






定时器&PWM应用编程
定时器串口定时点亮LED灯
CubeMX创建工程项目
搭建STM32HAL库环境
使用HAL库建立工程:
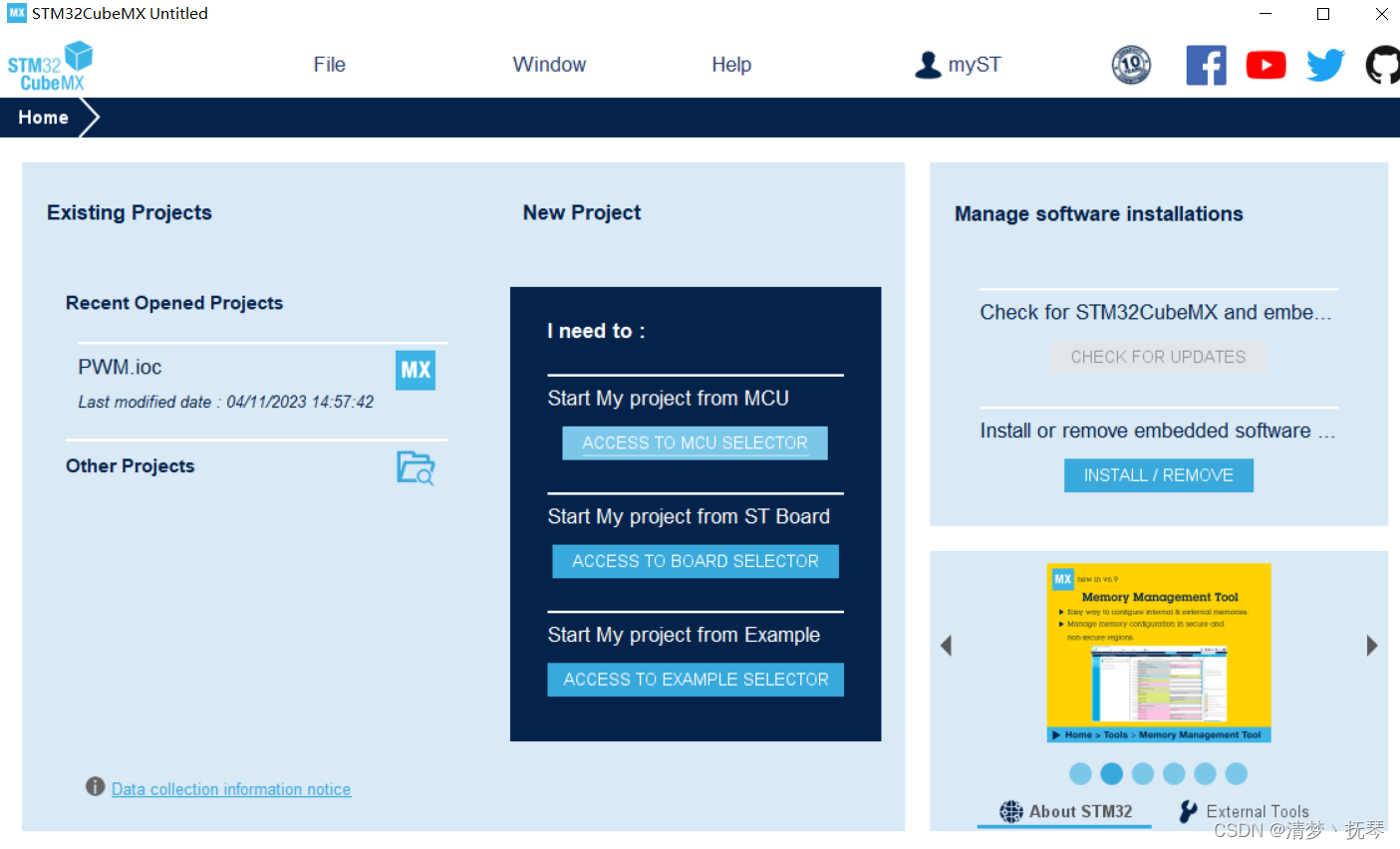
(1)打开STM32CubeMX,在主界面点击:ACCESS TO MCU SELECTOR:
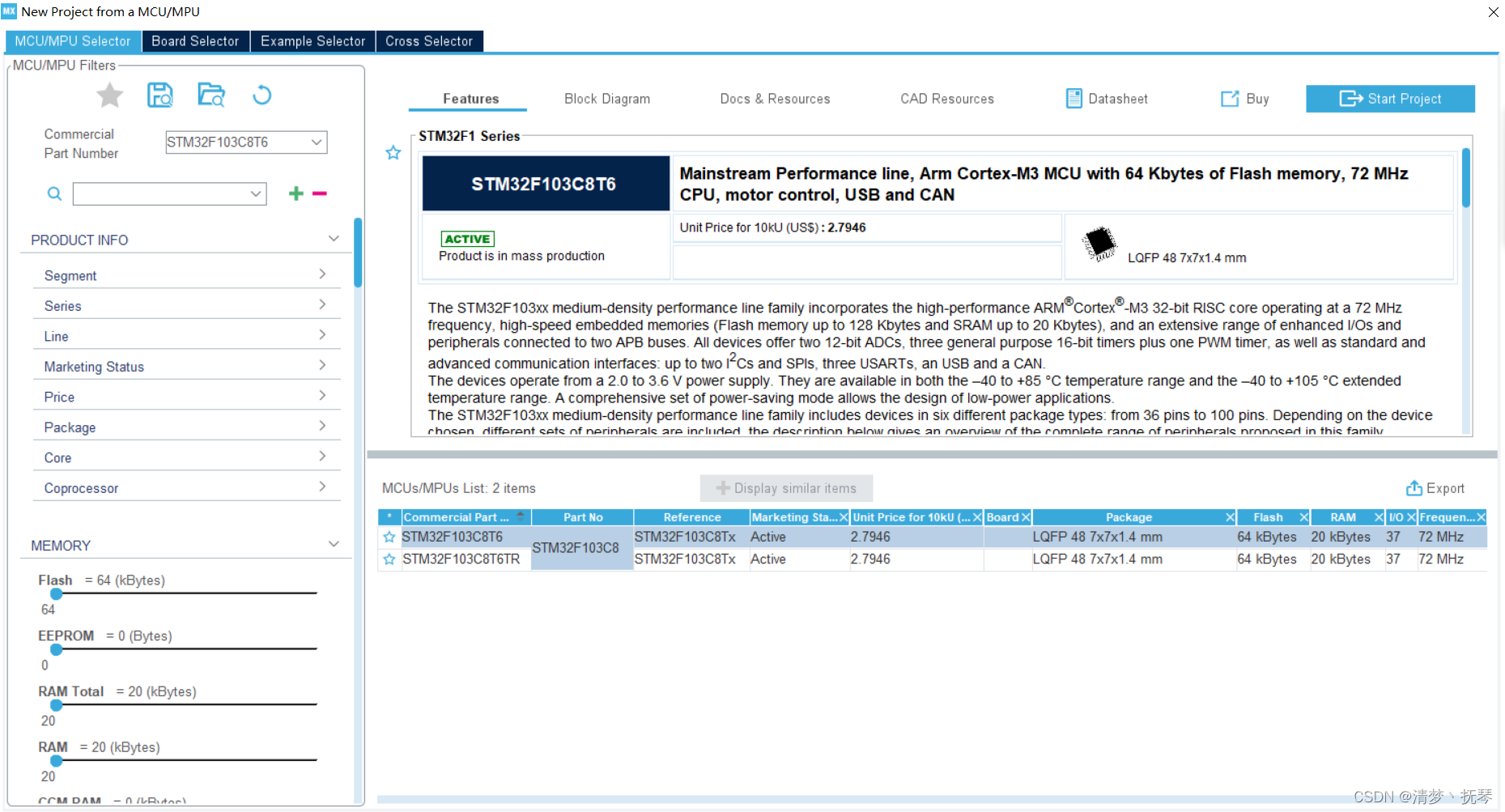
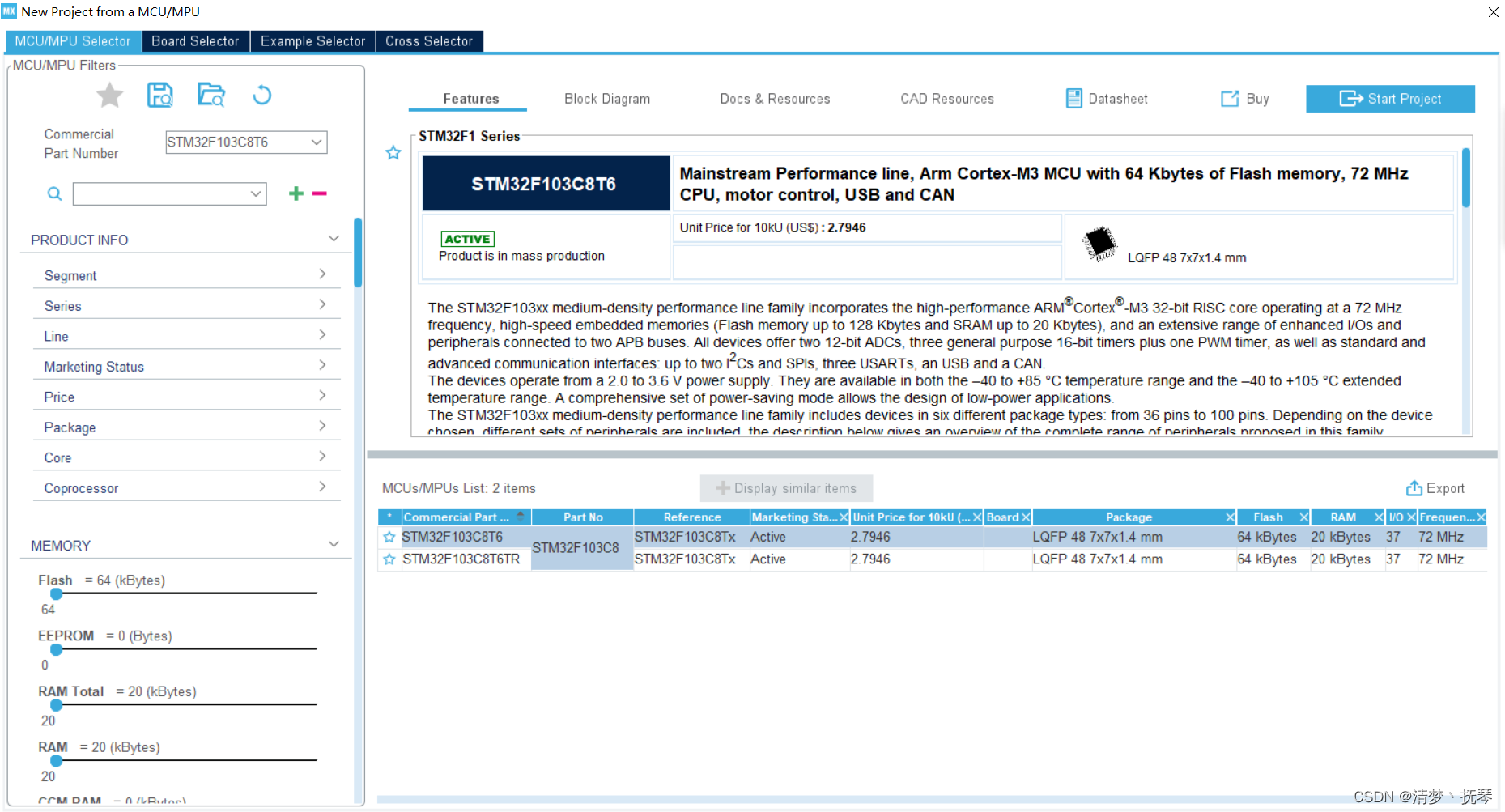
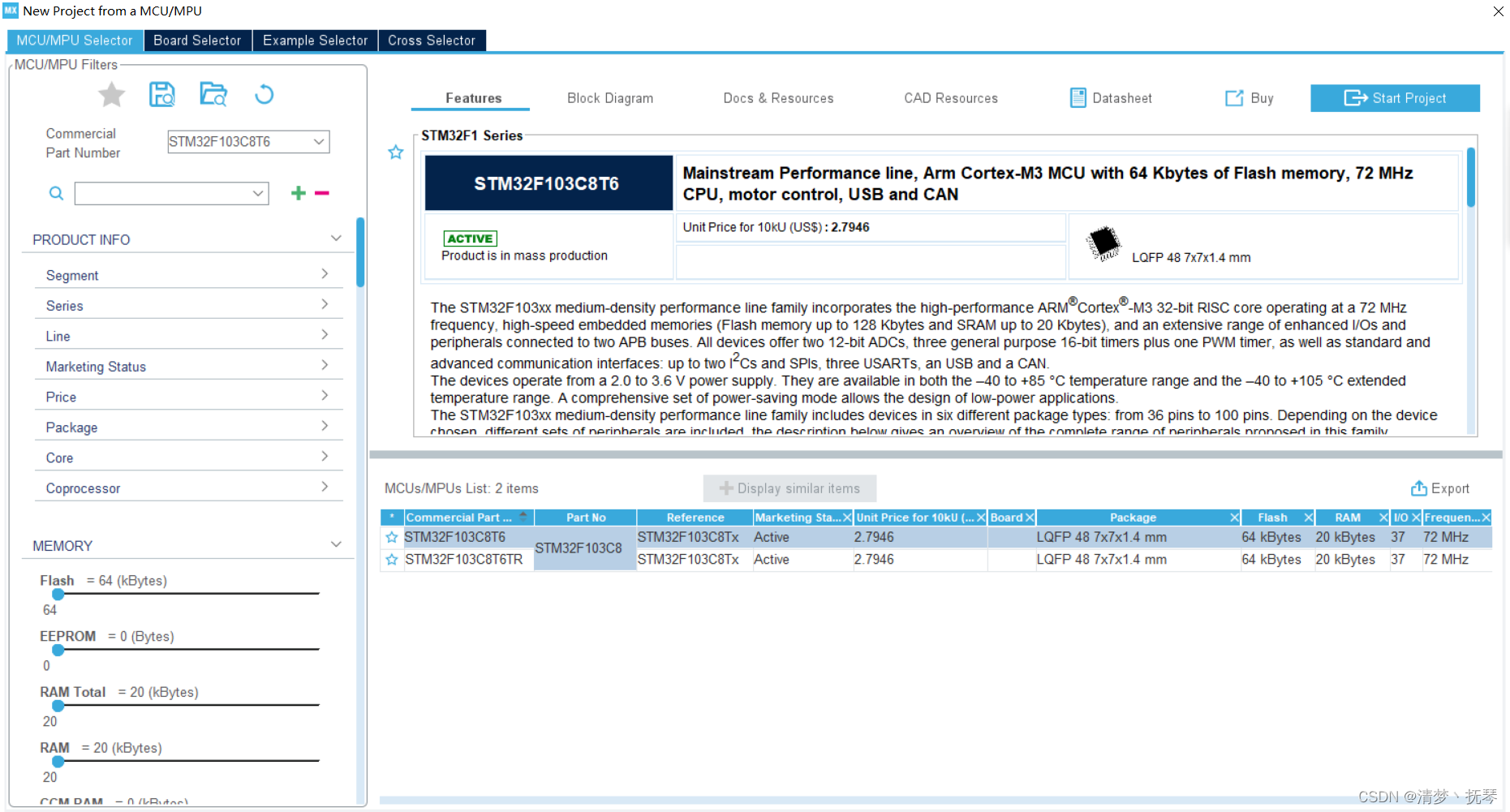
(2)选择的单片机型号以及点击开始工程项目:
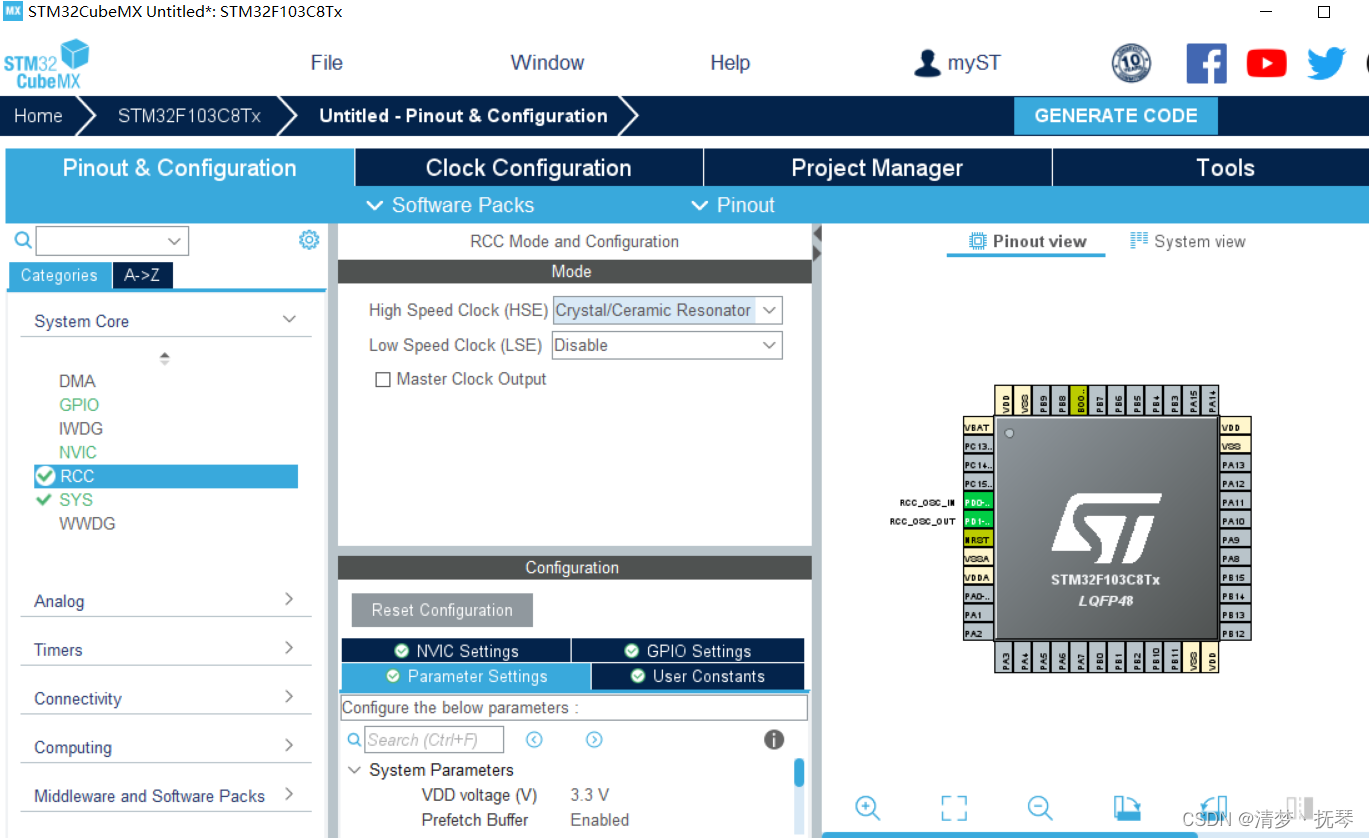
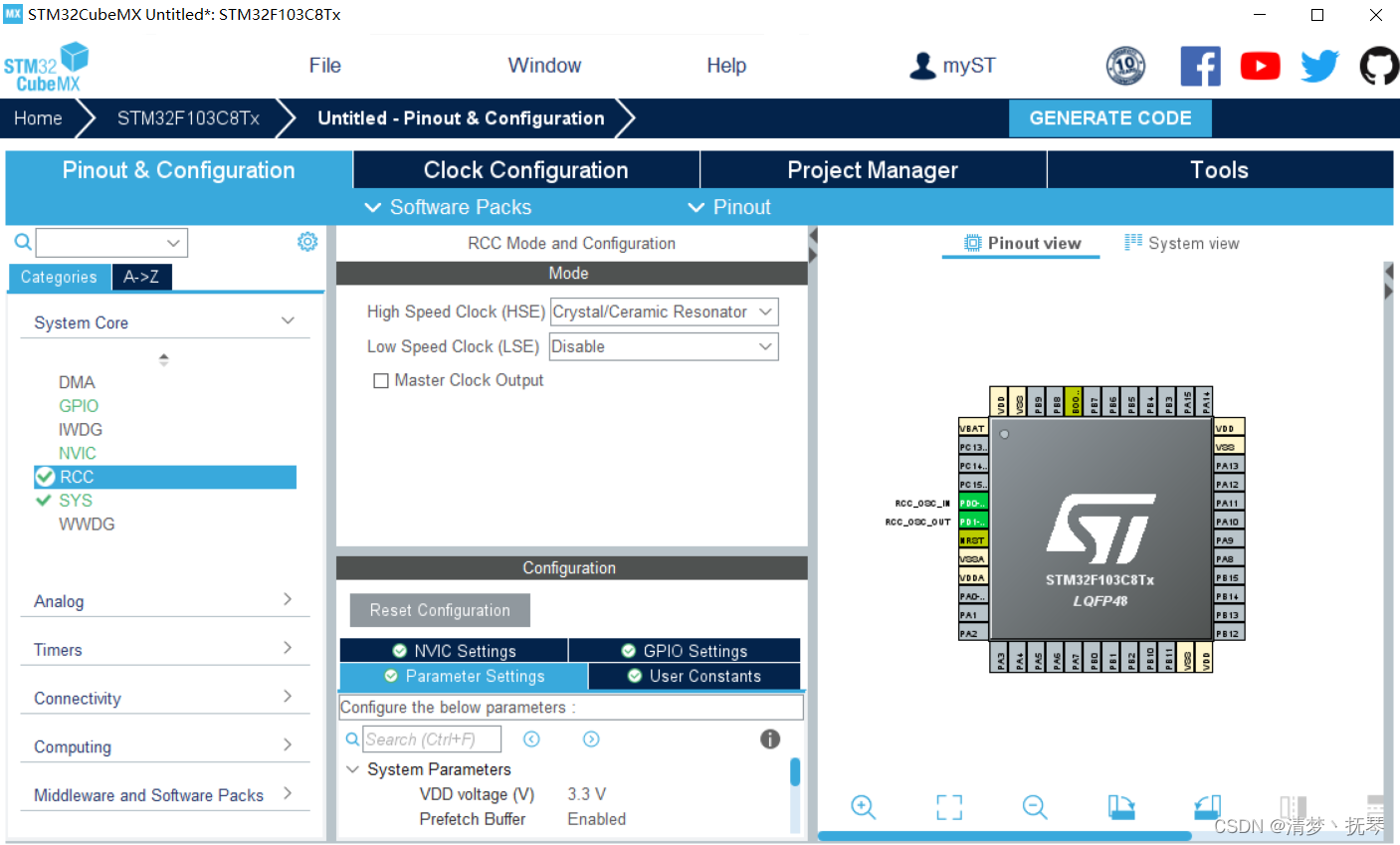
(3)配置RCC
点System Cor,选择RCC,在右侧弹出的菜单栏中选Crystal/Ceramic Resonator
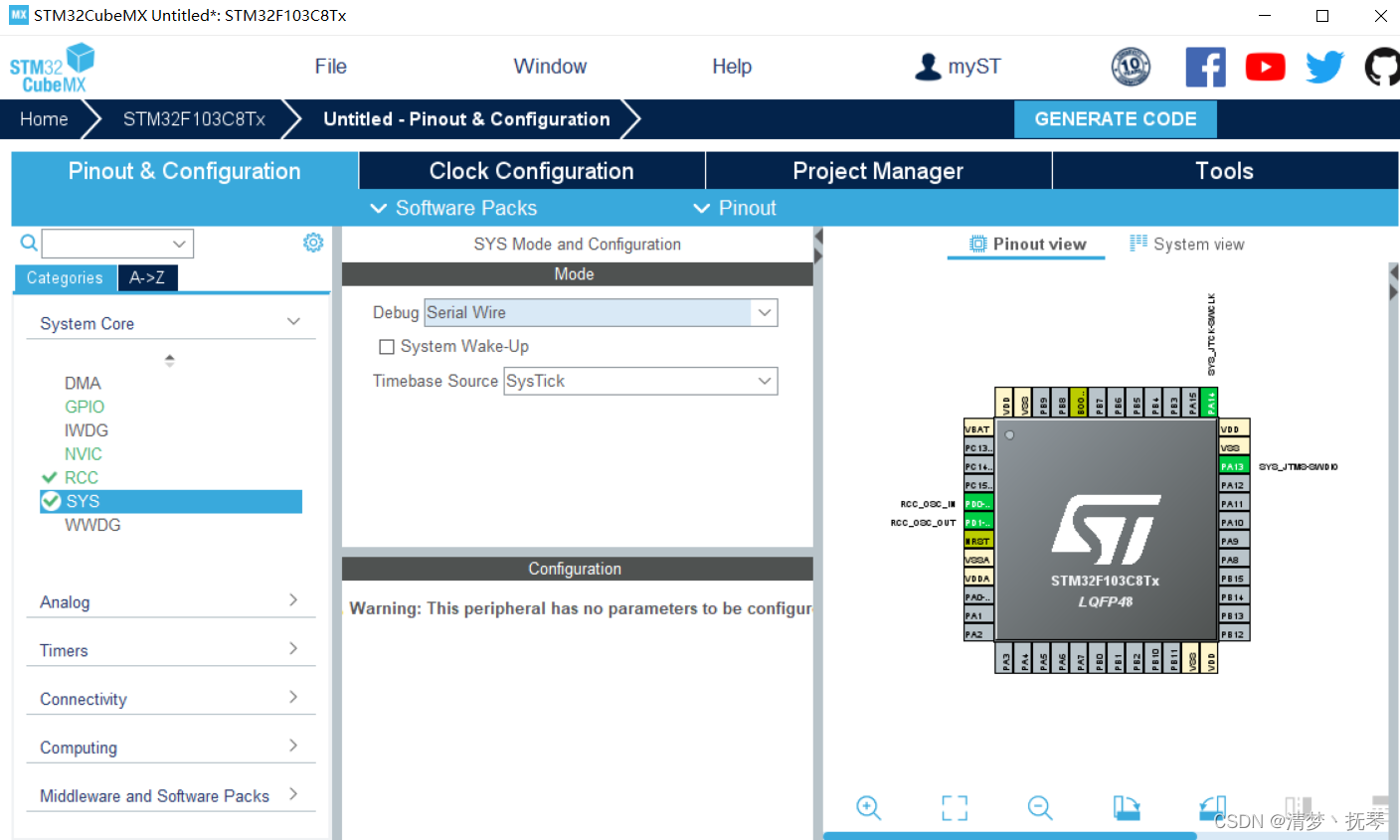
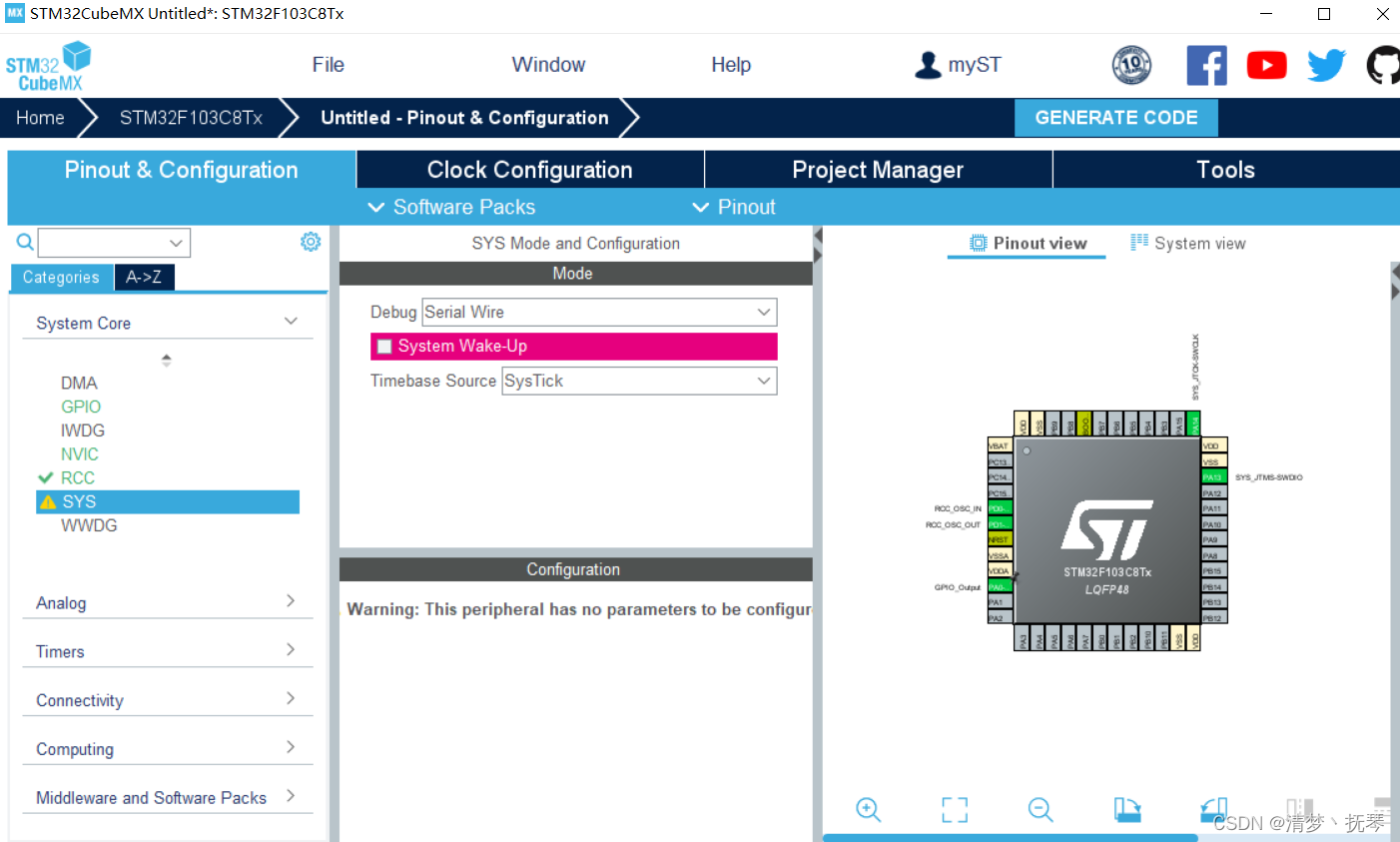
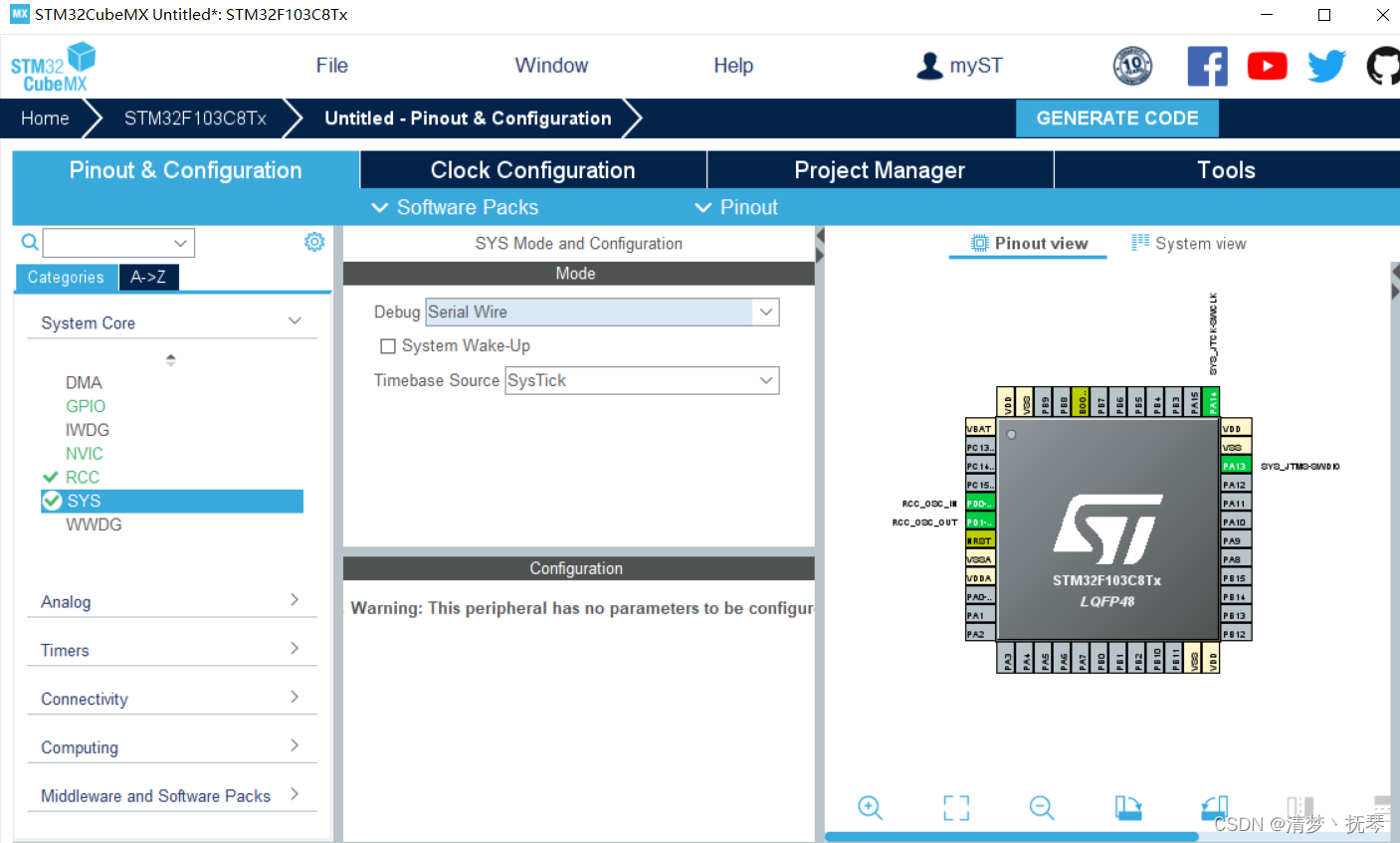
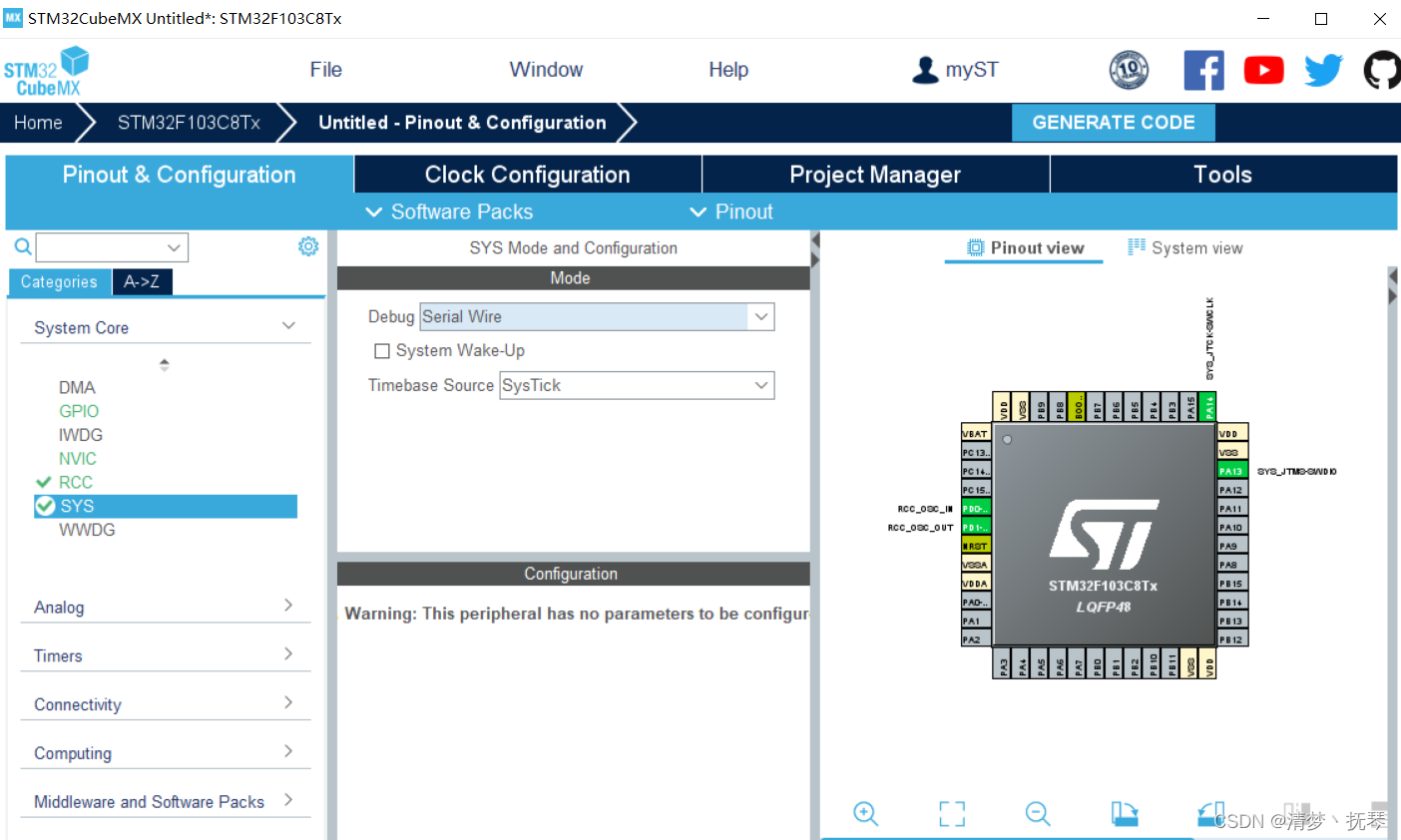
(4)配置SYS
选择调试接口,点System Cor,选择SYS。,在右侧弹出的菜单栏中选Serial Wire。
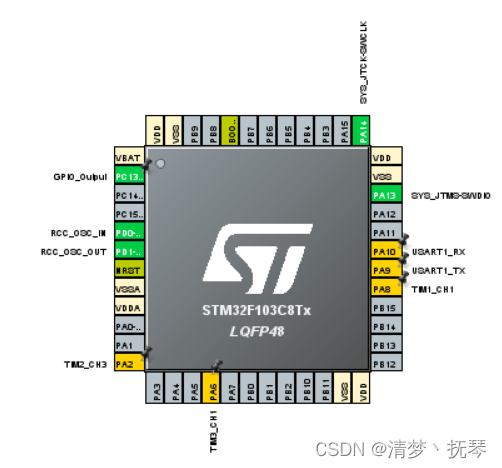
(5)配置IO口输出
这里选择PA0作为LED灯的输出,将其选为GPIO-OUT,这里我们只使用一个灯,做演示用。
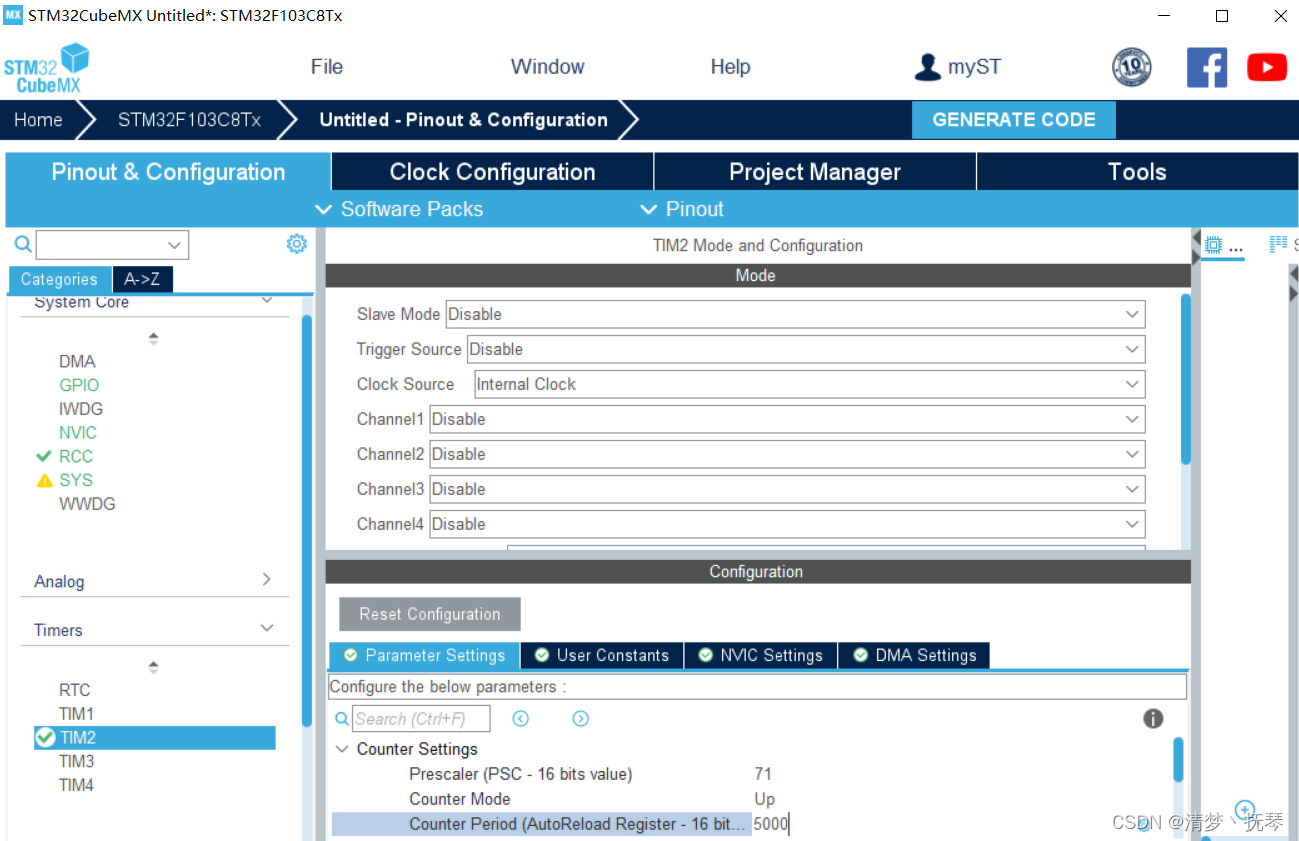
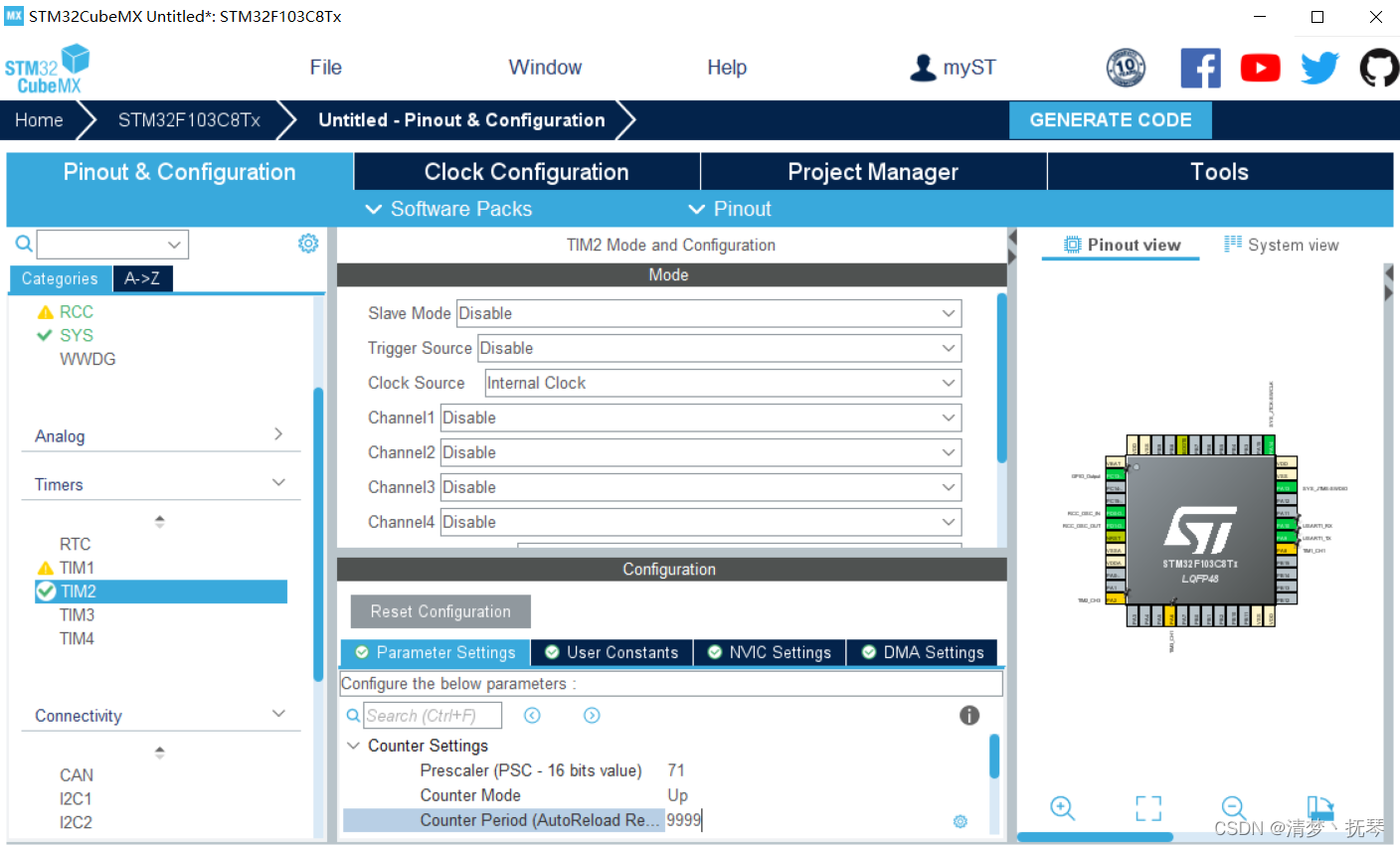
(6)配置定时器2和定时器3
这里我们使用定时器2和定时器3来实现定时的功能。如图所示,定时器2配置:依次点击位置2,选中定时器2;位置3,配置定时器2的时钟源为内部时钟;位置4,分频系数为71;位置5,向上计数模式,计数周期为5000,使能自动重载模式。
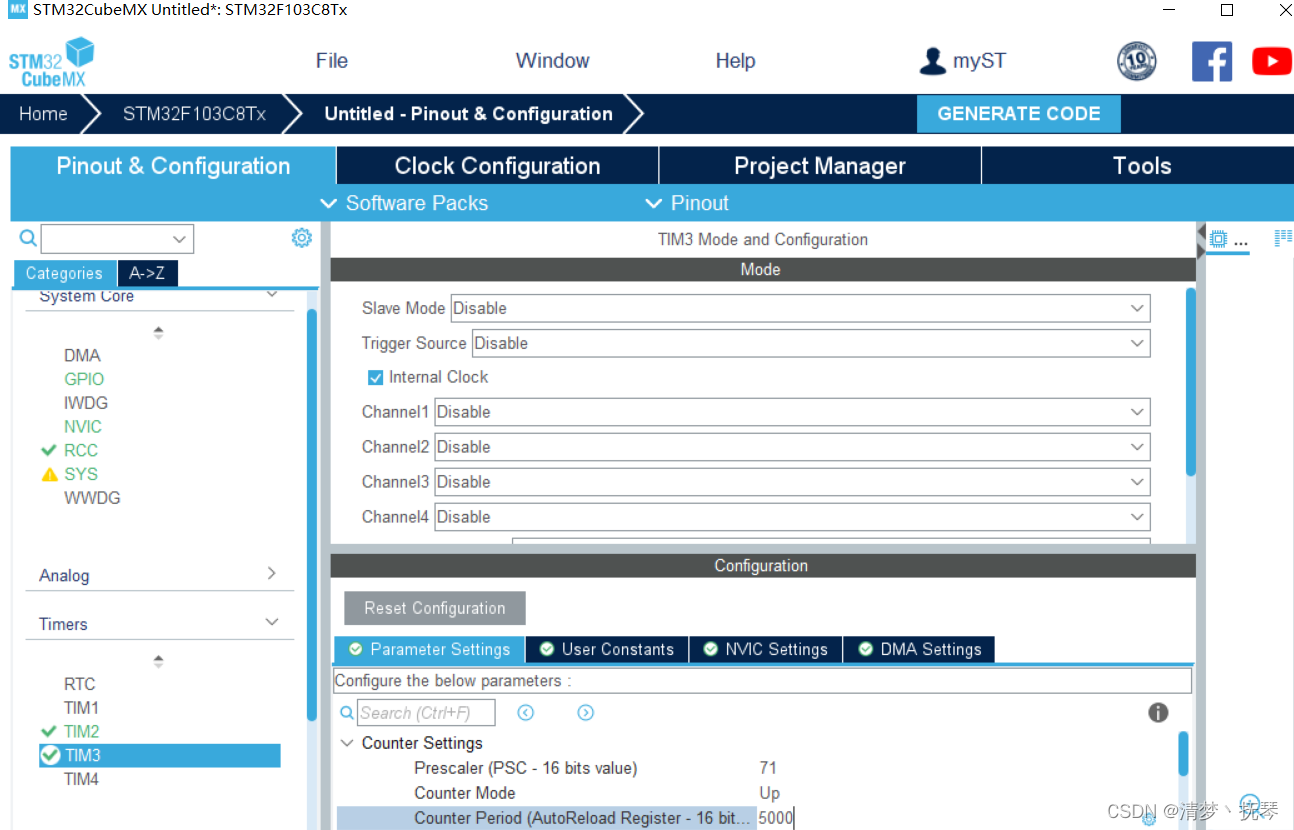
定时器3配置:依次按照下图所示进行配置即可:
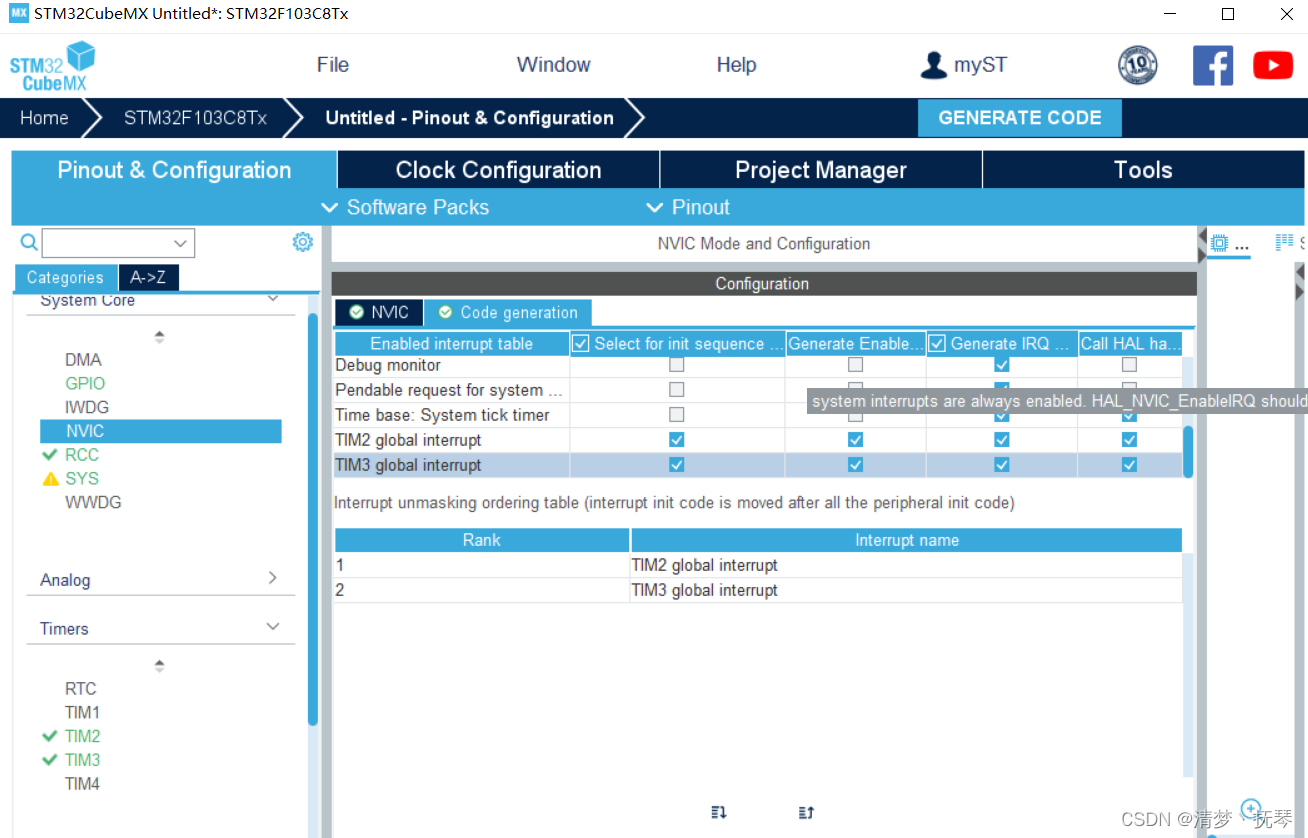
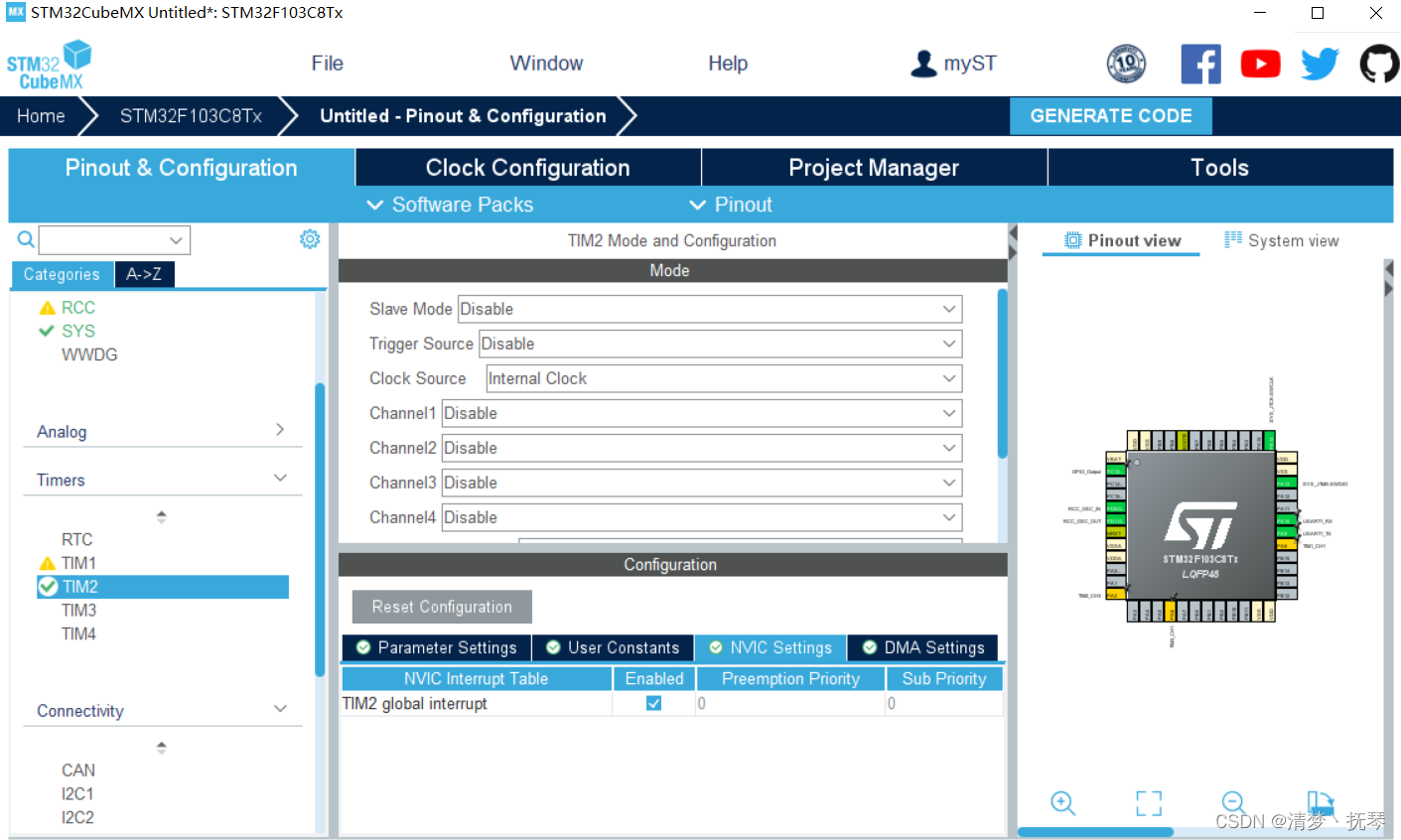
(7)配置中断
如下图所示,开启定时器2和定时器3的中断。
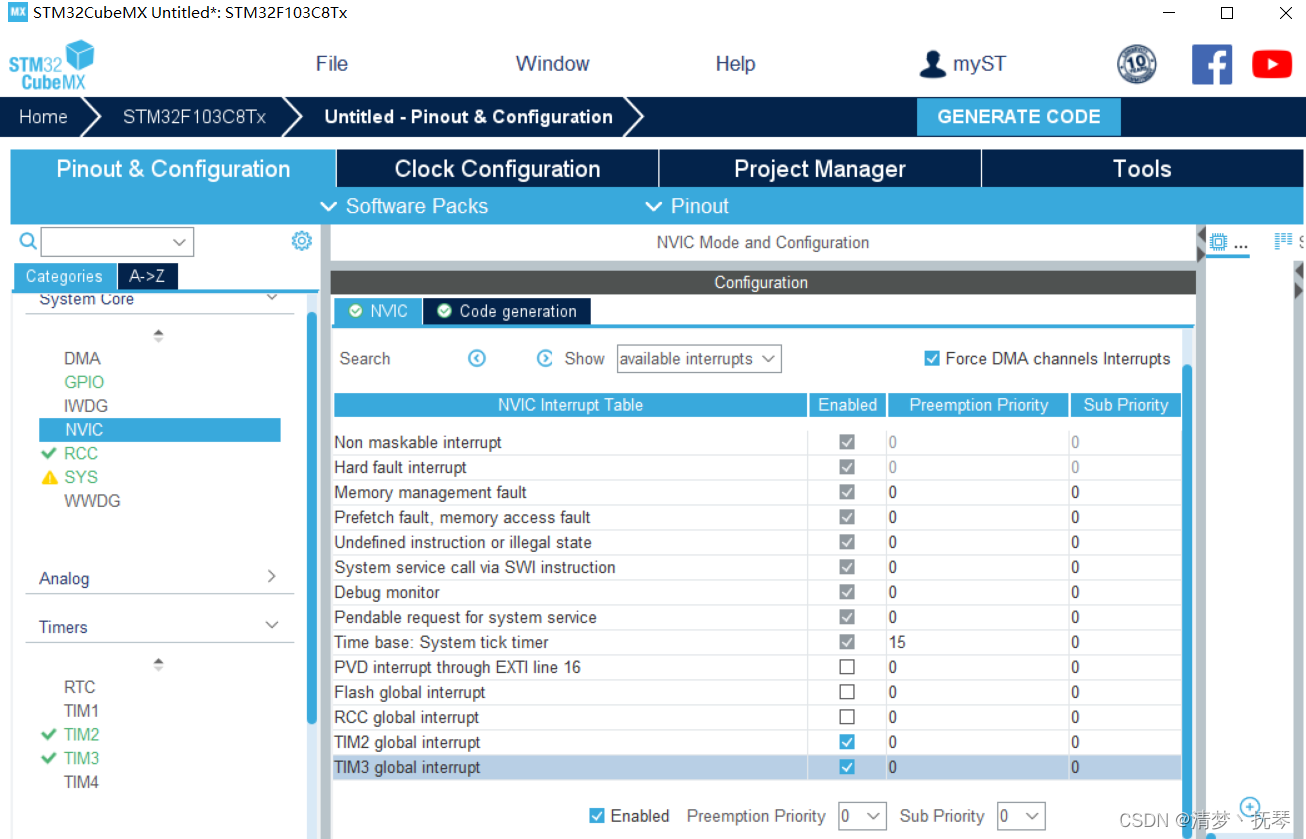
接着如下图所示,生成定时器2和定时器3中断优先级配置代码:
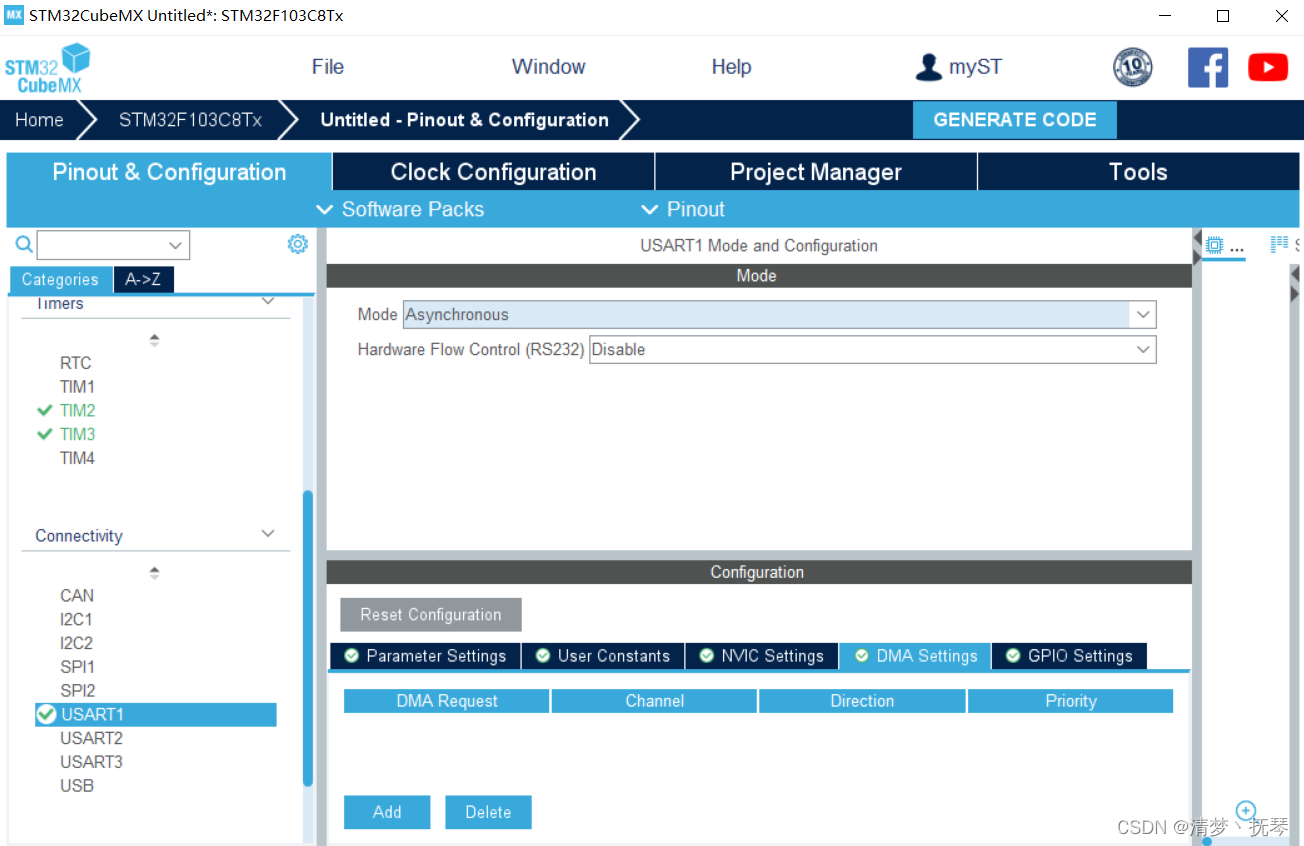
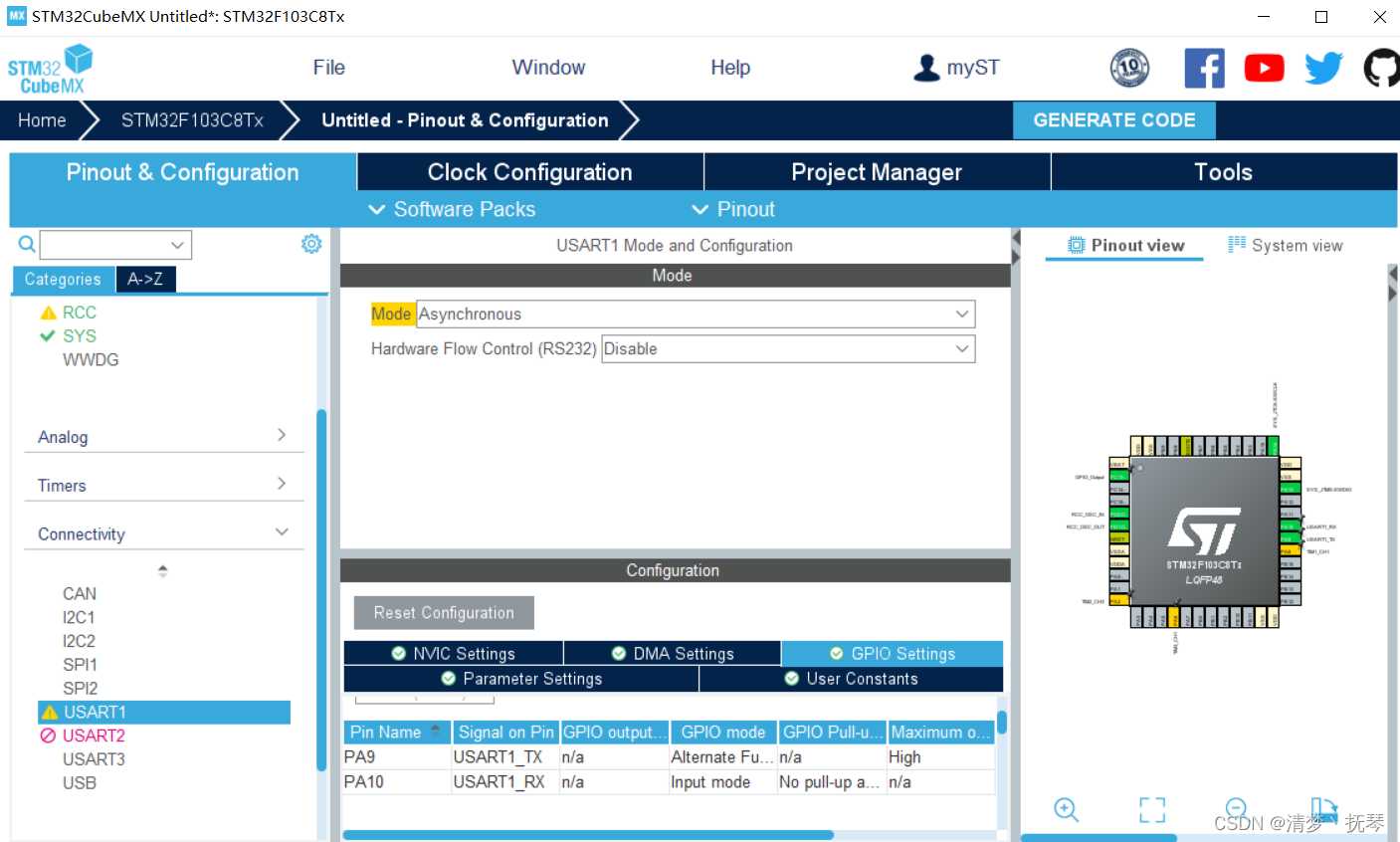
(8)配置USART
选择Connectivity,点开USART1,Mode选择异步通信Asynchronous
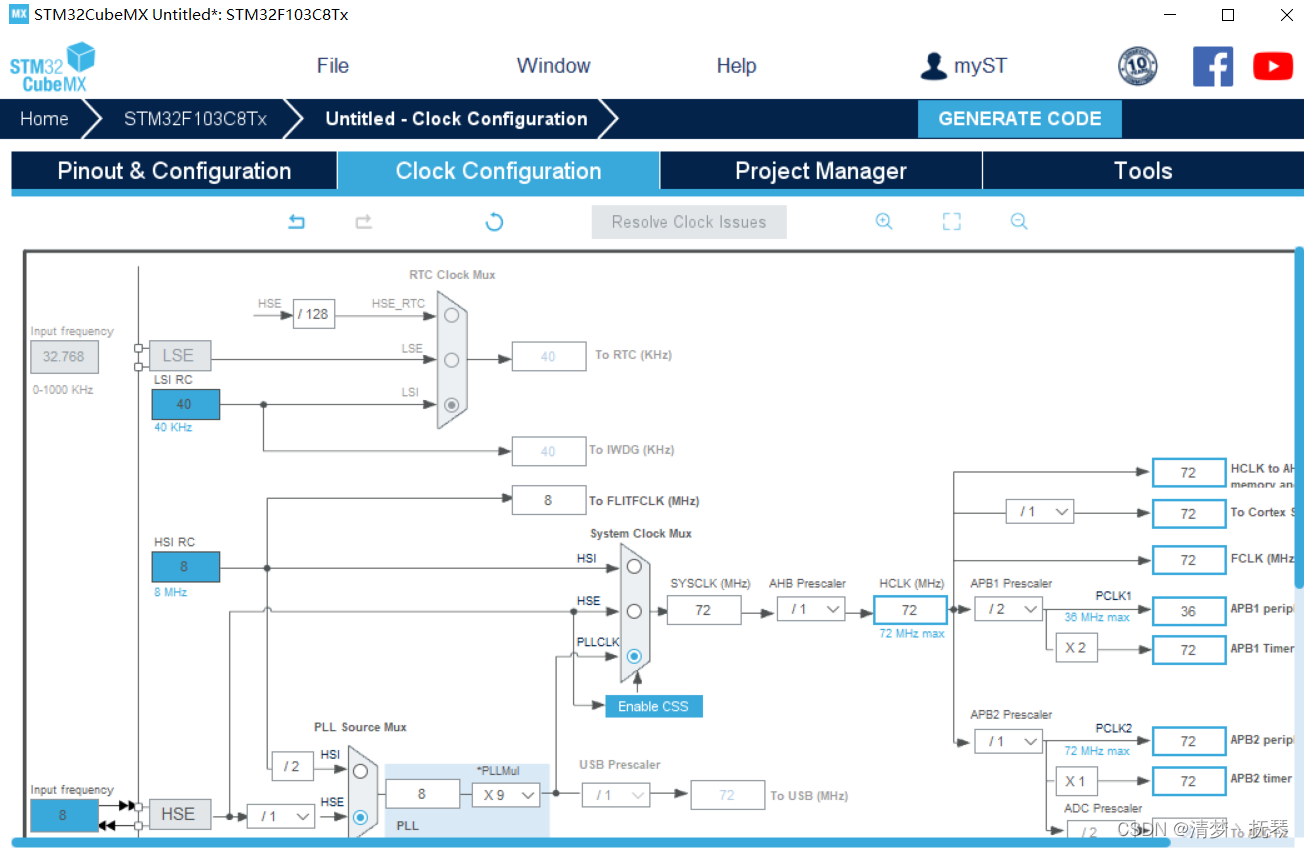
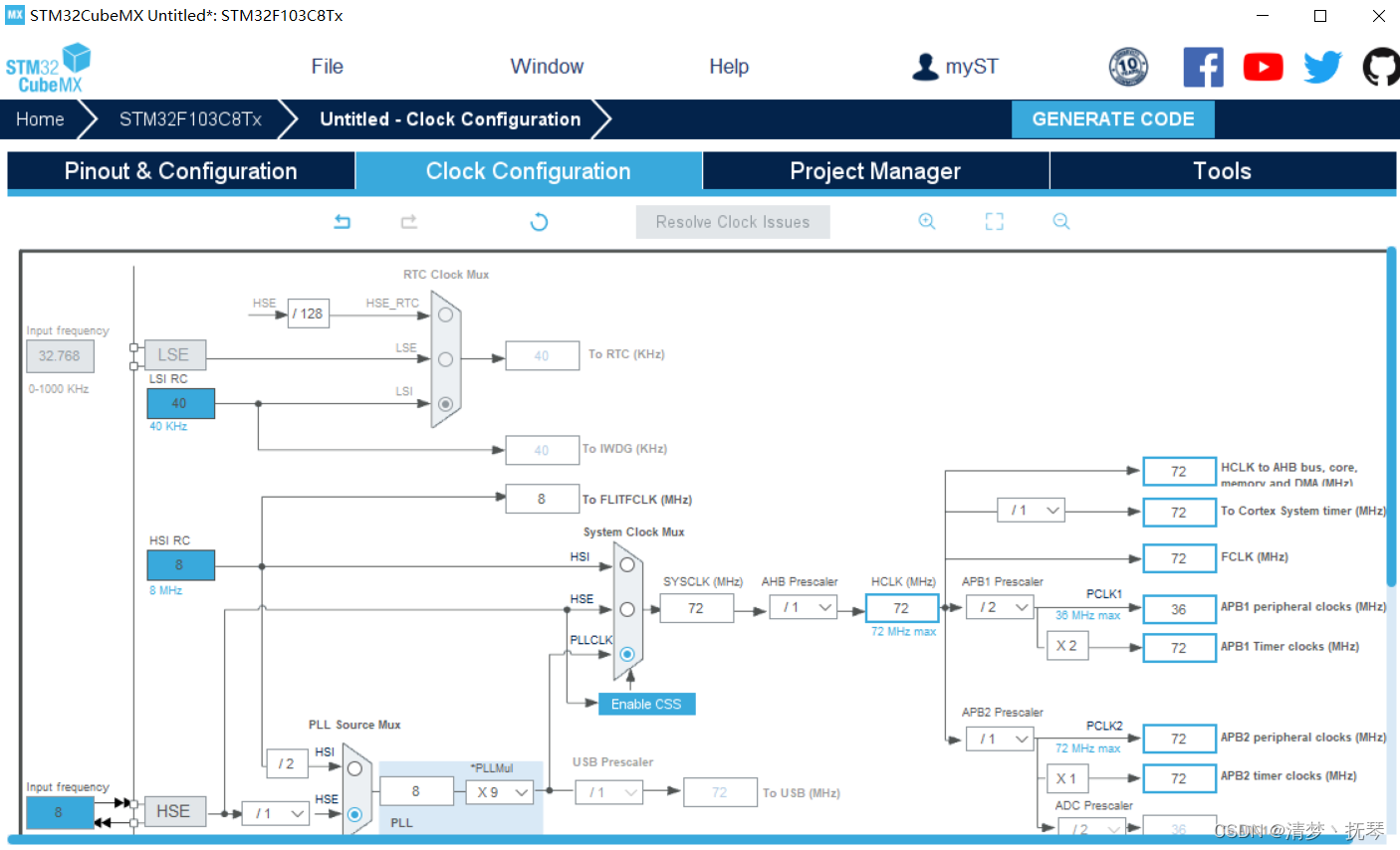
(9)进入CLK Configuration (时钟配置)中,进行时钟配置:
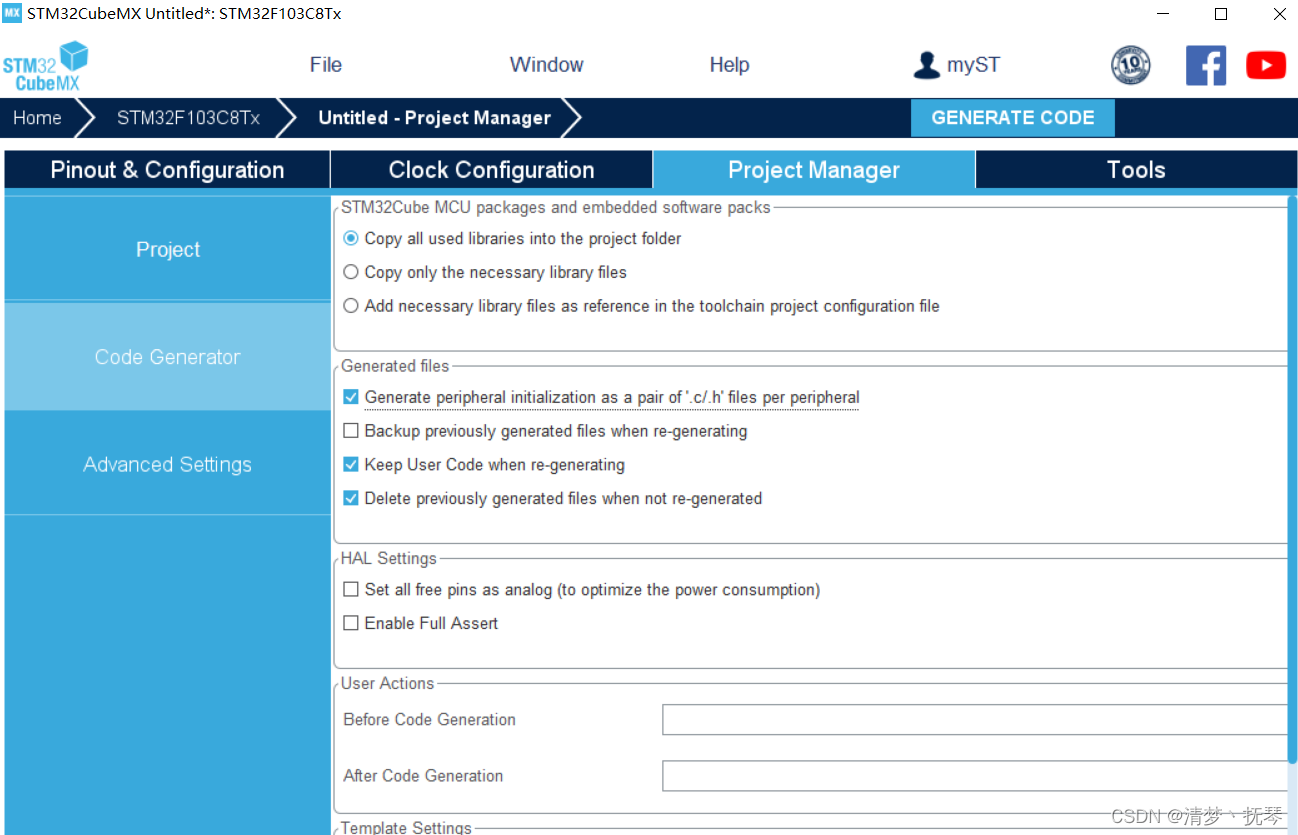
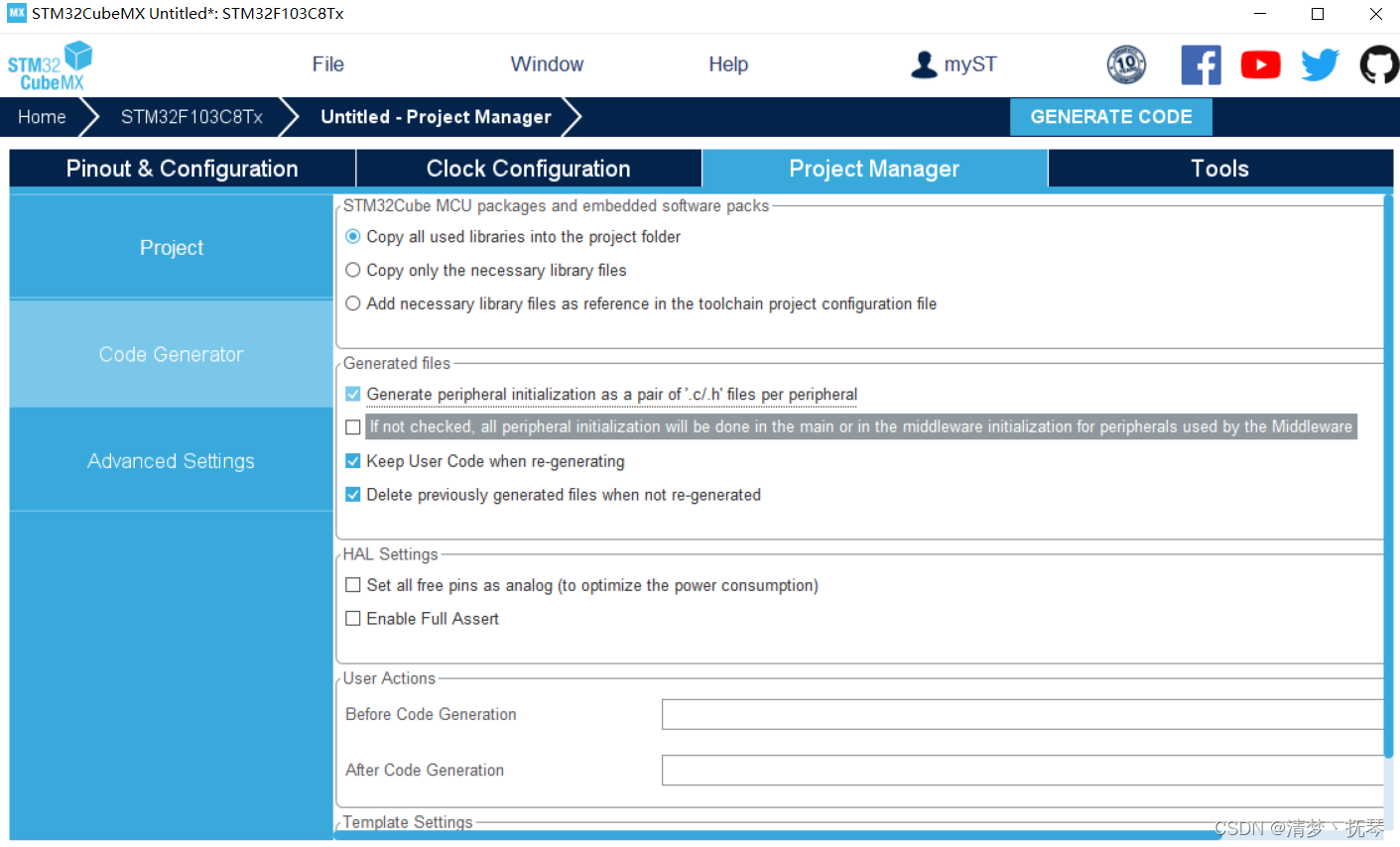
(10)进入Project Manager(工程管理),进行工程设置点击生成工程与代码:
完善keil5工程
(1) 在main.c中添加启动定时器代码:
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
(2)串口通信
在main.c中定义STM32需要给上位机发送的消息
uint8_t hello[20]="hello windows!\r\n";
(3) 在main.c中添加定时器中断回调函数:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint32_t time_cnt =0;
static uint32_t time_cnt3 =0;
if(htim->Instance == TIM2)
{
if(++time_cnt >= 400)
{
time_cnt =0;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_1);
}
}
if(htim->Instance == TIM3)
{
if(++time_cnt3 >= 1000)
{
time_cnt3 =0;
HAL_UART_Transmit(&huart1,hello,20,100000);
}
}
}
(4)完整main.c代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_NVIC_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
uint8_t hello[20]="hello windows!\r\n";
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
/* Initialize interrupts */
MX_NVIC_Init();
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief NVIC Configuration.
* @retval None
*/
static void MX_NVIC_Init(void)
{
/* TIM2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* TIM3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
}
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint32_t time_cnt =0;
static uint32_t time_cnt3 =0;
if(htim->Instance == TIM2)
{
if(++time_cnt >= 400)
{
time_cnt =0;
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_0);
}
}
if(htim->Instance == TIM3)
{
if(++time_cnt3 >= 1000)
{
time_cnt3 =0;
HAL_UART_Transmit(&huart1,hello,20,100000);
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
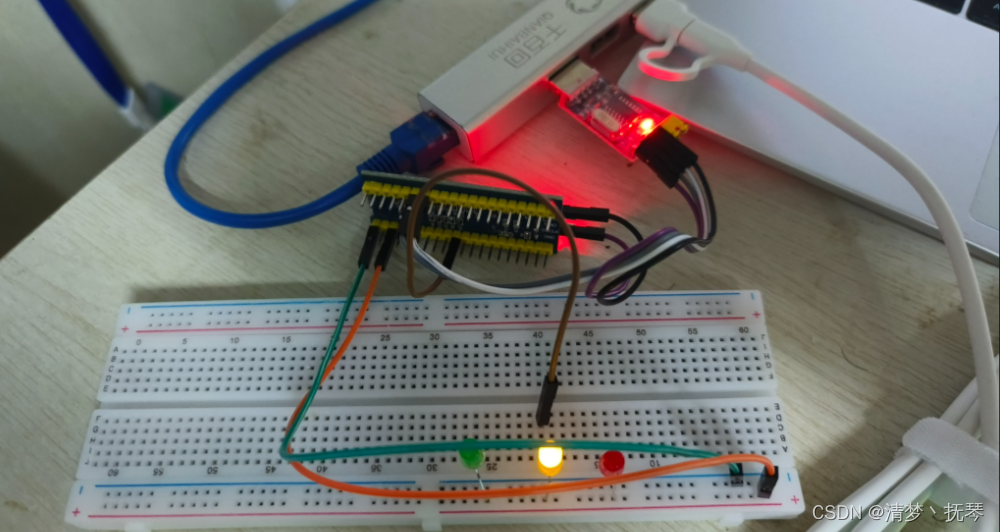
实物演示
烧录运行结果展示:
PWM完成呼吸灯
CubeMX创建工程项目
1、使用HAL库建立工程:
(1)打开STM32CubeMX,在主界面点击:ACCESS TO MCU SELECTOR:
(2)选择的单片机型号以及点击开始工程项目:
(3)配置RCC
点System Cor,选择RCC,在右侧弹出的菜单栏中选Crystal/Ceramic Resonator
(4)配置SYS
选择调试接口,点System Cor,选择SYS。,在右侧弹出的菜单栏中选Serial Wire。
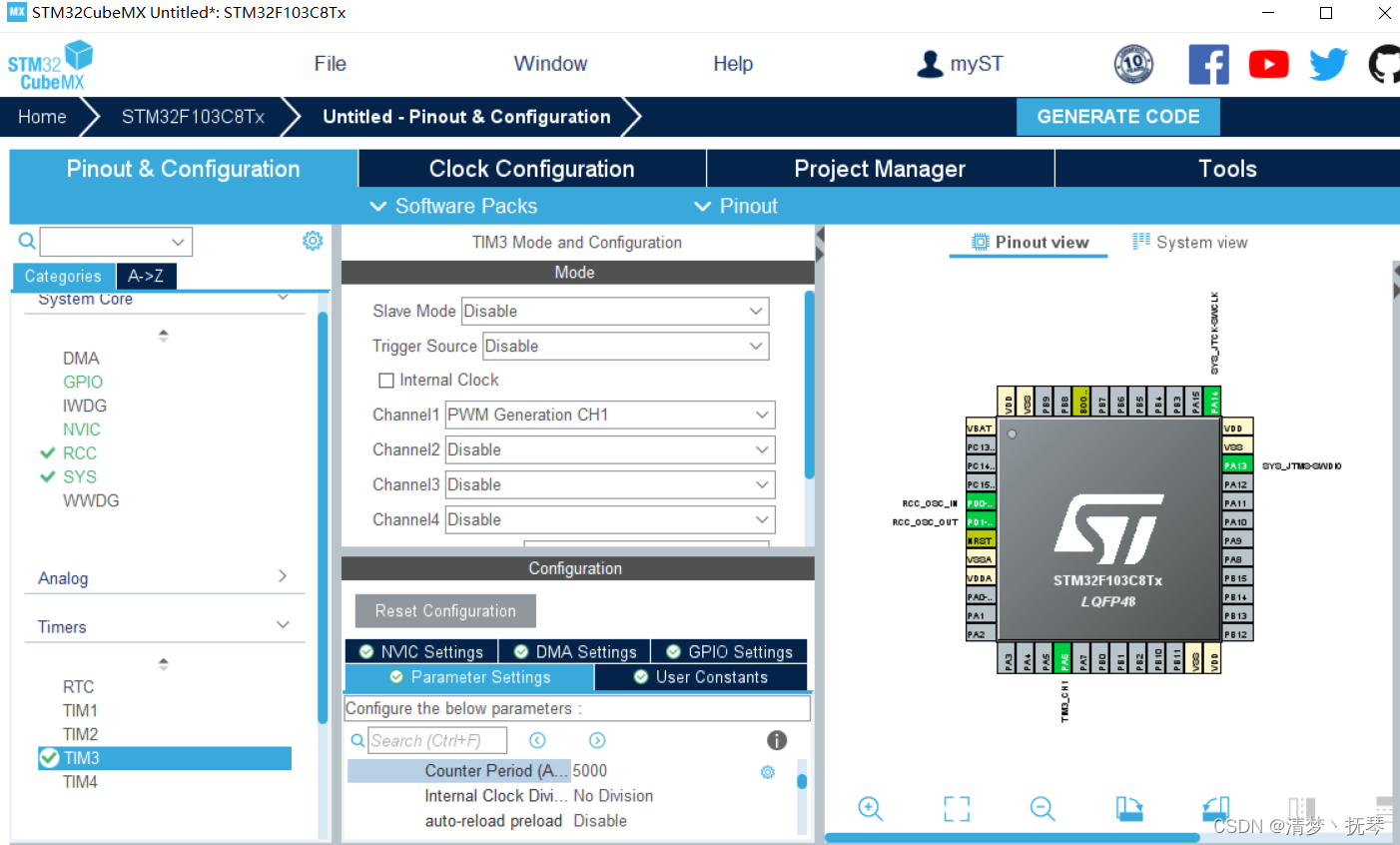
 (5)配置定时器3和定时器4
(5)配置定时器3和定时器4
这里我们选择定时器3和定时器4来实现定时的功位置3,分频系数为71,向上计数模式,计数周期为500,使能自动重载模式。通道1选择:PWM Generation CH1(PWM输出通道1)
设置分频系数为71,计数周期为500,其它默认。
设置占空比初始值为10。
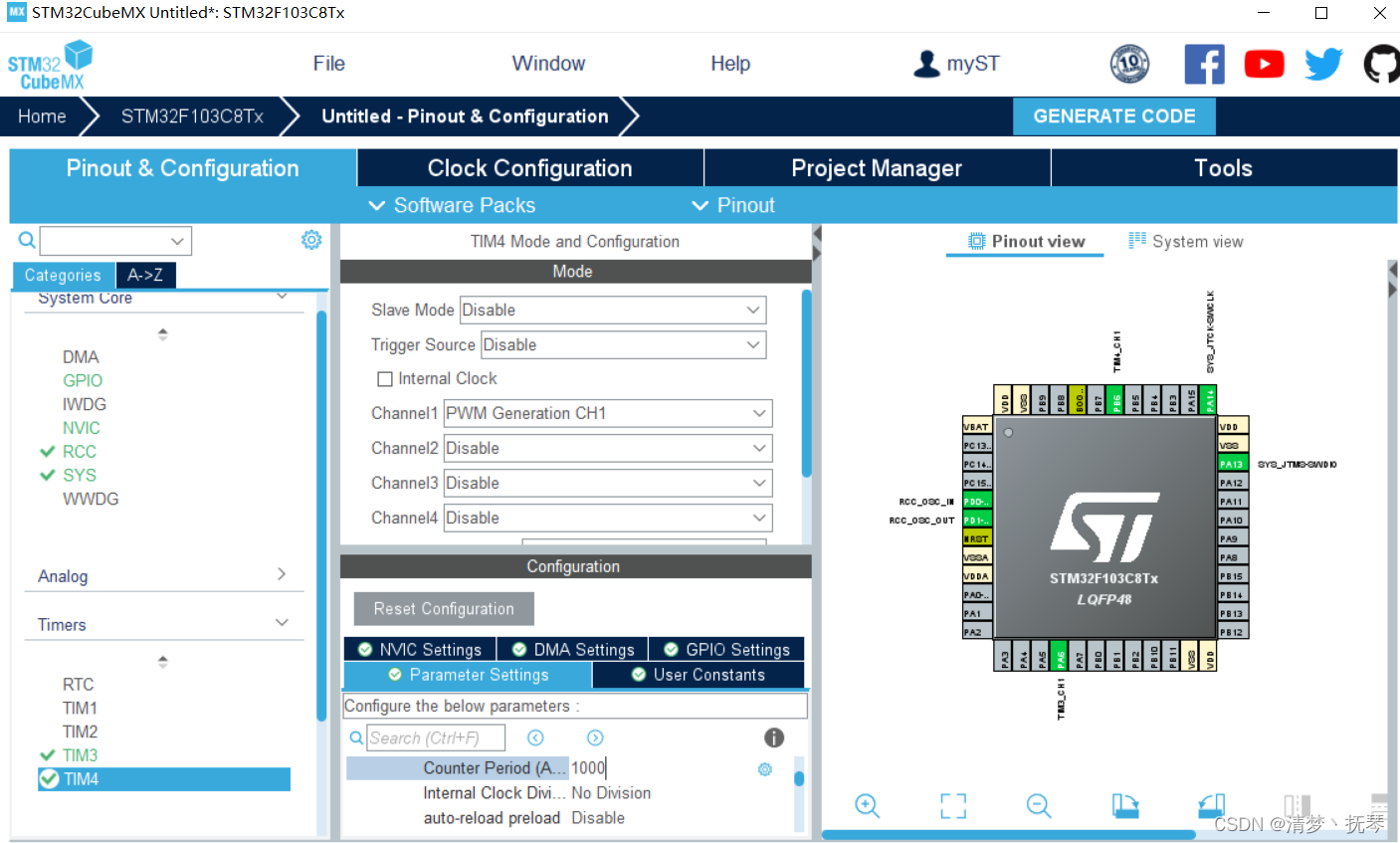
定时器四我们也选择PWM Generation CH1(PWM输出通道1),计数周期根据自己需要进行设置
(5)进入CLK Configuration (时钟配置)中,进行时钟配置:
(6)进入Project Manager(工程管理),进行工程设置点击生成工程与代码:
完善keil5工程
(1)设置占空比
打开工程main.c文件。首先定义一个变量,用来存储占空比:初值设为10:
uint16_t duty_num3 = 10;
uint16_t duty_num4 = 10;
(2)开启PWM信道
开始TIM3的通道3,输出PWM。
开始TIM4的通道4,输出PWM。
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);
(3)调用代码
这里我们设置为每隔50毫秒,占空比加10,如果超过500(也就是PWM周期),自动变成0。(即灯会从亮倒暗,逐渐变化)
while (1)
{
/* USER CODE END WHILE */
HAL_Delay(50);
duty_num3 = duty_num3 + 10;
duty_num4 = duty_num4 + 10;
if(duty_num3 > 500)
{
duty_num3 = 0;
}
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,duty_num3);
if(duty_num4 > 500)
{
duty_num4 = 0;
}
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_1,duty_num4);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
(4)完整main.c代码如下所示:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
uint16_t duty_num3 = 10;
uint16_t duty_num4 = 10;
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM3_Init();
MX_TIM4_Init();
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_1);
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_Delay(50);
duty_num3 = duty_num3 + 10;
duty_num4 = duty_num4 + 10;
if(duty_num3 > 500)
{
duty_num3 = 0;
}
__HAL_TIM_SetCompare(&htim3,TIM_CHANNEL_1,duty_num3);
if(duty_num4 > 500)
{
duty_num4 = 0;
}
__HAL_TIM_SetCompare(&htim4,TIM_CHANNEL_1,duty_num4);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
实物演示
烧录运行结果展示:

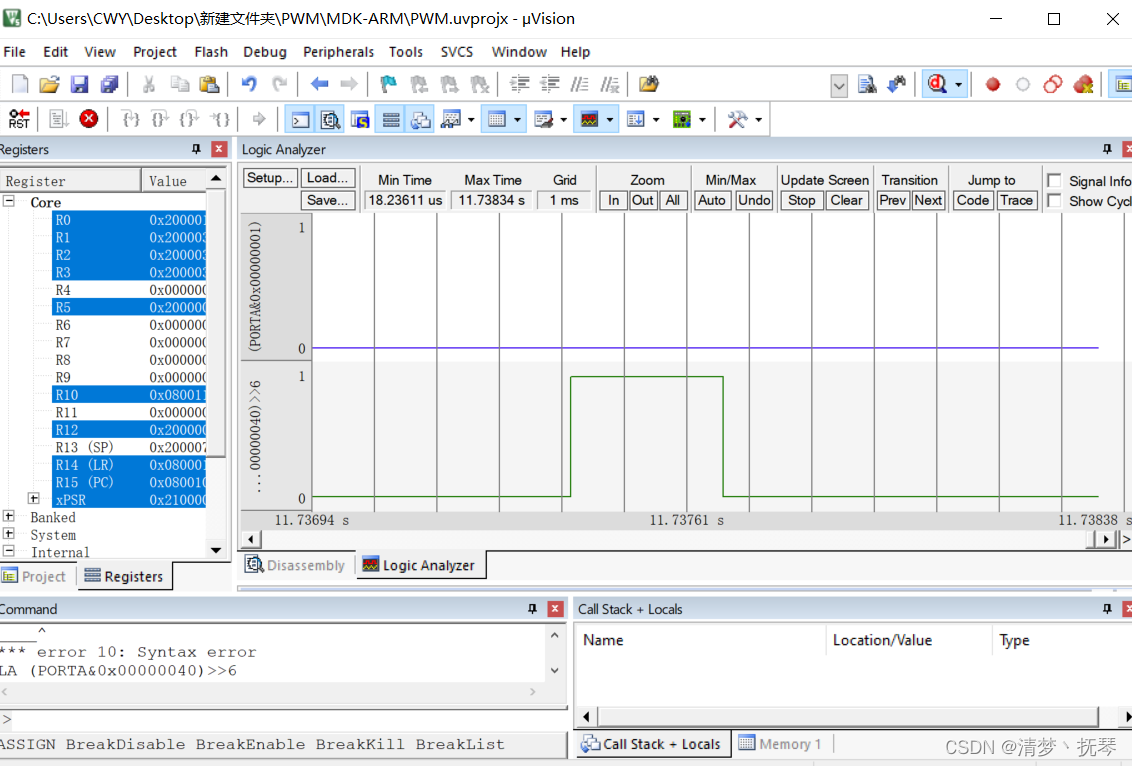
Keil虚拟示波器,观察 pwm输出波形:
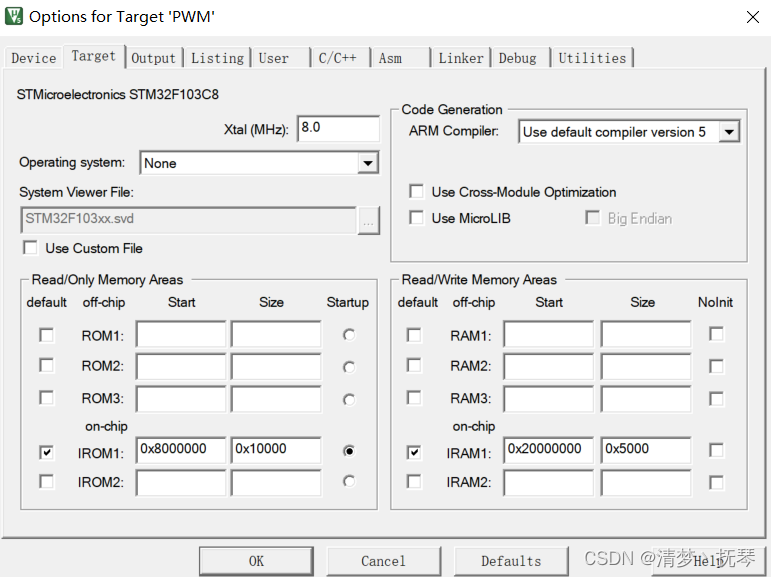
(1、进入keil5仿真:
1)点击第一步,Target界面中,选择跟正确的晶振大小,使用8MHz的外部晶振:
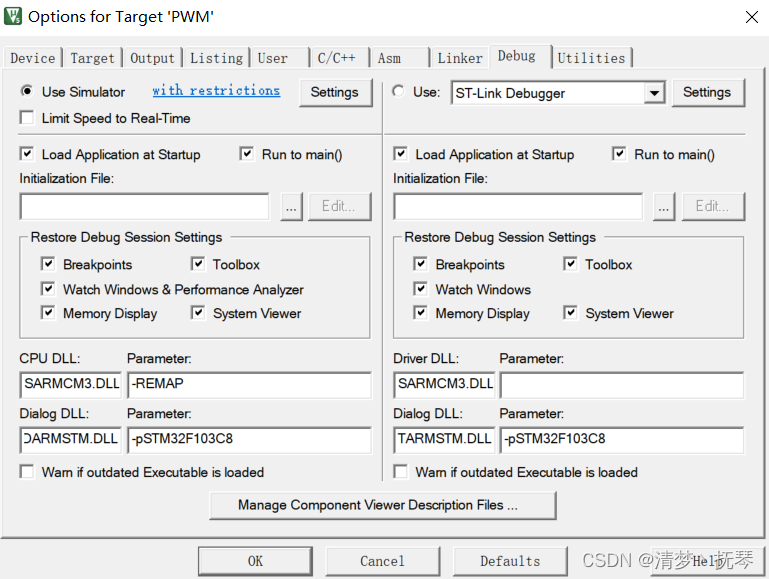
(2)接着进行Debug页的设置:
(3)点击图示圈住的地方进入仿真调试界面
(4)选择逻辑分析仪: 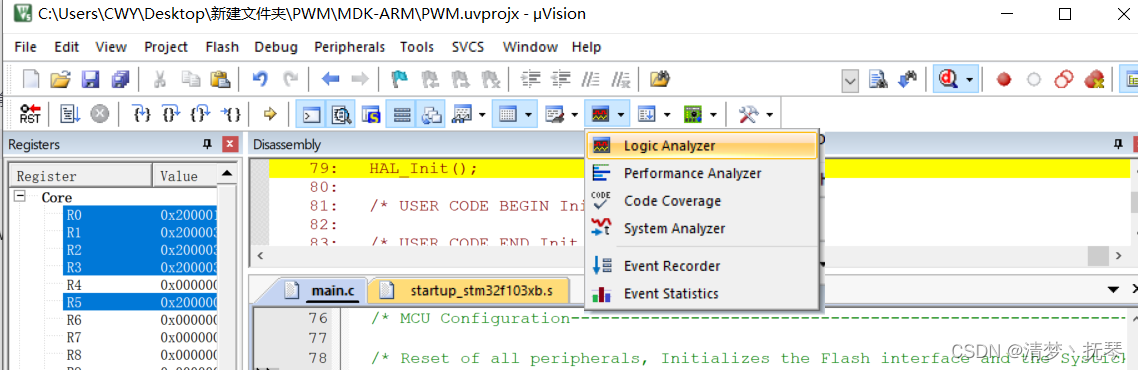
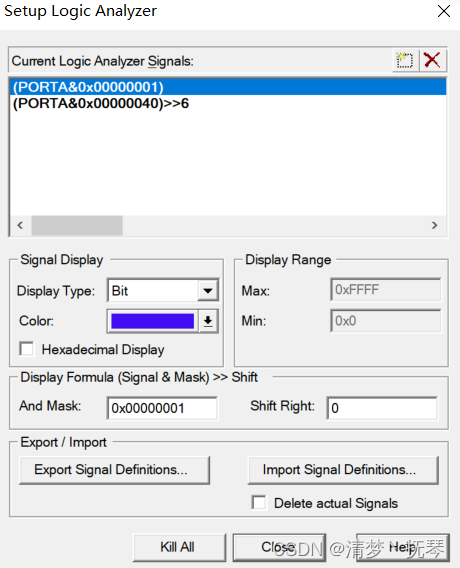
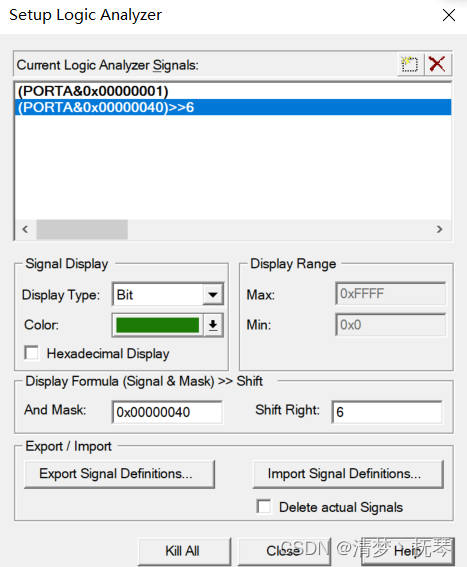
(5)点击Setup设置添加要进行观察的引脚:
( 2、开始仿真:
(1)点击图示圈住的部分,进行仿真
(2)仿真结果:
定时器pwm完成呼吸灯和对于pwm输出信号的采集与捕获
CubeMX创建工程项目
1、使用HAL库建立工程
(1)打开STM32CubeMX,在主界面点击:ACCESS TO MCU SELECTOR:
 (2)选择的单片机型号以及点击开始工程项目:
(2)选择的单片机型号以及点击开始工程项目:
(3)配置RCC
点System Cor,选择RCC,在右侧弹出的菜单栏中选Crystal/Ceramic Resonator

(4)配置SYS
选择调试接口,点System Cor,选择SYS。,在右侧弹出的菜单栏中选Serial Wire。
(5)选择对应的单片机端口配置使用:
(6)串口通信配置,如下图所示:
(7)定时器定时配置(TIM2),按照图中步骤进行配置即可:
(8)PWM波形捕获(TIM1),按照图中步骤进行配置即可:
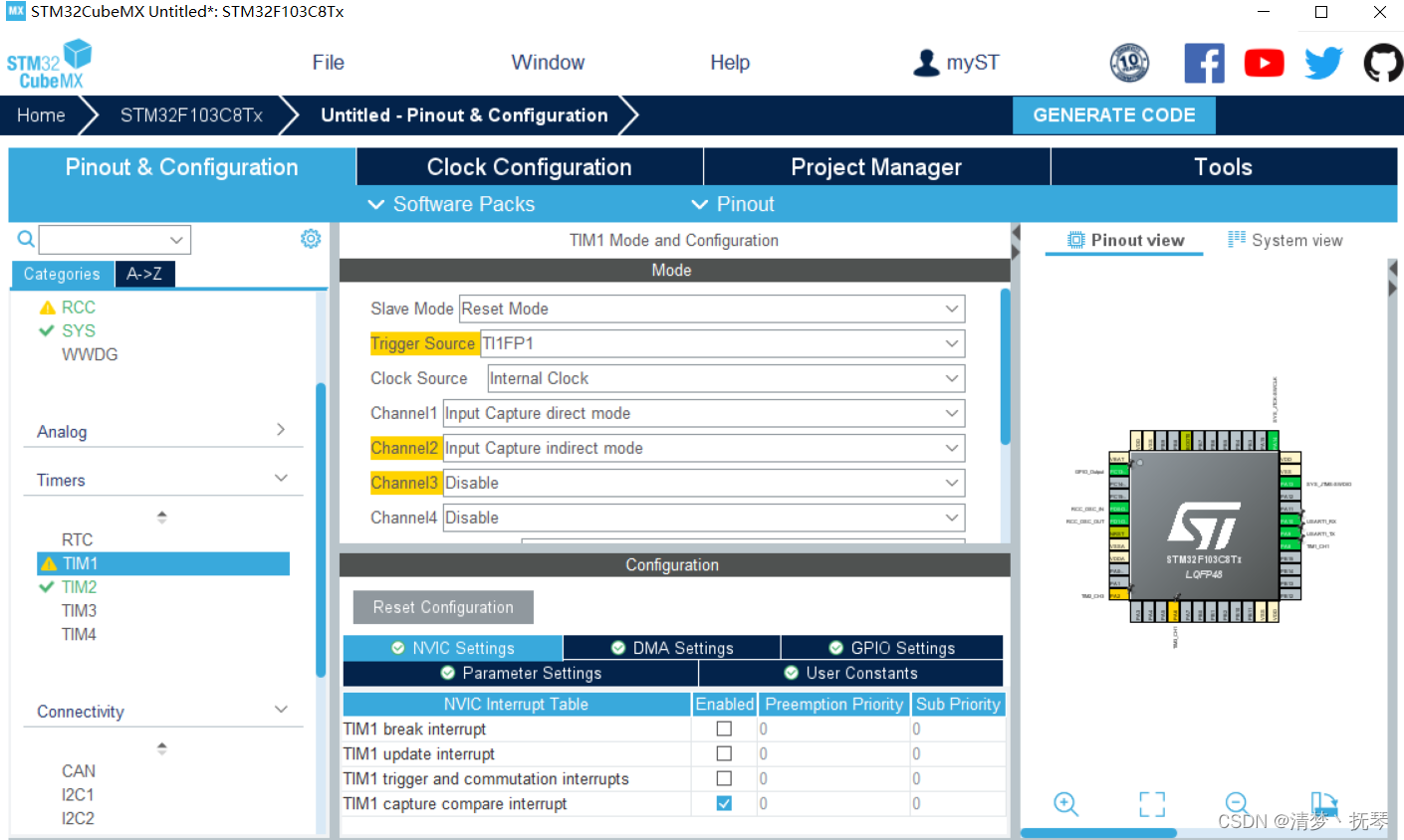
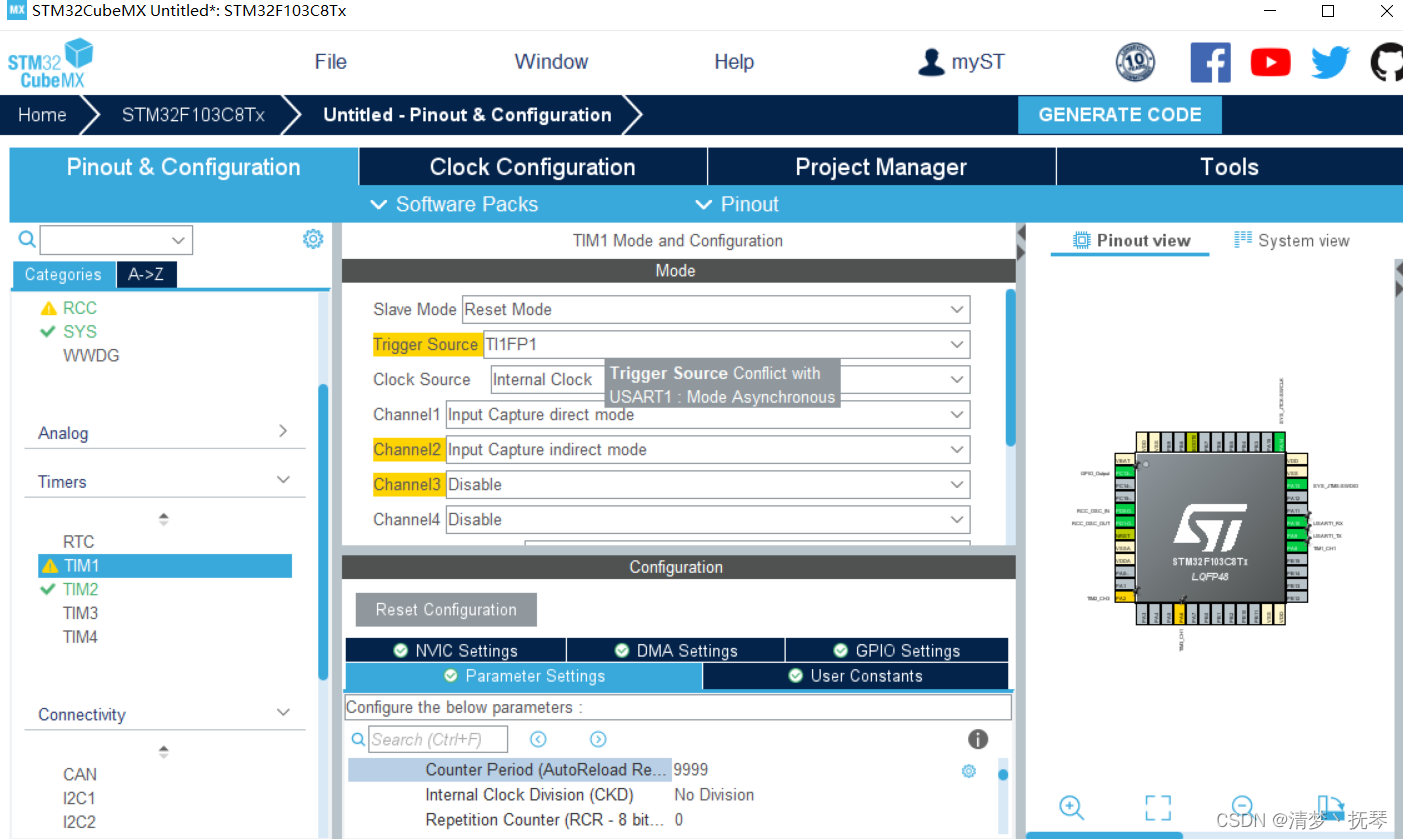
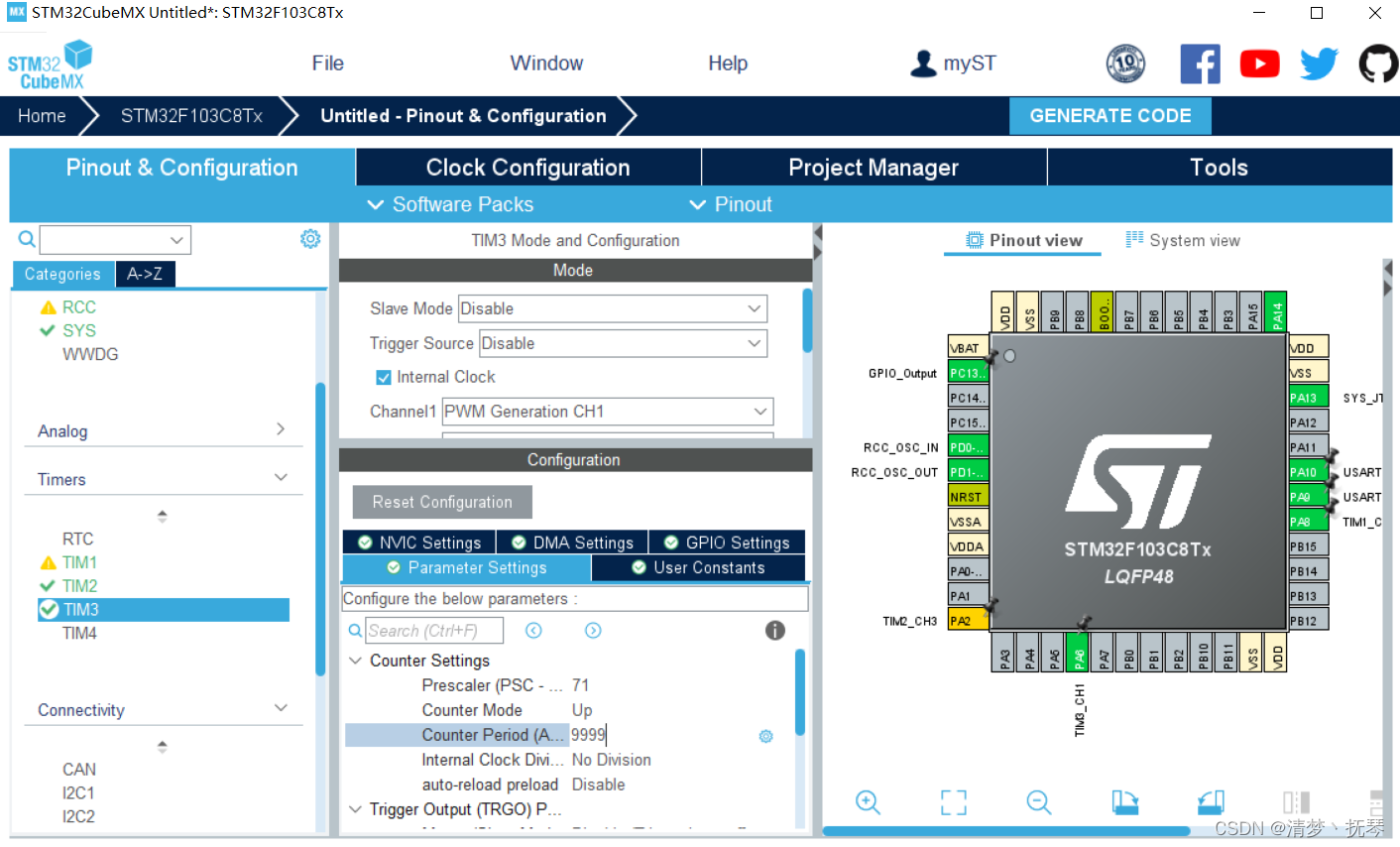
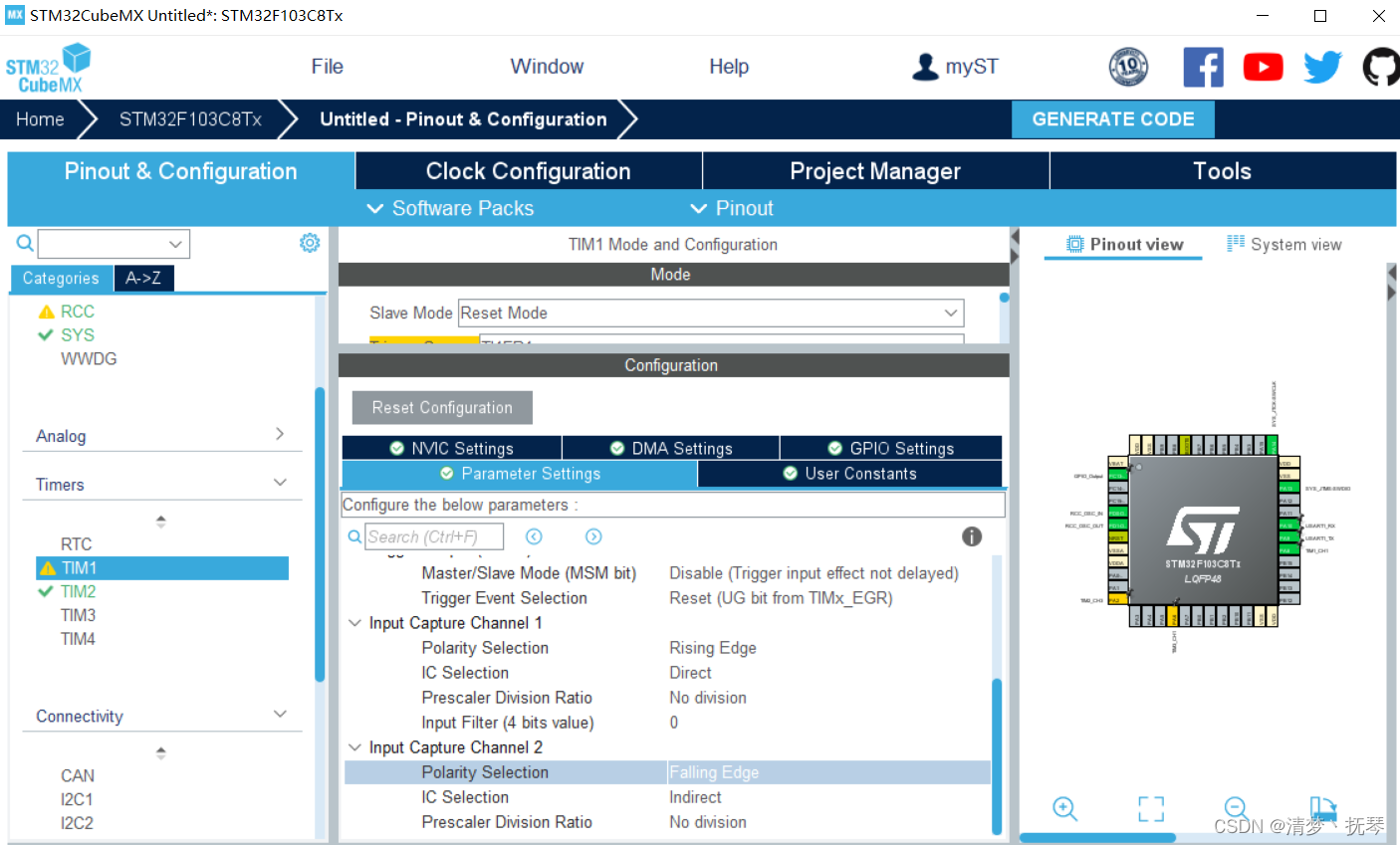 (9)PWM生成配置(TIM3),按照图中步骤进行配置即可:
(9)PWM生成配置(TIM3),按照图中步骤进行配置即可:
(10)生成工程文件
完善keil工程
完善之后的完整main.c代码如下:
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
uint8_t i = 0;
float Duty = 0;
float Frequency = 0;
uint16_t Cap_val1 = 0;
uint16_t Cap_val2 = 0;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
/* USER CODE BEGIN WHILE */
printf("串口通信测试\r\n");
HAL_TIM_Base_Start_IT(&htim2); // 使能定时器及其更新中断
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); // 使能定时器及其PWM输出
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_1); // 使能定时器及其输入捕获
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_2); // 使能定时器及其输入捕获
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, 10); // 设置一个PWM波形进行测量
while (1)
{
// 串口发送 频率 占空比
printf("Cap_val1 is :%d , Cap_val2 is : %d \r\n", Cap_val1, Cap_val2);
printf("Duty is :%0.2f%% Frequency is : %0.2f ms\r\n", Duty, Frequency);
HAL_Delay(1000);
}
}
// 定时TIM2 定时亮灯的中断函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *tim)
{
if (tim == &htim2)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
}
}
// 定时输入捕获回调函数 计算占空比和频率
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM1)
{
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
Cap_val1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
}
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
Cap_val2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_2);
Duty = 100 - (float)Cap_val2 / (float)Cap_val1 * 100;
Frequency = 0.001 * Cap_val1;
}
}
}
实物演示
烧录运行结果展示:




























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









