







【0】README
1)本文旨在给出 ReviewForJob——最小生成树(prim + kruskal)源码实现和分析, 还会对其用到的 技术 做介绍;
2)最小生成树是对无向图而言的:一个无向图G 的最小生成树是一个连通图,且保证该连通图 所含边的权值和最小;
3)要知道 Prim算法(普利姆算法)的基本 idea 就是 迪杰斯特拉算法,下面会介绍,所以我会po 出 迪杰斯特拉算法的 相关介绍;
4)下面的内容(参见迪杰斯特拉算法)转自 http://blog.csdn.net/pacosonswjtu/article/details/52125636 :其实,说白了:广度优先搜索算法(计算无权最短路径) 是基于 拓扑排序算法的,而 迪杰斯特拉算法(计算有权最短路径) 是基于 广度优先搜索算法或者说是它的变体算法;上述三者不同点在于: 拓扑排序算法 和 广度优先搜索算法 使用了 循环队列, 而迪杰斯特拉算法使用了 二叉堆优先队列作为其各自的工具;相同点在于:他们都使用了 邻接表来表示图;所以 普利姆算法 也是基于 广度优先搜索算法的,且要使用二叉堆优先队列用于选取 权值最小的边;
5)需要事先知道的是:寻找最小生成树有两种alg—— 普利姆算法 和 克鲁斯卡尔算法,普利姆算法过程中有且只有一个连通图,而克鲁斯卡尔算法过程中 会形成多个 连通图;且 克鲁斯卡尔算法使用到了路径压缩,提高了find() 操作的效率,文末会讲到;
【1】Prim算法(普利姆算法) prim alg 源码
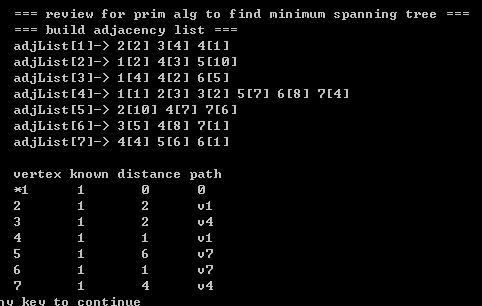
1)intro:普利姆算法用于在 无向图中寻找 最小生成树,其基本idea 同 迪杰斯特拉算法,上面已经提及过了;
2)与迪杰斯特拉算法不同的地方在于: 权值更新操作,废话不多说,上代码;
补充)普利姆算法的结束标志:当 所有顶点的状态都是已知(known==1)的时候,算法结束;
// 所有点相连的边的权值最小.
// adj:邻接表(图的标准表示方法), table: 计算无权最短路径的配置表,heap:用于选取最小权值的邻接顶点的小根堆.
void prim(AdjList adj, UnWeightedTable table, int startVertex, BinaryHeap heap)
{
int capacity=adj->capacity;
Vertex* arrayVertex = adj->array;
Vertex temp;
Entry* arrayEntry = table->array;
int index; // 顶点标识符(从0开始取)
int adjVertex;
struct HeapNode node;
int weight;
int i=0; // 记录已知顶点个数( known == 1 的 个数).
//step1(初始状态): startVertex 顶点插入堆. startVertex 从1 开始取.
node.vertex=startVertex-1; // 插入堆的 node.vertex 从 0 开始取,所以startVertex-1.
node.weight=0;
insert(heap, node); // 插入堆.
arrayEntry[startVertex-1]->dv=0;
arrayEntry[startVertex-1]->pv=0;
// 初始状态over.
// step2: 堆不为空,执行 deleteMin操作. 并将被删除顶点的邻接顶点插入堆.
while(!isEmpty(heap))
{
if(i == capacity) // 当所有 顶点都 设置为 已知(known)时,退出循环.
{
break;
}
index = deleteMin(heap).vertex; // index表示邻接表下标,从0开始取,参见插入堆的操作.
arrayEntry[index]->known=1; // 从堆取出后,将其 known 设置为1.
i++; // 记录已知顶点个数( known == 1 的 个数).
temp = arrayVertex[index];
while(temp->next)
{
adjVertex = temp->next->index; // 顶点index 的邻接节点标识符adjVertex 从1开始取.
weight = temp->next->weight; // 顶点index到其邻接顶点 的权值.
if(arrayEntry[adjVertex-1]->known == 0) // 注意: 下标是adjVertex-1, 且known==0 表明 adjVertex顶点还处于未知状态,所以adjVertex插入堆.
{
// prim 算法的代码版本.
if(arrayEntry[adjVertex-1]->dv > weight ) // [key code] 当当前权值和 比 之前权值和 小的时候 才更新,否则不更新.
{
node.vertex=adjVertex-1; // 插入堆的 node.vertex 从 0 开始取.
node.weight=weight;
insert(heap, node); // 插入堆.
arrayEntry[adjVertex-1]->dv = weight; // [also key code]
arrayEntry[adjVertex-1]->pv=index+1; // index 从0开始取,所以index加1.
}
/* dijkstra 算法的代码版本.
if(arrayEntry[adjVertex-1]->dv > arrayEntry[index]->dv + weight ) // [key code] 当当前权值和 比 之前权值和 小的时候 才更新,否则不更新.
{
node.vertex=adjVertex-1; // 插入堆的 node.vertex 从 0 开始取.
node.weight=weight;
insert(heap, node); // 插入堆.
arrayEntry[adjVertex-1]->dv = arrayEntry[index]->dv + weight; // [also key code]
arrayEntry[adjVertex-1]->pv=index+1; // index 从0开始取,所以index加1.
}*/
}
temp = temp->next;
}
//printWeightedtable(table, 1); // 取消这行注释可以 follow 迪杰斯特拉 alg 的运行过程.
}
} A1)普利姆算法的权值更新: 新权值== 其前驱顶点->该顶点的权值(weight);
A2)迪杰斯特拉算法的权值更新:新权值== 其前驱的前驱顶点-> 前驱的权值(arrayEntry[index]->dv) + weight;
【2】Kruskal 算法(克鲁斯卡尔算法)克鲁斯卡尔源码
1)intro:连续地按照最小的权选择边,并且当所选的边不产生圈时就把它作为取定的边;
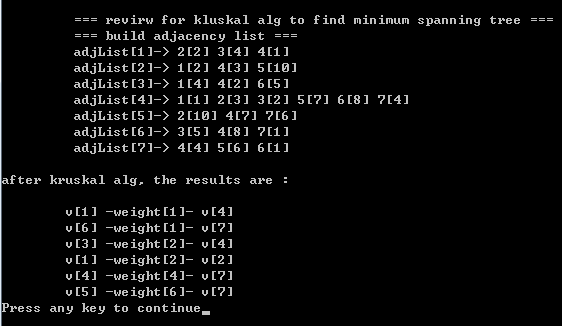
2)克鲁斯卡尔算法由多个连通图:将多个连通图进行合并,最终只有1个连通图,当添加到 连通图的边足够多时书法终止(如 顶点数目为7, 则当添加的边数为6 则算法终止);事实上,克鲁斯卡尔算法就是要决定边 应该添加还是应该放弃;
3)克鲁斯卡尔算法用到的技术:
tech1)二叉堆优先队列:用于选取权值最小的边(deleteMin(binaryHeap)操作来完成);
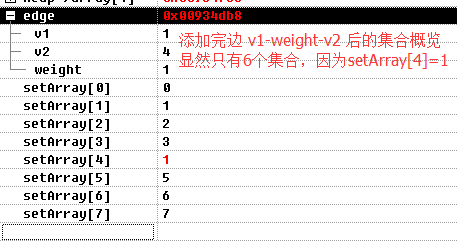
tech2)克鲁斯卡尔算法就是要决定边 应该添加还是应该放弃,这里用到了不相交集 ADT 的union/find 操作,当find(v1) 返回的集合标识 和 find(v2) 返回的集合标识不同时,则添加边(v1,v2);否则放弃添加;
// 克鲁斯卡尔算法 用于寻找 最小生成树. // 为什么这里没有把 邻接表作为参数传进来,因为即使将其作为参数,其还是要转化为 堆, // 所以,为了算法的简洁性,在调用 kruskal() 方法前 就将 邻接表转化为 二叉堆优先队列了. void kruskal(BinaryHeap heap, int* setArray, Edge* edgeSet, int edgeNum) // 当顶点数=7时,edgeNum=6 因为 7个顶点最多6条边. { int i=0; Edge edge; int set1, set2; while(!isEmpty(heap) && i<edgeNum) { edge = deleteMin(heap); // edge 不可能为空,因为heap 不为空(while循环)。 set1 = find(setArray, edge->v1); set2 = find(setArray, edge->v2); // 克鲁斯卡尔算法就是要决定边 应该添加还是应该放弃 if(set1 != set2) // 如果 v1 和 v2 不属于同一个集合,边就进行合并. { // setUnion begins. edgeSet[i++] = edge; // 添加边. setArray[set2] = set1; //更新 edge->v2 的根的 集合标识. 而不能写成setArray[edge->v2] = set1; // setUnion over. } } }tech3)为了提高find() 操作的效率,使用到了 路径压缩。为什么需要路径压缩? 因为集合合并涉及两个操作:find 和 merge/setUnion 操作,又 find() 操作的执行效率取决于 树的高度,所以要进行路径压缩,减少树的高度(路径长度)(补充:路径压缩定义——设操作是 find(x),此时路径压缩的效果是 从 x 到 根的路径上的每一个节点(包括x,但不包括根)都作为根的直接儿子) 路径压缩基础参见 路径压缩基础知识
// 寻找 index标识的 顶点 所在的集合. // find() 涉及到路径压缩,路径压缩 基于 栈来实现(先进后出). int find(int* setArray, int index) { int temp = index; int i=0; while(index != setArray[index]) { stack[i++] = index; // index 从 1 开始取,stack 的元素 也从 1 开始取. index = setArray[index]; // setArray 下标从1 开始. } // 下面进行路径压缩(基于栈的观点). while(--i >= 0) { setArray[ stack[i] ] = index; } return index; }对以上代码的分析(Analysis):路径压缩是基于 不相交集 find 和 setUnion 操作,下面对其做分析
A1)起初,所有顶点都是一个集合,每个集合中只有一个顶点,有多少个顶点就有多少个集合,即setArray[i] = i(要知道0号下标不用的,这样为了编程方便),setArray[i] 中保存的是 仅仅是集合的标志;
A2)对边 执行 setUnion() 即合并之前,要执行find() 操作,查看 边的两个顶点 是否属于同一个集合,好比 v1-weight-v2 == edge 这条边, setArray[v1] == setArray[v2]? 如果它们返回的集合标识符相等,则放弃合并;否则将它们进行合并;
A3)合并也要分两个步骤: step1)将边添加到 edgeSet 集合中;step2)更新 任意一个顶点的根的集合 而不是 一个顶点的集合,这里是很重要的 ;什么叫做根? 但 setArray[i] == i 的时候,我们认为 i标识所在的顶点叫做根;
看个合并荔枝)说了这么多,还不如一个荔枝来的快:再次提醒 当 setArray[i]==i 的时候,i标识的顶点才是根,才是集合的根,或是集合的标识;

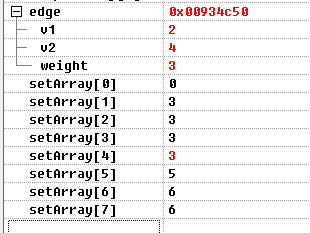
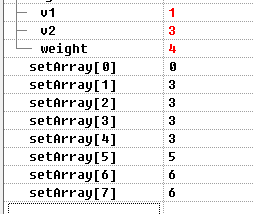

看个荔枝)什么叫路径压缩?在源码实现的测试用例中,通过堆的deleteMin 依次选择权值最小的边并添加到 edgeSet中,参考上述调试结果,我们知道选择顺序是 (v1, v4) (v6, v7) (v3, v4)(v1, v2) (v2, v4) (v1,v3) (v4, v7) (v3, v6) (v5, v7);
下面我们依次来分析 什么叫做路径压缩:
step1)(v1,v4) 被添加后,setArray[4]=1,又 setArray[1]=1(满足根的定义),所以v4 和v1 一样属于集合1;
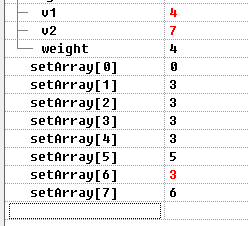
step2)(v6, v7)被添加后,setArray[7]=6, 又 setArray[6]=6(满足根的定义),所以 v7 和 v6 一样属于集合6;
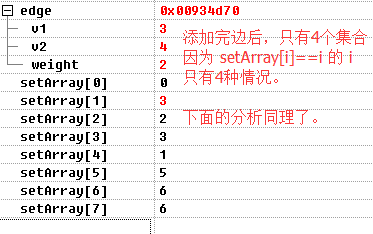
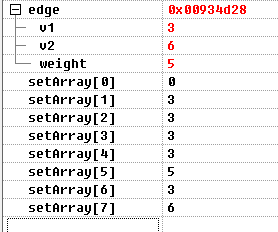
step3)(v3, v4) 被添加后,setArray[4]=1,setArray[1]=3, setArray[3]=3;因为 顶点4的根是顶点1,所以其根要和顶点3 属于同一个集合,则setArray[1]=3,下次find(4) 的路径为 setArray[4]=1 -> setArray[1]=3 -> setArray[3]=3(满足根的定义,over)
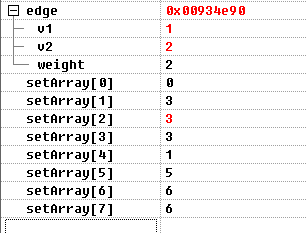
step4)(v1, v2)被添加后,setArray[2]=3,因为顶点3是顶点1 的 根;
step5)(v2,v4) v2 和 v4 属于同一集合,放弃添加;但是我们发现 setArray[4]=3 了,之前setArray[4]=1的,看看之前的结构是 根3->1->4, 再看看之后的结构是 根3->4 , 根3->1,这就是路径压缩的一个荔枝,因为顶点4 离根3 近了,这就提高了 find的查找效率,以前find(4) 的路径为2,现在的路径为1 因为直接就找到 顶点4的根3了;再次提醒,有兴趣的同学可以参考 路径压缩基础知识















 1251
1251











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









