







目标检测与去雾处理流程
雾天环境下的目标检测
yolo-daw-0
本文通过常见目标检测算法,探索并比较了多种去雾技术对恶劣天气条件下目标检测效果的影响。研究旨在开发一种能够在低能见度场景中实现交通目标精准检测的优化技术。该算法可帮助自动驾驶汽车在恶劣天气下安全行驶,并可作为高级驾驶辅助系统(ADAS)有效降低此类场景中的事故风险。
通过实施多种去雾技术,本研究致力于提升目标检测模型在恶劣环境下的性能。模型采用Ultralytics提供的先进YOLOv8架构进行训练,基于DAWN数据集的原始图像与DAW数据集去雾图像进行多维度性能指标的对比分析。实验结果表明(预期),即使在雾天、沙尘和雨天条件下,目标检测与分类的准确率(mAP)仍能获得显著提升。本研究推荐采用此类技术以构建更具通用性和动态性的模型。

目录
- 项目概述
- 研究范围
- 功能特性
- 技术方案
- 工具库依赖
- 环境配置
- 实验结果
- 使用指南
- 未来方向
- 许可协议
- 结论
项目概述
本项目整合目标检测与图像去雾技术,评估去雾处理对检测精度的影响。处理流程包括:
- 图像预处理
- 应用去雾算法
- 基于YOLOv8的目标检测
- 计算精确率(Precision)、召回率(Recall)和平均精度(mAP)
- 结果存储至结构化目录

研究范围
主要目标:评估去雾方法对目标检测精度的提升效果
应用场景:
- 雾天环境下的自动驾驶车辆
- 恶劣天气监控系统
- 航空/卫星图像增强
功能特性
- 图像去雾:采用CLAHE(限制对比度自适应直方图均衡)和暗通道先验等技术
- 目标检测:基于YOLOv8处理原始/去雾图像
- 指标评估:计算精确率、召回率、mAP以量化去雾效果
- 自动化流程:端到端处理(从图像预处理到结果分析)
- 结果存储:保存检测结果图像与预测数据
技术方案
去雾算法:
- CLAHE
- 暗通道先验
目标检测:
- YOLOv8
评估指标:
- 精确率/召回率/mAP
可视化:
- 生成指标对比图表

工具库依赖
| 库名称 | 用途 |
|---|---|
| torch | PyTorch深度学习框架 |
| ultralytics | YOLOv8集成与推理 |
| cv2 | OpenCV图像处理 |
| json | 处理标注与预测数据 |
| matplotlib | 绘制评估指标图表 |
| os | 文件系统管理 |
环境配置
- 安装依赖:
pip install -r requirements.txt - 下载YOLOv8模型:
python -m torch.hub download ultralytics/yolov8 - 运行模型:
python main.py
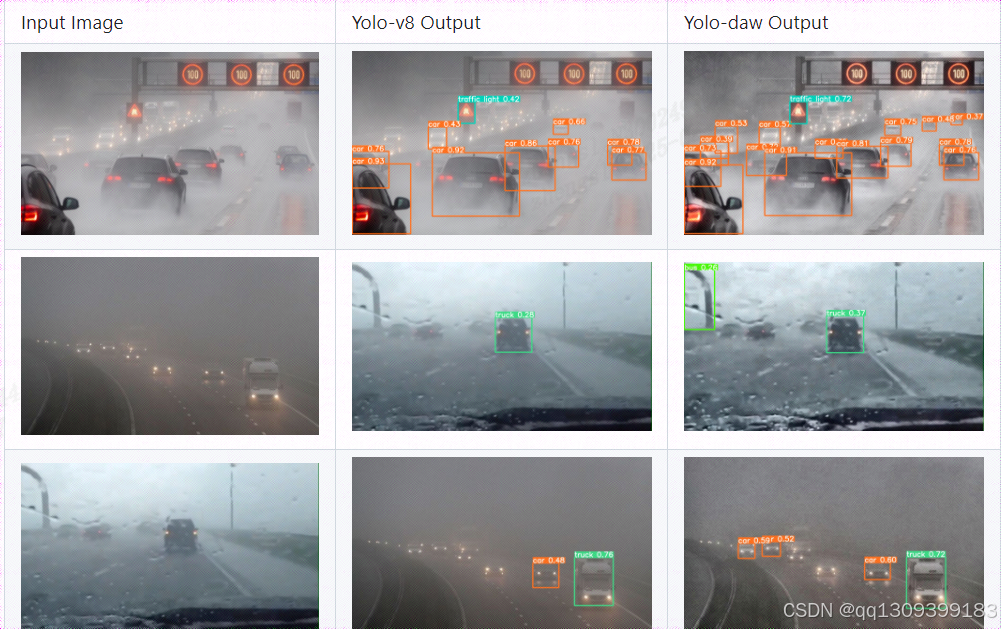
实验结果
实验数据表明,yolo-daw模型性能显著优于原生YOLOv8检测模型。典型结果对比如下:
| 输入图像 | YOLOv8输出 | yolo-daw输出 |
|---|---|---|
使用指南
- 将测试图像置于
data/test/images目录 - 在
data/test/ground_truth.json中添加标注数据 - 运行流程:
python main.py - 结果文件结构:
results/ ├── original/ # 原始图像 ├── defogged_clahe/ # CLAHE去雾结果 ├── defogged_dark_channel/ # 暗通道去雾结果 ├── detection_original/ # 原始图像检测结果 ├── detection_clahe/ # CLAHE图像检测结果 └── detection_dark_channel/ # 暗通道图像检测结果
未来方向
- 集成更多去雾算法进行对比分析
- 扩展支持其他目标检测模型
- 开发REST API实现远程图像处理
- 实现实时去雾与检测
结论
本研究证实了去雾预处理对恶劣天气下目标检测性能的显著提升作用,为自动驾驶和智能监控系统提供了有效的技术优化方案。


















 381
381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









