







**单片机设计介绍,基于单片机智能超声波避障红外寻迹小车控制系统
一 概要
基于单片机智能超声波避障红外寻迹小车控制系统概要
一、系统简介
本系统是一款基于单片机的智能小车控制系统,具备红外寻迹与超声波避障两大核心功能。该系统通过红外传感器实现寻迹功能,使小车能够沿着预设的黑线行驶;同时,利用超声波传感器检测并避开障碍物,确保小车安全行驶。
二、系统组成
单片机:作为整个系统的“大脑”,负责接收传感器信号,处理数据并发出控制指令。
红外寻迹模块:包含红外发射和接收二极管,用于检测地面上的黑线,实现小车的寻迹功能。
超声波避障模块:通过发射和接收超声波来检测前方障碍物,为小车提供避障信息。
电机驱动模块:根据单片机的控制指令,驱动小车前进、后退、左转或右转。
电源系统:为整个系统提供稳定可靠的电力支持。
三、工作原理
红外寻迹:红外传感器发射红外线并接收反射光,通过判断反射光的强度来确定是否检测到黑线。当检测到黑线时,单片机会根据预设算法调整小车的行驶方向。
超声波避障:超声波传感器发射超声波并接收其回波,通过测量回波时间计算出与障碍物的距离。当距离小于安全阈值时,单片机会控制小车进行避障操作。
四、软件设计
初始化程序:对单片机、传感器和电机进行初始化设置。
寻迹算法:根据红外传感器的信号判断小车当前位置与黑线的相对关系,并调整行驶方向。
避障算法:利用超声波传感器检测障碍物距离,并根据距离值决定小车的避障行为。
主控制程序:协调寻迹与避障功能,确保小车在复杂环境中稳定运行。
五、系统特点与优势
智能化程度高:能够自主进行寻迹和避障操作,减少人工干预。
适应性强:可在不同环境下进行路径规划和障碍物规避。
扩展性好:可根据需求添加其他传感器和功能模块,如温度、湿度检测等。
成本效益高:基于单片机的设计降低了系统成本,同时提高了性价比。
六、应用前景
该系统可应用于教学实验、科研测试以及智能玩具等领域。随着技术的不断发展,该系统有望在未来实现更高级别的自动化和智能化功能。
二、功能设计
本设计是基于单片机的避障小车及自动循迹的设计,主要实现以下功能:
可实现通过超声波距离传感器测得障碍物距离
可实现通过红外对管自动循迹
可实现通过温度传感器测得车内温度
可实现自动避障、自动循迹等功能
可实现通过LCD1602显示当前检测到的障碍物距离、车内温度数值以及左右偏差值
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。
三、 软件设计
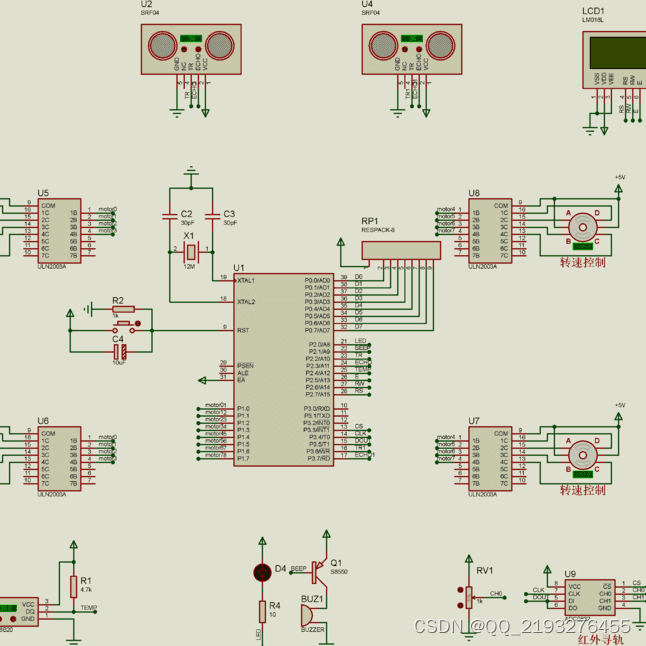
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图
五、 程序
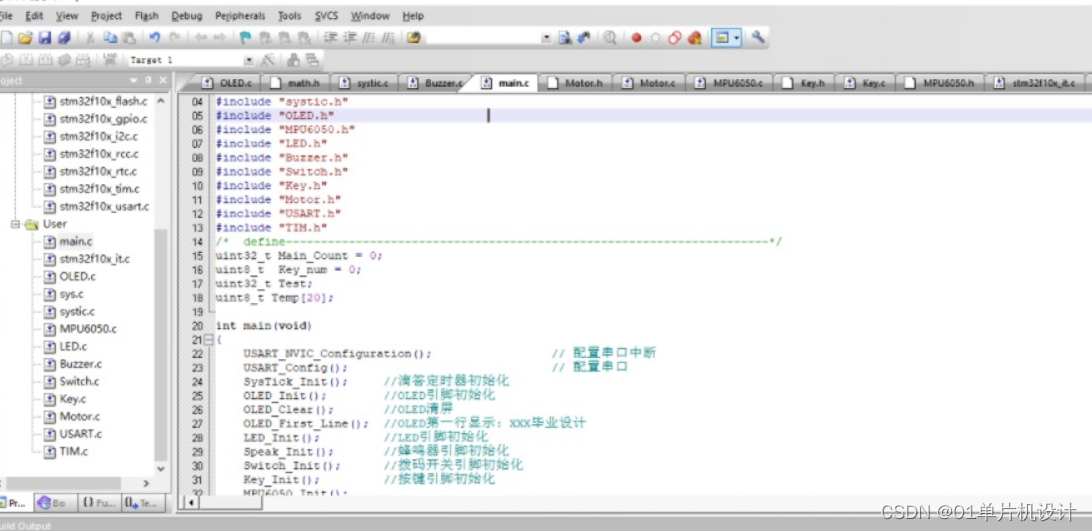
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









