案例。本文为中文翻译,请参考原文,论文解释权和所有权属于原作者。
用操作规划来配置空间领域的距离
李一鸣1,2 、池学敏1,3, Amirreza Razmjoo1,2和西尔万 ·卡利农1,2
1Idiap研究所2伊诺克 ·普拉特自由图书馆3浙江大学
项目页面:https://sites.google.com/view/cdfmp/home
摘要-有符号距离场(SDF)是机器人技术中一种流行的隐式形状 表示法,它以一种易于与控制、优化和学习技术相结合的形式提供 关于物体和障碍物的几何信息。通常情况下,sdf被用来表示任务空 间中的距离,这与我们在3D世界中感知到的熟悉的距离概念相对应 。然而,sdf可以在数学上用于其他空间,包括机器人配置空间。对 于机器人机械手,这个配置空间通常对应于机器人的每个关节的关 节角度。虽然在机器人规划中习惯于表示配置空间的哪些部分不与 障碍物碰撞,但很少将这些信息视为配置空间中的距离场。在本文 中,我们展示了在机器人配置空间中考虑sdf进行优化的潜力,我们 称之为配置空间距离场(简称CDF) 。与在任务空间中使用SDF类似 , CDF提供了一个有效的关节角度距离查询和直接访问导数(关节角 度速度)。大多数方法将任务空间中的一部分分割整个计算,然后 在配置空间中分割一部分(计算任务空间中的距离,然后用逆运动 学计算动作) 。相反,CDF允许通过控制、优化和学习问题以统一的 方式利用隐式结构。特别地,我们提出了一种有效的算法来计算和 融合CDFs,可以推广到任意场景。在提高计算效率的同时,提出了 一种利用多层感知器(MLPs)对应的神经CDF表示方法, 以获得一种 紧凑而连续的表示方法。我们用平面避障例子和7轴Franka机器人证 明了CDF在逆运动学和操作规划任务中的有效性。项目页面:
https://sites.google.com/view/cdfmp/home
1.介绍
距离是最基本和最直观的指标
用来表示多个变量之间的相互关系。在机器人技术中,它们 通常被用于测量不同表示之间的几何关系,如点、姿态、轨 迹、表面和形状,这些表示被用于各种任务,包括逆运动学 [22,4]和操作规划[18]。有符号距离场(SDF)表示方法已 经成为一种流行的表示方法,例如,它可以用于编码从一个 点到一个对象边界的欧氏距离。可微性和单位范数梯度特性 使其很容易集成到学习[41,6,37]、优化[27,28,36]和控制 [5,26,17]中。
sdf通常用于三维任务空间中。在操作的背景下,一个典 型的控制任务由两个步骤组成,首先使用任务空间中的SDF 来评估到对象的距离,然后是一个逆运动学步骤,找到可以减少此距离的关节角度配置。由于任务空间 和联合空间之间存在非线性映射,该问题通常通过二阶优化 迭代(对应于每次迭代使用雅可比伪逆)来解决。
图1-左描述了在配置空间中可视化的这个过程,其中整个 距离场被计算为彩色水平集(在实践中,我们只在机器人当 前的关节配置下评估前向运动学函数和相关的雅可比矩阵)。
虽然sdf通常用于三维任务空间,但也可以考虑在其他空 间中,包括发生规划和控制问题的机器人关节配置空间。我 们在图1-左中看到,当我们将一个SDF从任务空间转换到配置 空间时,单位范数梯度的属性消失了,而在图1-右中,这个 属性保持不变。我们将这种方法称为配置空间距离场(CDF) , 这是一个标量场,测量配置空间中关节角度和物体几何形 状之间的角距离。1-右)。对于操作任务,CDF直接估计机器 人与物体建立接触所需的最小关节运动,梯度一致地指向物 体。与任务空间中的SDF不同,CDF是直接在构型空间中表示 的,保持了距离场的欧氏性质,确保了距离的均匀跨度,并 保持了梯度方向上的单位大小。
CDF有几个优点。它自然地连接了任务空间和配置空间,
为问题提供了统一的方法来解决传统的计算。例如,逆运动 学问题通常是通过评估任务空间距离,然后计算关节空间运 动来解决的。相比之下,CDF通过一步梯度投影来解决了这 个问题,避免了高斯-牛顿迭代。它还提供了直观的测地线 , 反映对象几何在配置空间,见图。1.此外,CDF继承了SDF 的优点,包括隐式结构、涉及多个SDF的组合的布尔操作、
高效的查询和可微性。我们还提出了一种被称为神经CDF的 神经变体。与神经SDFs类似,神经CDFs还提供了一种紧凑的 、连续的、分析性的和潜在的空间表示,从而促进了无缝集 成到学习、优化和控制框架中。大多数为sdf开发的方法都 可以直接应用于CDF,它直接解决了配置空间中的问题。
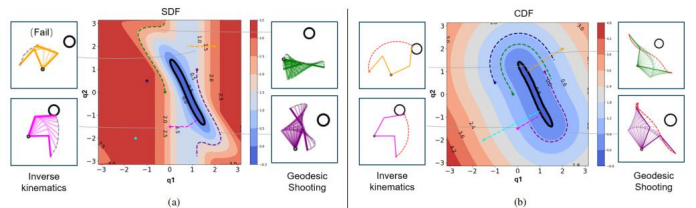
图1 : SDF和CDF之间的差异。彩色的水平集描述了到物体的距离,其中黑色的轮廓表示导致机器人-物体表面接触的关节角度。SDF和CDF的 零水平集是相同的,但CDF的其他水平集具有均匀扩展距离和单位范数梯度的特征。这一特性导致了可以直接计算的梯度投影,这一步解决 了接触任务的逆运动学问题(见青色和粉红色的轨迹),而SDF在遇到奇点时需要多次迭代,甚至可能由于梯度消失而失败(见黄色的轨迹 ) 。CDF上的测地线自然地包裹在配置空间中的物体的形状上(参见蓝色、绿色和紫色的轨迹)。
本文的组织结构如下。第二节回顾了相关的工作。第三节 讨论了CDF的公式、性质、计算和融合策略。第四节是隐式 神经CDF表征。第五节VI证明了CDF的有效性身体逆运动学和操作计划任务。第七节对本文进行了讨论和 总结。本文的主要贡献是:
CDF表示法的引入,为解决配置空间中的机器人操作挑战 提供了一个统一的框架。
一种计算对象在配置空间中的零水平集几何形状的有效算 法,对应于将导致碰撞的机器人配置集。随后还提出了 一种融合策略,将多个CDF在线结合起来,使CDF能够推 广到不同的场景。
一种利用多层感知器(MLP)的神经CDF变体,并设计相应 的损失函数,从而产生一个简洁和连续的表示。这种变 化提供了跨效率、准确性和压缩能力的权衡,同时保持 了一个简单和灵活的结构。
在平面机器人和7轴Franka机器人上比较CDF与SDF及其导 数的实验。这些实验突出了CDF通过梯度投影解决逆运 动学任务的效率,以及它在解决操作规划挑战方面的有 效性,从而产生了自然的机器人运动。
2 .相关工作
SDFs在计算机版本和图形学领域获得了广泛的关注,特别 是在形状编码[25,9]、网格生成[31]和可微渲染[39,20]方 面。它们在距离和梯度查询方面的功效使它们在机器人技术 中很受欢迎,并在规划[27,45],映射[10],和操作[6]。最近的研究提出用关 节角[14]进行SDF编码,或学习机器人操纵器[19]扫体积的 SDF表示,以对铰接机器人的SDF建模,并将其应用于操作任 务[16]。
机器人技术中对sdf的主要关注集中在任务空间上,其中 配置空间动作通常是通过两个空间[33,29]之间的映射来独立 计算的。现有的方法通常使用表示联合配置[32,42]的碰撞状 态的二进制映射来对配置空间进行建模,以支持基于样本的 运动规划算法[43,3,11]。尽管取得了重大进展,但由于缺乏 梯度信息,这些控制和规划策略在高维空间的计算上是昂贵 的。
相比之下,在配置空间中考虑一个距离场引入了新的控制 和规划策略,通过将焦点从传统的二进制碰撞掩模转移到连 续的和结构化的表示。例如,使用这种方法,逆运动学问题 简化为构型空间中的SDF回拉,只需要一个梯度投影。更一 般地说,CDF能够将为任务空间开发的SDF方法转换到配置空 间。计算可以看作是一个点质量系统,而障碍在构型空间中 形成拓扑孔,测地线在它们周围产生自然的弯曲路径[28]。该方法可以推广到几何运动规划框架中,包括黎曼运动策略 [29]、几何结构[38],以及通过在距离场[13,1]上分配度量 而进行的动态感知运动优化。
3.配置空间距离字段(CDF)
在本节中,我们将介绍CDF并深入研究它的特性。然后, 我们提出了一种有效的计算CDF的算法, 以及一种在线多重
组合的融合策略 CDFs。
算法1查找0 leve l设置配置
输入:第p点,机器人SDF模型fs
输出:接头配置q\满足fs(p, q\) = 0
初始化:q←q0对于t ▷批初始化
= 1,。..,T ▷T迭代
c ← c(q) ▷计算成本
δ q ← − H − 1 ▽ qc ▷批处理L-BFGS更新
q ← q +
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









