







Value funtion methods-为什么我们用回了Q函数?
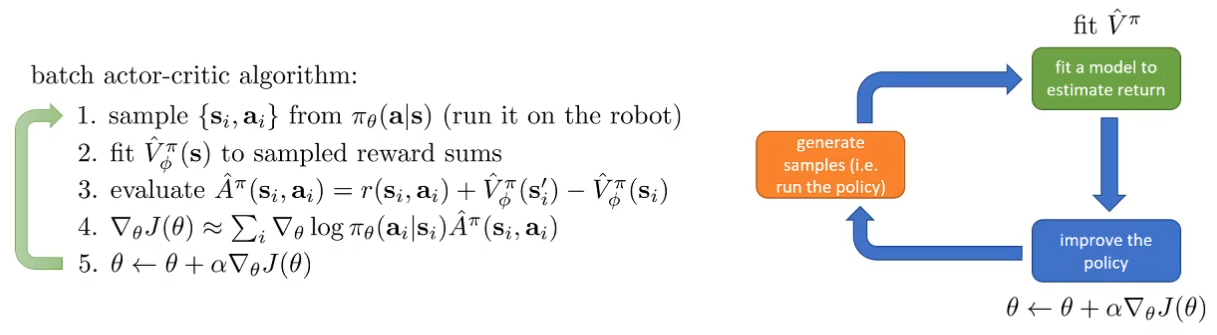
先回顾一下在AC中的基于V函数的框架:
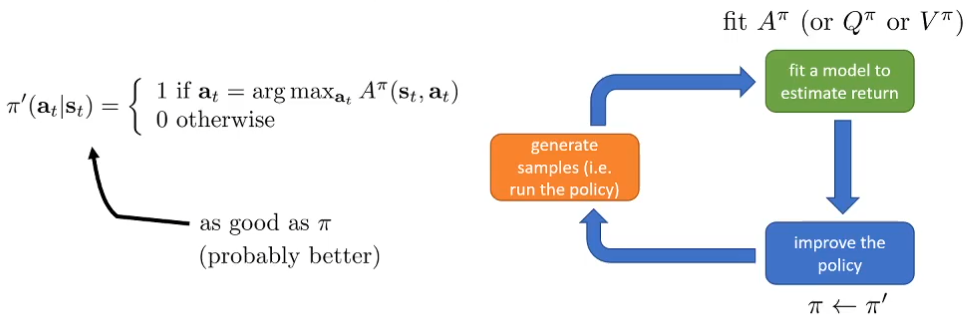
另一个想法:不依赖梯度,而是直接根据值函数去决定动作:V函数已经告诉了我们哪些状态更好
[!NOTE] 思路:
A π ( s t , a t ) A^\pi(s_t,a_t) Aπ(st,at)意义是动作 a t a_t at比根据策略 π \pi π产生的平均动作reward好多少:Advantage
arg max a t A π ( s t , a t ) \arg\max_{a_t}A^\pi(s_t,a_t) argmaxatAπ(st,at)表示从状态 s t s_t st出发,按照策略 π \pi π能够采取的最好的动作——我们可以忘掉显式的策略,只用价值去决定动作(想想AC中,我们还有一个神经网络去专门拟合S到a的策略,输出a的分布)
因此,不管策略有多差,总是能够不断选择改善的,这就是Value function methods的基础
Q-iteration
一个简单的Q-Learning,其实在背后的数学来历如此的深刻。——7.11
根据上面的更新规则,实际上
π
(
s
)
=
a
\pi(s)=a
π(s)=a是一个固定的策略:总是选择最大收益的动作,因此,V函数可以被简化:
V
π
(
s
)
←
r
(
s
,
π
(
s
)
)
+
γ
E
s
′
∼
P
(
s
′
∣
s
,
π
(
s
)
)
[
V
π
(
s
′
)
]
V^\pi(s)\leftarrow r(s,\pi(s))+\gamma E_{s'\sim P(s'|s,\pi(s))}[V^\pi(s')]
Vπ(s)←r(s,π(s))+γEs′∼P(s′∣s,π(s))[Vπ(s′)]
在实际代码中,就是一个存储
V
π
(
s
)
V^\pi(s)
Vπ(s)的表格,不断迭代,整个过程不需要显式的策略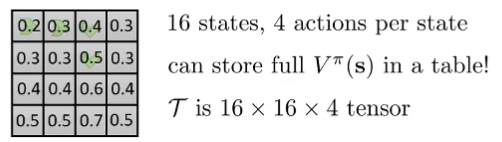
因为
arg
max
a
t
A
π
(
s
t
,
a
t
)
\arg\max_{a_t}A^\pi(s_t,a_t)
argmaxatAπ(st,at)是寻找最大值的
a
t
a_t
at,而
A
π
(
s
,
a
)
A^\pi(s,a)
Aπ(s,a):
A
π
(
s
,
a
)
=
r
(
s
,
a
)
+
γ
E
[
V
π
(
s
′
)
]
−
V
π
(
s
)
A^\pi(s,a)=r(s,a)+\gamma E[V^\pi(s')]-V^\pi(s)
Aπ(s,a)=r(s,a)+γE[Vπ(s′)]−Vπ(s)
最后一项和a没关系,可以删掉,而删掉之后,就是Q的定义:
Q
π
(
s
,
a
)
=
r
(
s
,
a
)
+
γ
E
[
V
π
(
s
′
)
]
Q^\pi(s,a)=r(s,a)+\gamma E[V^\pi(s')]
Qπ(s,a)=r(s,a)+γE[Vπ(s′)]
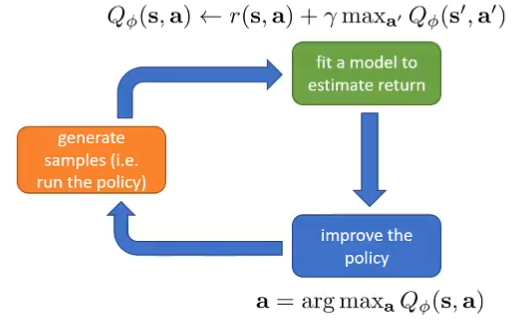
因此我们利用新的Q表格与更新方法:
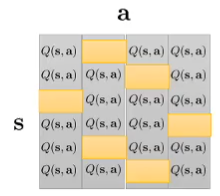
每次寻找每一行的最大值对应的a,其实也就是
arg
max
a
t
A
π
(
s
,
a
)
\arg\max_{a_t}A^\pi(s,a)
argmaxatAπ(s,a)作为动作,而这个最大值就是V函数。V函数的期望又可以用Q函数的最值来近似,下面是Q迭代的方法:
- set Q ( s , a ) ← r ( s , a ) + γ E [ V ( s ′ ) ] Q(s,a)\leftarrow r(s,a)+\gamma E[V(s')] Q(s,a)←r(s,a)+γE[V(s′)]
- set V ( s ) ← max a Q ( s , a ) V(s)\leftarrow \max_a Q(s,a) V(s)←maxaQ(s,a)
[!NOTE] Q-table -> Q-iteration
由于我们这里还是用的Q表格,因此 E [ V ( s ′ ) ] E[V(s')] E[V(s′)]是比较好得到的——对应离散空间
但是,离散的空间维度是 s × s × a s\times s\times a s×s×a,有可能变得非常大,尤其在输入是图像时,因此我们需要借助神经网络去实现策略的更新!
这就是下面这一部分要做的事情(复盘时突然明白了)
试图用神经网络去fit,将会得到:
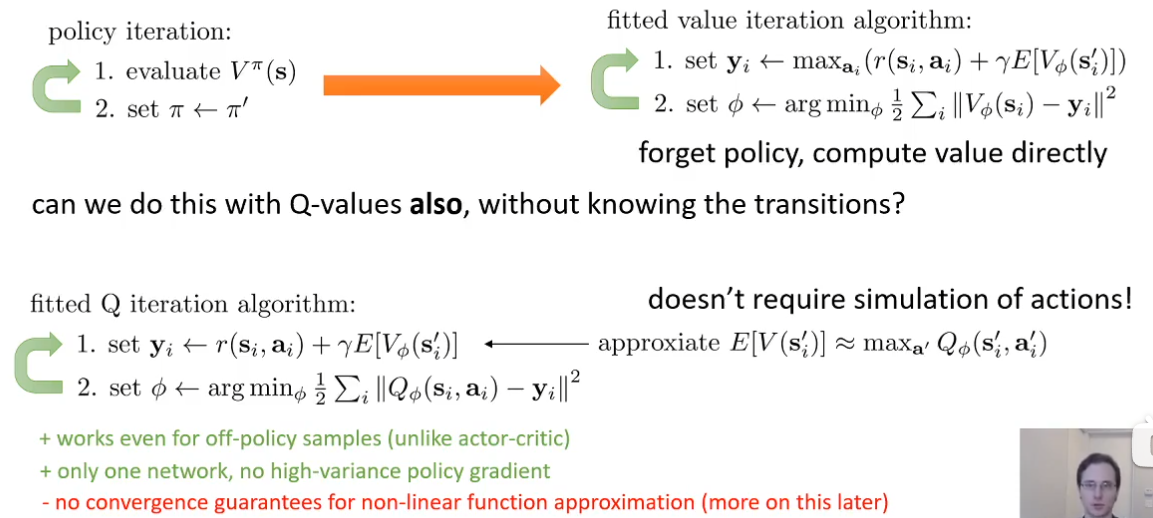
Q-Learning (P30)
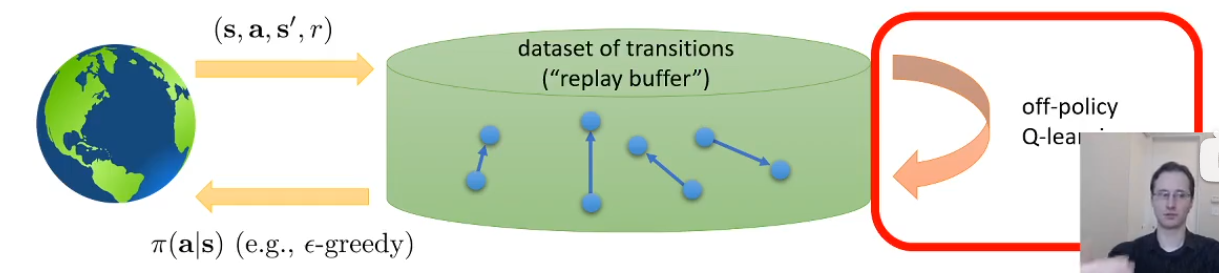
off-policy:Q-iteration不需要从最新的策略去采样,即模型梯度下降了之后仍任可以用之前的数据去训练。成批次的进行采样和训练
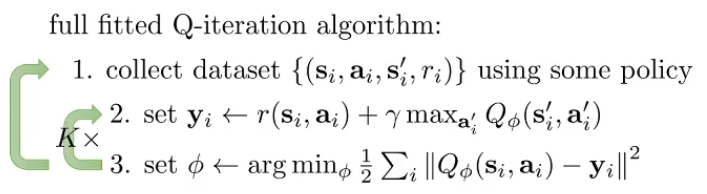
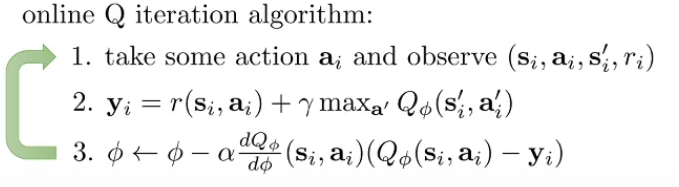
on-policy:Q-Learning
因为没法像off-policy一样一次收集多个数据集,在第三步做一个求和,因此才要换一种梯度更新,但是这并不等同于梯度下降,因为不是求目标的梯度
这一块可以多多讲述off和on的区别,还有包括数据集采样的不同和policy的不同
[!探索]
上面off-policy算法中的第一步“用某种策略去执行动作收集数据集”,是指更新策略并去实际环境中运行,收集一些数据集。而更新策略可以用不同的探索方法
我们需要再原本的on-policy基础上改变一下 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)的更新规则,因为总是选择最好的策略不一定最后最好
- π ( a t ∣ s t ) = 1 − ϵ i f a t = arg max a t Q ϕ ( s t , a t ) \pi(a_t|s_t)=1-\epsilon if a_t=\arg\max_{a_t}Q_\phi(s_t,a_t) π(at∣st)=1−ϵifat=argmaxatQϕ(st,at),有 ϵ \epsilon ϵ的概率去选择别的action
- π ( a t ∣ s t ) ∝ exp ( Q ϕ ( s t , a t ) ) \pi(a_t|s_t)\propto\exp(Q_\phi(s_t,a_t)) π(at∣st)∝exp(Qϕ(st,at)) Boltzmann exploration,优点:已经知道某个action很差,那么大概率不会选它,如果有两个action的value都很高,那么选择他们的概率比较接近。
整个Q-Learning是不需要具体的policy的,policy被隐式的包含在 max a Q \max_aQ maxaQ里面了,但是我们可以通过价值函数去恢复policy















 8308
8308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









