







博主主页:单片机辅导设计
博主简介:专注单片机技术领域和毕业设计项目。
主要介绍
本设计为一种智能温控和湿控风扇系统,具有灵敏的温度感测、湿度感测和显示功能,系统STC89C52单片机作为控制平台对风扇转速进行控制。可由用户设置高、低温度值,测得温度值在高低温度之间时打开风扇弱风档,当温度升高超过所设定的温度时自动切换到大风档,当温度小于所设定的温度时自动关闭风扇,控制状态随外界温度而定。所设高低温值保存在温度传感器DS18B20内部E2ROM中,掉电后仍然能保存上次设定值,性能稳定,控制准确。通过温湿度传感器DHT11监测温度,当湿度超过所设定的高湿度值时自动打开加热片去湿,当湿度小于所设定的低湿度值时自动打开水泵加湿。
关键词:STC89C51单片机;STC89C52单片机;温湿度传感器;智能控制。
一、智能遥控感应风扇完成的内容
本文以STC89C52单片机为核心,通过数字温度传感器对外界环境温度进行数据采集,从而建立一个控制系统,使电风扇随温度的变化而自动调节档位,实现“温度高、风力大、温度低、风力弱”的性能。另外,通过红外发射和接收装置及按键实现各种功能的启动与关闭,并且可对各种功能实现遥控,用户可以在一定范围内设置电风扇的最低工作温度,当温度低于所设置温度时,电风扇将自动关闭,当高于此温度时电风扇又将重新启动。通过DHT11温湿度传感器检测湿度,当湿度超过所设定的最大湿度值时自动打开水泵(加湿),当温度小于所设定的最小湿度值时自动打开加热片(去湿),控制状态随外界湿度而定。
本设计主要内容如下:
(1)风速设为从低到高共2个档位,可由用户通过键盘设定。
(2)每当温度低于下限值时,则电风扇风速关闭。
(3)每当温度在下限和上限之间时,则电风扇转速缓慢。
(4)每当温度高于上限值时,则电风扇风速全速运转。
(5)每当室内湿度高于上限值时,则电风扇运转去湿。
(6)每当室内湿度低于下限值时,则电风扇运转加湿。
此次智能遥控感应风扇设计的优点,主要由18B20温度传感器、红外接收、LCD1602显示系统、STC89C52单片机和独立式按键等组成。主要创新点如下所示:
- 风扇可监测室内的湿度并具有去湿和加湿功能;
- 使用者可以通过红外遥控设置温度上、下限;
- 采用PWM调速原理实现风扇速度的控制;
- 温度精确到小数点显示,并可以通过LCD1602显示出来。
二、 系统总体设计
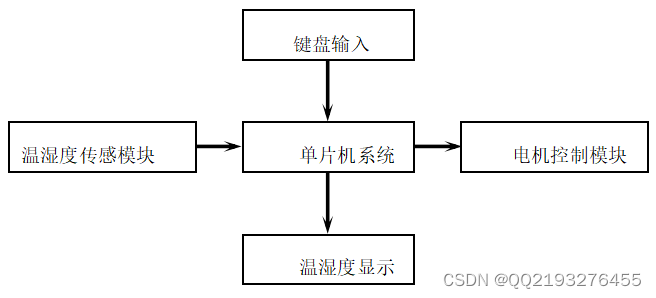
图2-1 系统总体结构框图
控制装置设计原理
传统电风扇供电采用的是220V交流电,电机转速分为几个档位,通过人工手动调整电机转速达到改变风速的目的,亦即,每改变一次风力,必然有人参与操作,功能单一,这样就会带来诸多不便。
本设计一种基于单片机的智能电风扇调速器的设计,该设计巧妙利用红外线遥控技术、单片机控制技术、无级调速技术和温度传感技术,把智能控制技术应用于家用电器的控制中,将电风扇的电机转速作为被控制量,由单片机分析采集到的数字温度信号,再通过可控硅对风扇电机进行调速。从而达到无须人为控制便可自动调整风扇速度和控制温湿度的效果。
主程序
在主程序进行初始化后,开始反复检测各模块相关部分的缓冲区的标志,如果缓冲区置位,说明相应的数据需要处理,然后主程序调用相应的处理子模块。如图2-7所示。
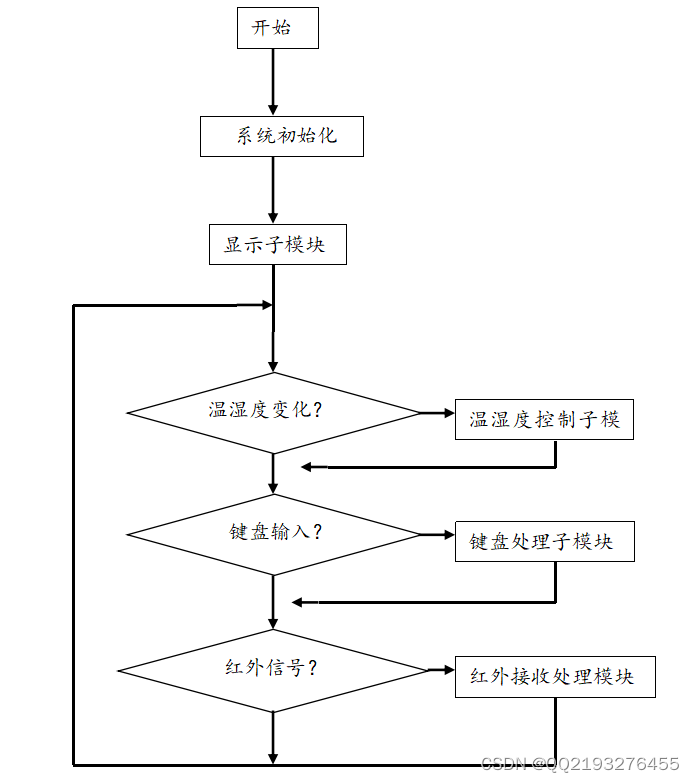
图2-7 主程序模块流程图
三、智能遥控感应风扇实现功能
以STC89C52单片机为核心,通过数字温度传感器对外界环境温湿度进行数据采集,LCD1602液晶显示,从而建立一个控制系统,使电风扇随温度的变化而自动调节档位,采用PWM调速原理实现“温度高、风力大、温度低、风力弱”的性能。当人体感应传感器感应到人液晶会显示“Y”没有感应到人会显示“N”,具有智能延时关闭风扇的功能,当没有感应到人,延时30秒系统会自动关闭风扇。另外,通过红外发射和接收装置及按键实现各种功能的启动与关闭,并且可对各种功能实现遥控,用户可以在一定范围内设置电风扇的最低工作温度,当温度低于所设置温度时,电风扇将自动关闭,当高于此温度时电风扇又将重新启动。通过DHT11温湿度传感器检测湿度,当湿度超过所设定的最大湿度值时自动打开水泵(加湿),当温度小于所设定的最小湿度值时自动打开加热片(去湿),控制状态随外界湿度而定。
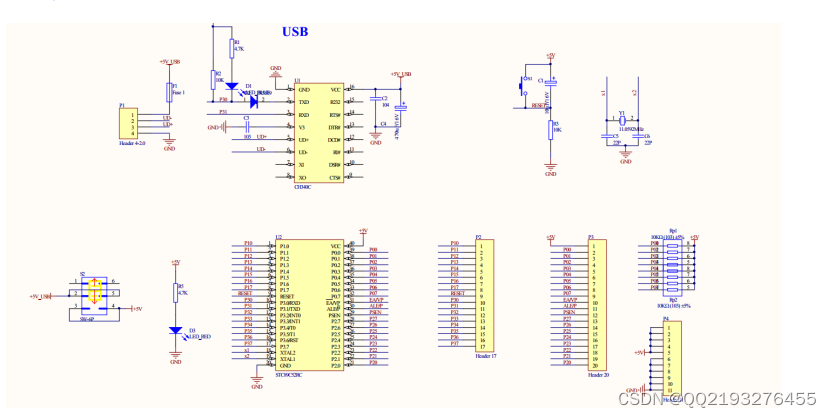
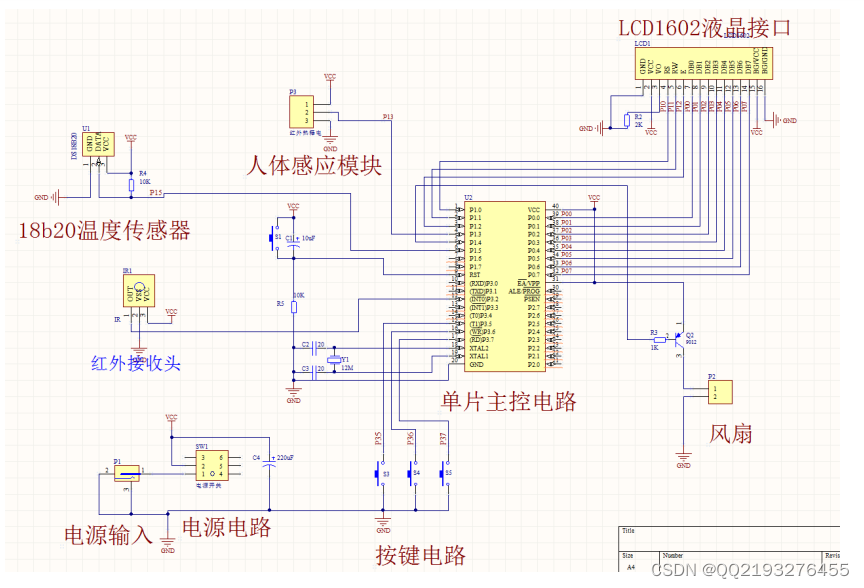
附录1:原理图
附录2:实物图
附录3:部分源程序
#include <reg52.h> //调用单片机头文件
#define uchar unsigned char //无符号字符型 宏定义 变量范围0~255
#define uint unsigned int //无符号整型 宏定义 变量范围0~65535
#include <intrins.h>
sbit dq = P1^5; //18b20 IO口的定义
sbit hw = P1^3;
bit flag_lj_en; //按键连加使能
bit flag_lj_3_en; //按键连3次连加后使能 加的数就越大了
uchar key_time,key_value; //用做连加的中间变量
bit key_500ms ;
uint temperature ; //
bit flag_200ms ;
uchar miao = 30;
uchar flag_en;
uchar code table_num[]="0123456789abcdefg";
sbit rs=P1^0; //寄存器选择信号 H:数据寄存器 L:指令寄存器
sbit rw=P1^1; //寄存器选择信号 H:数据寄存器 L:指令寄存器
sbit e =P1^2; //片选信号 下降沿触发
sbit pwm = P1^4;
uchar f_pwm_l ; //越小越慢
uchar menu_1; //菜单设计的变量
uint t_high = 300,t_low = 100;
/***********100us的延时函数***12M晶振**************/
void delay_100us(uchar z)
{ //12M
uchar x,y;
for(x=0;x<z;x++)
for(y=0;y<20;y++);
}
sbit hw_P32=P3^2; //红外遥控IO口的定义
bit flag_jiema_en = 0; //红外解码成功标志位
uchar hw_table[4]; //红外解码数据缓冲区
/***********************1ms延时函数*****************************/
void delay_1ms(uint q)
{
uint i,j;
for(i=0;i<q;i++)
for(j=0;j<110;j++);
}
/********************************************************************
* 名称 : delay_uint()
* 功能 : 小延时。
* 输入 : 无
* 输出 : 无
***********************************************************************/
void delay_uint(uint q)
{
while(q--);
}
/********************************************************************
* 名称 : write_com(uchar com)
* 功能 : 1602命令函数
* 输入 : 输入的命令值
* 输出 : 无
***********************************************************************/
void write_com(uchar com)
{
e=0;
rs=0;
rw=0;
P0=com;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
/********************************************************************
* 名称 : write_data(uchar dat)
* 功能 : 1602写数据函数
* 输入 : 需要写入1602的数据
* 输出 : 无
***********************************************************************/
void write_data(uchar dat)
{
e=0;
rs=1;
rw=0;
P0=dat;
delay_uint(25);
e=1;
delay_uint(100);
e=0;
}
/********************************************************************
* 名称 : write_string(uchar hang,uchar add,uchar *p)
* 功能 : 改变液晶中某位的值,如果要让第一行,第五个字符开始显示"ab cd ef" ,调用该函数如下
write_string(1,5,"ab cd ef;")
* 输入 : 行,列,需要输入1602的数据
* 输出 : 无
***********************************************************************/
void write_string(uchar hang,uchar add,uchar *p)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
while(1)
{
if(*p == '\0') break;
write_data(*p);
p++;
}
}
/***********************lcd1602上显示特定的字符************************/
void write_zifu(uchar hang,uchar add,uchar date)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
write_data(date);
}
/***********************lcd1602上显示两位十进制数************************/
void write_sfm3_18B20(uchar hang,uchar add,uint date)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
write_data(0x30+date/100%10);
write_data(0x30+date/10%10);
write_data('.');
write_data(0x30+date%10);
}
/***********************lcd1602上显示两位十进制数************************/
void write_sfm2(uchar hang,uchar add,uint date)
{
if(hang==1)
write_com(0x80+add);
else
write_com(0x80+0x40+add);
write_data(0x30+date/10%10);
write_data(0x30+date%10);
}
/***********************lcd1602初始化设置************************/
void init_1602()
{
write_com(0x38); //
write_com(0x0c);
write_com(0x06);
delay_uint(1000);
write_string(1,0," temp: . ");
write_string(2,0,"H: . L: . ");
write_zifu(1,12,0xdf); //显示度
write_zifu(2,6, 0xdf); //显示度
write_zifu(2,14,0xdf); //显示度
}
/***********************18b20初始化函数*****************************/
void init_18b20()
{
bit q;
dq = 1; //把总线拿高
delay_uint(1); //15us
dq = 0; //给复位脉冲
delay_uint(80); //750us
dq = 1; //把总线拿高 等待
delay_uint(10); //110us
q = dq; //读取18b20初始化信号
delay_uint(20); //200us
dq = 1; //把总线拿高 释放总线
}
/*************写18b20内的数据***************/
void write_18b20(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{ //写数据是低位开始
dq = 0; //把总线拿低写时间隙开始
dq = dat & 0x01; //向18b20总线写数据了
delay_uint(5); // 60us
dq = 1; //释放总线
dat >>= 1;
}
}
/*************读取18b20内的数据***************/
uchar read_18b20()
{
uchar i,value;
for(i=0;i<8;i++)
{
dq = 0; //把总线拿低读时间隙开始
value >>= 1; //读数据是低位开始
dq = 1; //释放总线
if(dq == 1) //开始读写数据
value |= 0x80;
delay_uint(5); //60us 读一个时间隙最少要保持60us的时间
}
return value; //返回数据
}
/*************读取温度的值 读出来的是小数***************/
uint read_temp()
{
uint value;
uchar low; //在读取温度的时候如果中断的太频繁了,就应该把中断给关了,否则会影响到18b20的时序
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0x44); //启动一次温度转换命令
delay_uint(50); //500us
init_18b20(); //初始化18b20
write_18b20(0xcc); //跳过64位ROM
write_18b20(0xbe); //发出读取暂存器命令
low = read_18b20(); //读温度低字节
value = read_18b20(); //读温度高字节
value <<= 8; //把温度的高位左移8位
value |= low; //把读出的温度低位放到value的低八位中
value *= 0.625; //转换到温度值 小数
return value; //返回读出的温度 带小数
}
/*************定时器0初始化程序***************/
void time_init()
{
EA = 1; //开总中断
TMOD = 0X11; //定时器0、定时器1工作方式1
ET0 = 1; //开定时器0中断
TR0 = 1; //允许定时器0定时
ET1 = 1; //开定时器0中断
TR1 = 0; //允许定时器0定时
}
/********************独立按键程序*****************/
uchar key_can; //按键值
void key() //独立按键程序
{
static uchar key_new;
key_can = 20; //按键值还原
P3 |= 0xf0;
if(key_500ms == 1) //连加
{
key_500ms = 0;
key_new = 1;
}
if((P3 & 0xf0) != 0xf0) //按键按下
{
delay_1ms(1); //按键消抖动
if(((P3 & 0xf0) != 0xf0) && (key_new == 1))
{ //确认是按键按下
key_new = 0;
switch(P3 & 0xf0)
{
case 0xc0: key_can = 1; break; //得到k1键值
case 0xa0: key_can = 2; break; //得到K2键值
case 0x80: key_can = 3; break; //得到k3键值
}
}
}
else
{
if(key_new == 0)
{
key_new = 1;
flag_lj_en = 0; //关闭连加使能
flag_lj_3_en = 0; //关闭3秒后使能
key_value = 0; //清零
key_time = 0;
}
}
}
/****************按键显示函数***************/
void key_with()
{
if(key_can == 1) //设置键
{
menu_1 ++;
if(menu_1 >= 3)
{
menu_1 = 0;
}
if(menu_1 == 0)
{
write_com(0x0c); //关闭光标
}
}
if(menu_1 == 1) //设置高温
{
if(key_can == 2)
{
if(flag_lj_3_en == 0)
t_high ++ ; //按键按下未松开自动加三次
else
t_high += 10; //按键按下未松开自动加三次之后每次自动加10
if(t_high > 990)
t_high = 990;
}
if(key_can == 3)
{
if(flag_lj_3_en == 0)
t_high -- ; //按键按下未松开自动减三次
else
t_high -= 10; //按键按下未松开自动减三次之后每次自动减10
if(t_high <= t_low)
t_high = t_low + 1;
}
write_sfm3_18B20(2,2,t_high);
write_com(0x80+0x40+2); //将光标移动到秒个位
write_com(0x0f); //显示光标并且闪烁
}
if(menu_1 == 2) //设置低温
{
if(key_can == 2)
{
if(flag_lj_3_en == 0)
t_low ++ ; //按键按下未松开自动加三次
else
t_low += 10; //按键按下未松开自动加三次之后每次自动加10
if(t_low >= t_high)
t_low = t_high - 1;
}
if(key_can == 3)
{
if(flag_lj_3_en == 0)
t_low -- ; //按键按下未松开自动减三次
else
t_low -= 10; //按键按下未松开自动加三次之后每次自动加10
if(t_low <= 10)
t_low = 10;
}
write_sfm3_18B20(2,10,t_low);
write_com(0x80+0x40+10); //将光标移动到秒个位
write_com(0x0f); //显示光标并且闪烁
}
}
/****************风扇控制函数***************/
void fengshan_kz()
{
if(flag_en == 1)
{
if(temperature >= t_high) //风扇全开
{
TR1 = 1;
pwm = 0;
}
else if((temperature < t_high) && (temperature >= t_low)) //风扇缓慢
{
f_pwm_l = 65;
TR1 = 1;
}
else if(temperature < t_low) //关闭风扇
{
TR1 = 0;
pwm = 1;
}
}else //关闭风扇
{
TR1 = 0;
pwm = 1;
}
}
/***********外部中断0初始化程序****************/
void init_int0() //外部中断0初始化程序
{
EX0=1; //允许外部中断0中断
EA=1; //开总中断
IT0 = 1; //外部中断0负跳变中断
}
/***********红外遥控程序**************/
void hongwai_dis()
{
if(flag_jiema_en == 1)
{
flag_jiema_en = 0;
if(hw_table[2] == 0x09) //设置键
{
key_can = 1;
}
if(hw_table[2] == 0x15) //加键
{
key_can = 2;
}
if(hw_table[2] == 0x07) //减键
{
key_can = 3;
}
hw_table[2] = 0; //把数据清零
}
}
/****************主函数***************/
void main()
{
static uchar value;
init_1602(); //1602初始化
time_init(); //初始化定时器
init_int0() ; //外部中断0初始化程序
while(1)
{
if(flag_200ms == 1) //300ms 处理一次温度程序
{
flag_200ms = 0;
value ++;
if(value >= 4)
{
value = 0;
if(miao != 0)
{
miao --; //时间减1
}
if(miao == 0)
flag_en = 0;
}
if(hw == 1) //感应到人
{
miao = 30;
write_string(1,14,"Y ");
flag_en = 1;
}
else
write_string(1,14,"N ");
write_sfm2(1,0,miao);
temperature = read_temp(); //先读出温度的值
fengshan_kz(); //风扇控制函数
write_sfm3_18B20(1,8,temperature);
}
key(); //按键程序
hongwai_dis(); //红外遥控程序
if(key_can < 10)
{
key_with(); //设置报警温度
}
}
}
/**********************红外解码中断程序***********************/
void int0() interrupt 0
{
unsigned char i,j;
delay_100us(20); //防止干扰
if(hw_P32 == 0)
{ //引导码
while(hw_P32 == 0); //等待低电平过完
delay_100us(20);
if(hw_P32 == 1) //引码结束
{
delay_100us(20); // 说明高电平已经过完 引导码已经结束
for(i=0;i<4;i++)
for(j=0;j<8;j++)
{
while(hw_P32 == 0); //等待过完
delay_100us(5);
if(hw_P32 == 0) //数据0的时间
{ //数据1的时间
hw_table[i] >>= 1; //低位在前
}
else
{
delay_100us(5); // 高电平的时间过完
hw_table[i] >>= 1; //低位在前
hw_table[i] |= 0x80; //数据值1
}
}
flag_jiema_en = 1; //红外解码成功
}
}
}
/*************定时器0中断服务程序***************/
void time0_int() interrupt 1
{
static uchar value;
TH0 = 0x3c;
TL0 = 0xb0; // 50ms
value ++;
if(value % 4 == 0)
{
flag_200ms = 1; //300ms
value = 0;
}
if(flag_lj_en == 1) //按下按键使能
{
key_time ++;
if(key_time >= 10) //500ms
{
key_time = 0;
key_500ms = 1; //500ms
key_value ++;
if(key_value > 3)
{
key_value = 10;
flag_lj_3_en = 1; //3次后1.5秒连加大些
}
}
}
}
/*******************定时器1用做单片机模拟PWM 调节***********************/
void Timer1() interrupt 3 //调用定时器1
{
static uchar value_l;
TH1=0xfe; //
TL1=0x0c; //500us
if(pwm==1)
{
value_l+=3;
if(value_l > f_pwm_l) //高电平
{
value_l=0;
if(f_pwm_l != 0)
pwm=0;
}
}
else
{
value_l+=3;
if(value_l > 100 - f_pwm_l) //低电平
{
value_l=0;
pwm=1;
}
}
}
四、结论
本系统以STC89C52单片机为核心,单片机主要完成对外界环境温湿度信号的采集、处理、显示等功能。
运行程序该系统的主要特点是:
(1)适用性强,用户只需对界面参数进行设置并启动系统正常运行便可满足不同用户对最适合温湿度的要求,实现对最适温湿度的实时监控。
(2)随时可以根据软件编写新的功能加入产品。操作界面可扩展性强,只要稍加改变,即可增加其他按键的使用功能。
本系统温度控制采用DS18B20数字温度传感器作为感温元件。可控硅串接在电源与负载电风扇,借改变定周期内可控硅的导通与截止时间之比来实现调速功能,其设计完使用方便就,适应人们睡办公等不同场合的使用。
基于STC89C52单片机所设计与研制的电风扇智能调速系统,造价低且具有稳定性高、性能优越、节约电能等优点,在夜间无需定时,同样能给人们带来更多的方便。
本设计在模拟检测中运行较好,但采样据不太稳定。功能上的缺憾是对于两个档之间的临界温度处理不好,并且档位太少,还有待改进。
在本课题的研究过程中,对单片机和传感器有了一定的了解,对设计智能电风扇有了一个总体的设计思路。其中有很多芯片是我们所没有学过的,但是通过设计中的学习,我查阅了大量的资料,尤其是到图书馆去询问老师,通过在校园网的网站查到了许多对我有很大帮助的资料,并且和同学们一起讨论,使我对这些芯片有了很深刻的了解,并学会将其运用在具体的实践当中。但是在很都方面还有待于进一一步的改进和完善。在以后的工作与学习中,需要更加努力的学习理论知识,在本身掌握知识的基础上还要看大量的书籍,还有要提高实践能力,才能对这些专业的知识做进一步的学习和研究。
目录
目 录
摘要 I
Abstract II
第1章 绪 论 1
第1节 智能遥控感应风扇的背景 1
第2节 智能遥控感应风扇的内容 1
第3节 智能遥控感应风扇的创新点 2
第2章 智能遥控感应风扇设计过程 3
第1节 风扇硬件设计 5
第2节 风扇软件设计 9
第3章 智能遥控感应风扇的功能与测试结果 14
第1节 智能遥控感应风扇的功能 14
第2节 智能遥控感应风扇功能测试结果 15
结 论 18
参考文献 19
致 谢 20
附 录 21















 2584
2584











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









