







Yolo11x 海胆检测器
一、模型详情/概述
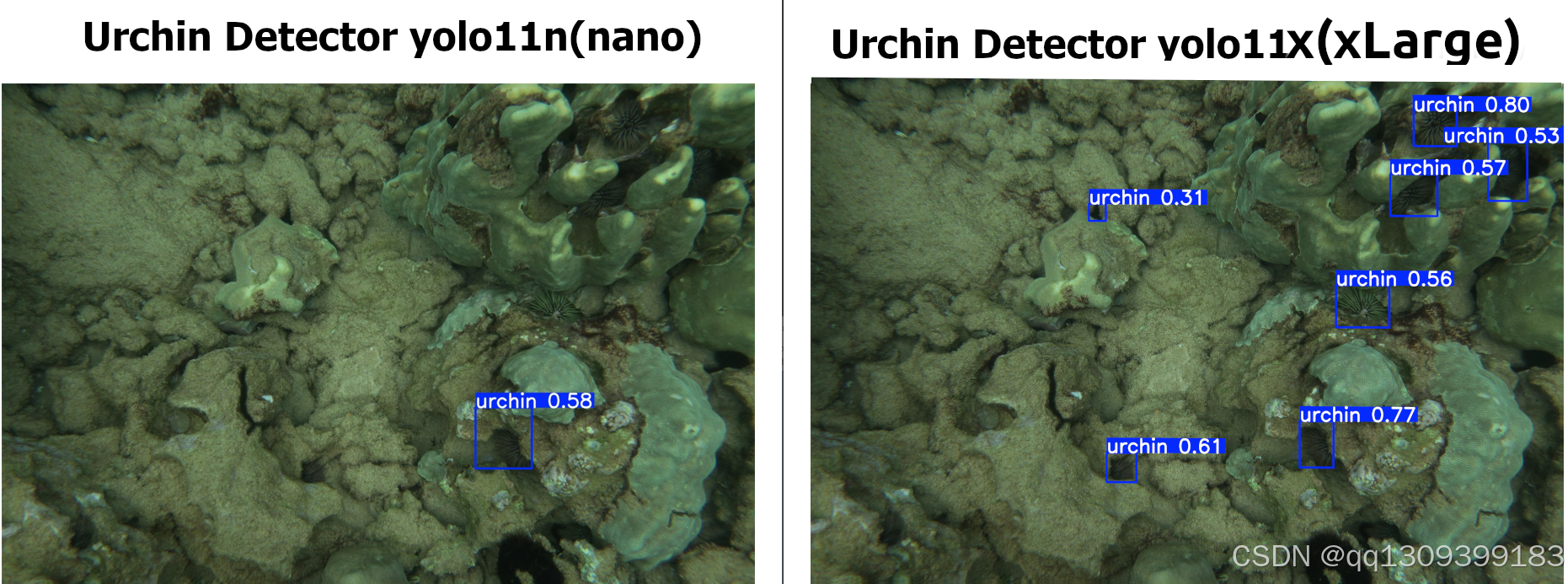
本模型基于YOLO11x架构训练,用于检测各类水下环境中的海胆。通过数据集训练,可在不同水下条件下精确定位海胆目标。
▌核心参数
- 模型架构:YOLO11x
- 任务类型:目标检测(海胆识别)
- 影像类型:水下视频
- 检测类别:单类别(海胆)
- 模型下载:
yolo11x_urchin_trained
二、模型部署
1. 权重文件
支持多种格式:
- PyTorch格式 (
best.pt):原生PyTorch应用标准格式
2. 应用场景
- 水下视频实时检测
- 水下影像后处理分析
三、技术特性
1. 性能优势
- 多源数据集:包含多角度海胆图像
- 轻量架构:YOLO11x专为水下实时检测优化
- 数据划分:70%训练集 / 20%验证集 / 10%测试集
- 训练参数:
- 训练轮次:100
- 学习率:0.001
- 图像分辨率:640×640
2. 训练数据源
- Orange-OpenSource Marine-Detect
- Roboflow项目:
- Sakana Urchins CJLib
- Diad 3 Computer Vision Project
▌数据集规范
| 属性 | 说明 |
|---|---|
| 许可协议 | CC BY 4.0 |
| 图像总量 | 5000张 |
| 数据划分 | 7:2:1(训练/验证/测试) |
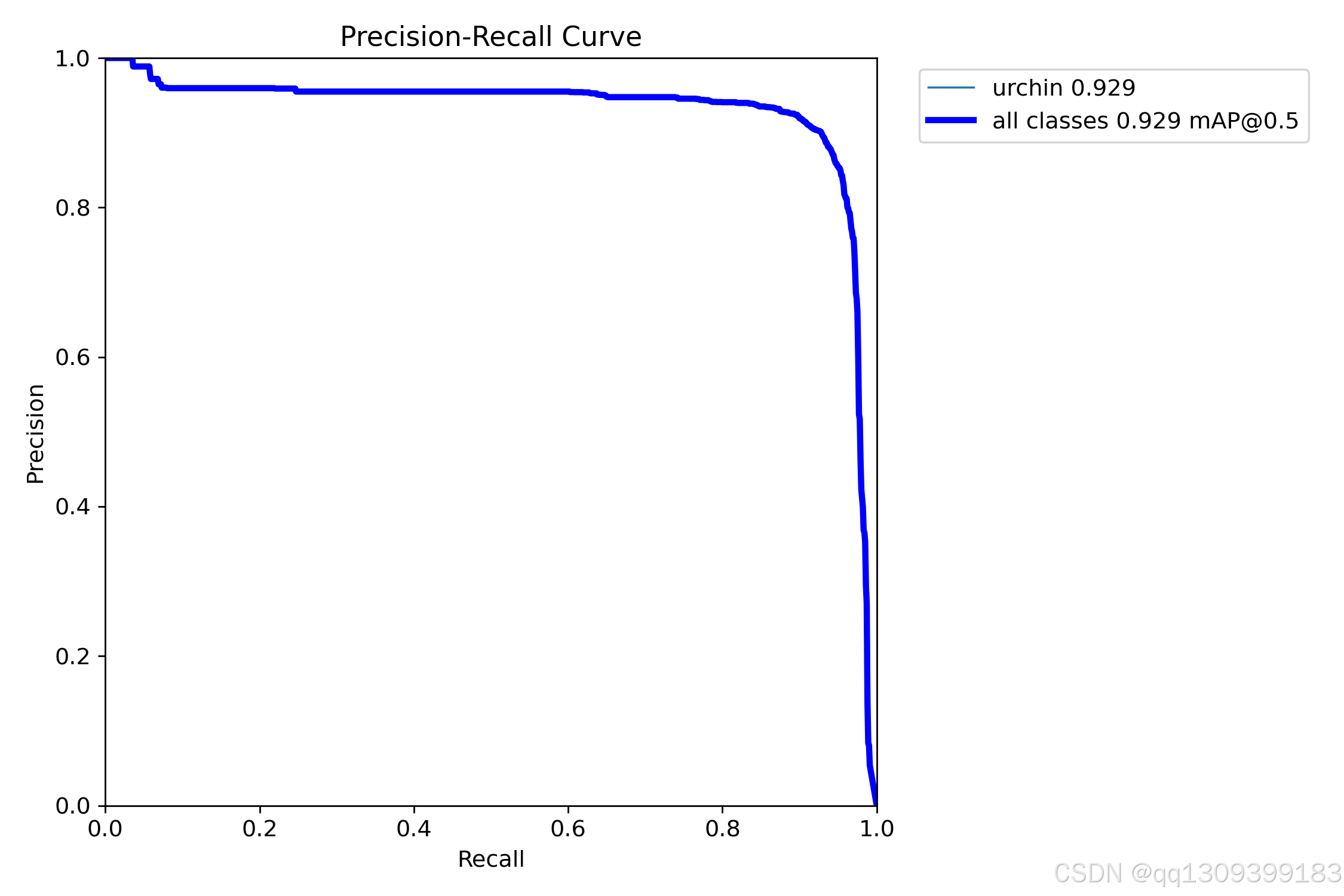
四、性能指标
验证集评估结果:
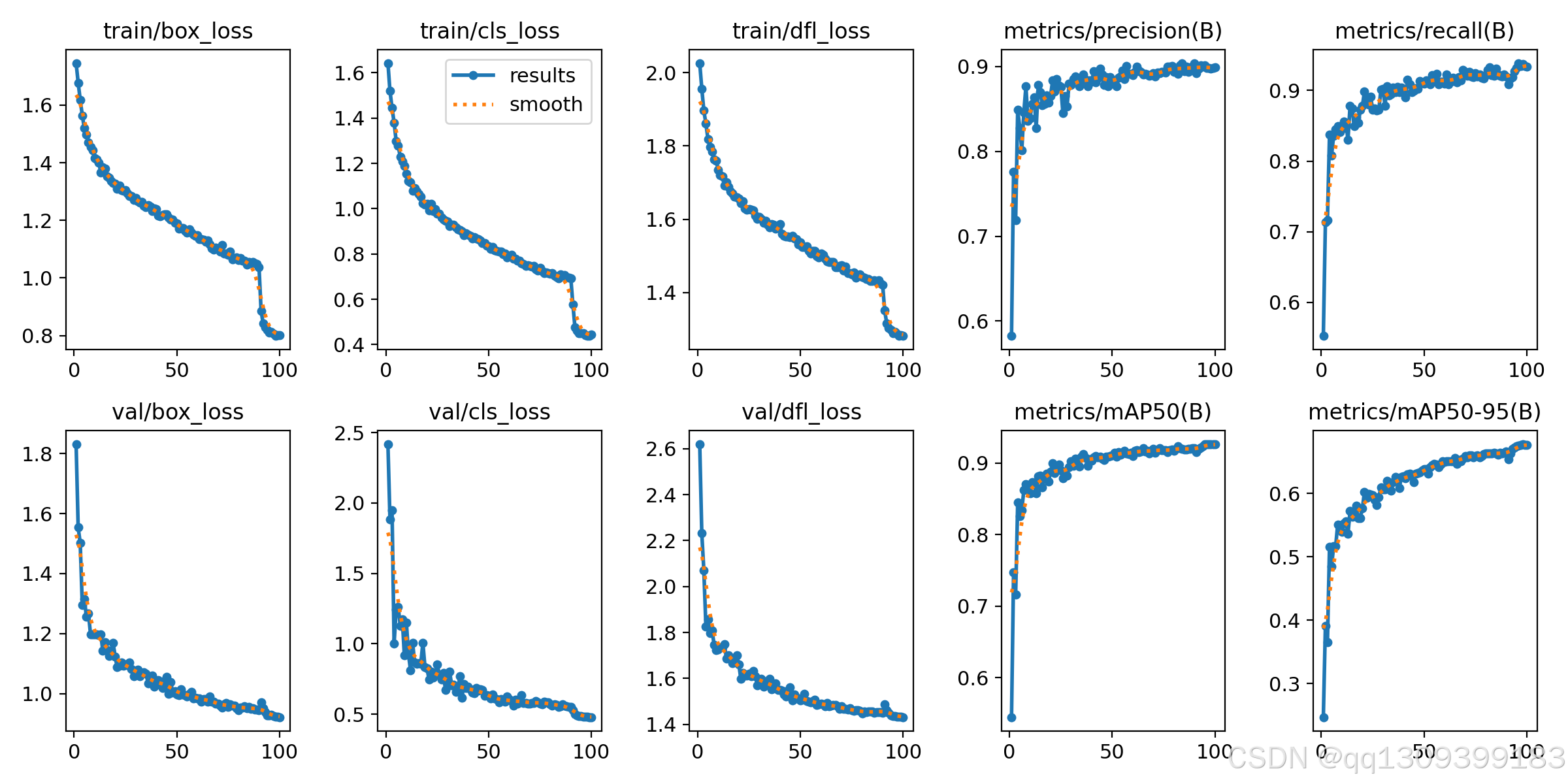
▌训练验证曲线
- 训练损失 vs 验证损失曲线
(注:此处保留原始技术术语如"YOLO11x",采用Markdown三级标题结构,关键数据使用表格呈现,重要参数加粗显示,符合中文技术文档规范)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









