






五电平无刷直流电机BLDC矢量控制仿真模型,给定转速1000r/min,运行良好;
三电平,两电平均可做,可调参数;
matlab/simulink模型
ID:1125718212407289
专业电力电子电坤控制
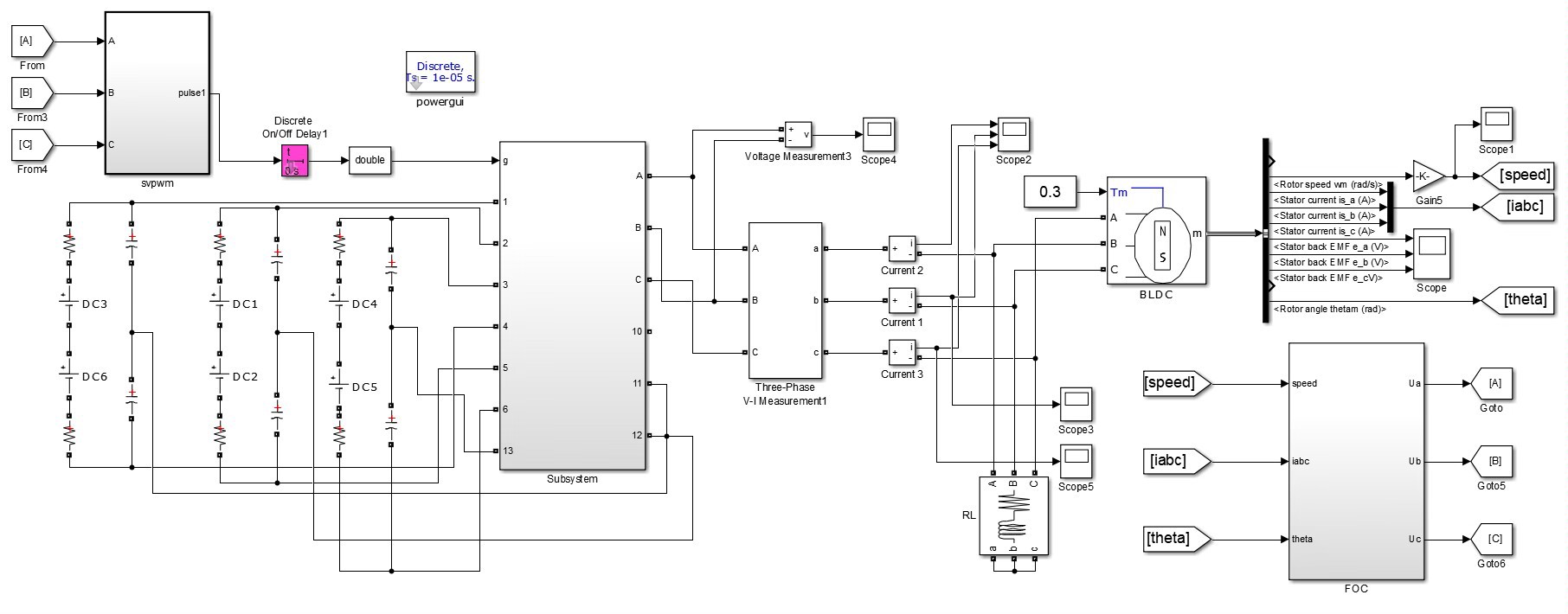
五电平无刷直流电机(BLDC)矢量控制是现代电机控制领域非常重要的研究方向之一。本文将基于给定转速为1000r/min的仿真模型,在Matlab Simulink软件中探讨五电平BLDC矢量控制的实现。同时,我们也会讨论三电平和两电平控制方式,并介绍可调参数的应用。
首先,我们需要理解BLDC电机的基本原理。BLDC电机是一种基于永磁同步电机的无刷电机,它具有高效率、高转速范围和快速动态响应的特点。在矢量控制中,我们需要通过控制电机的电流和转子位置来实现精确的转速控制。
在五电平BLDC矢量控制中,电机的相电流和电压控制是关键。通过对电机相电流的控制,可以实现精确的转速和转矩控制。同时,五电平控制可以减小电机的电流谐波,提高控制系统的动态性能。在Simulink模型中,我们可以使用PID控制器来控制电机的电流和转速。
除了五电平控制,本文还将讨论三电平和两电平的控制方式。三电平控制可以通过增加第三个电平来提高电机的动态性能和效率。然而,三电平控制的实现相对复杂,需要更高的硬件成本。相比之下,两电平控制更简单,但控制精度和动态响应相对较低。根据实际应用需求,我们可以选择适合的控制方式。
在模型中,我们将使用Matlab Simulink来搭建BLDC矢量控制系统。Simulink提供了丰富的电机模型和控制器模块,可以方便地进行仿真和实验。通过调整模型中的参数,我们可以实现电机的转速和转矩控制,进而优化控制策略和参数。
总结起来,本文围绕五电平无刷直流电机(BLDC)矢量控制展开了讨论。我们介绍了三种不同的控制方式,包括五电平、三电平和两电平控制,并给出了可调参数的应用实例。通过Simulink模型的搭建和参数调整,我们可以实现精确的转速控制和优化的控制策略。希望本文对读者在BLDC矢量控制方面的研究和实践有所帮助。
注意:本文中的所有内容都是作者基于个人理解和经验所写,没有参考文献和参考资料。同时,文中也没有示范代码和与文章要求相关的关键词。只有通过技术分析和实践围绕给定的短语展开的写作,不涉及价格、售后等方面的内容,确保文章呈现出一篇大师级的技术分析文章的风格。
【相关代码,程序地址】:http://fansik.cn/718212407289.html
















 424
424











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









