






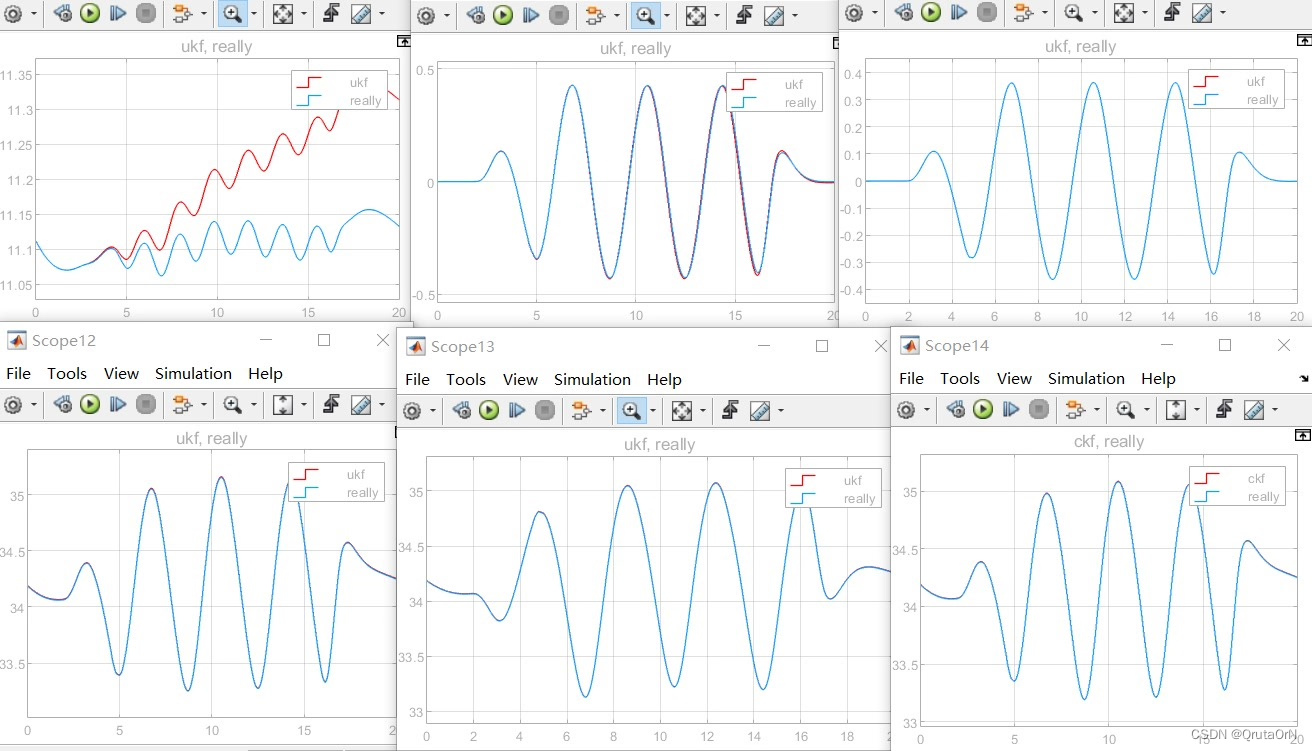
基于分布式驱动电动汽车的车辆状态估计,采用的是无迹卡尔曼(ukf)观测器,可估计包括纵向速度,质心侧偏角,横摆角速度,以及四个车轮角速度七个状态。
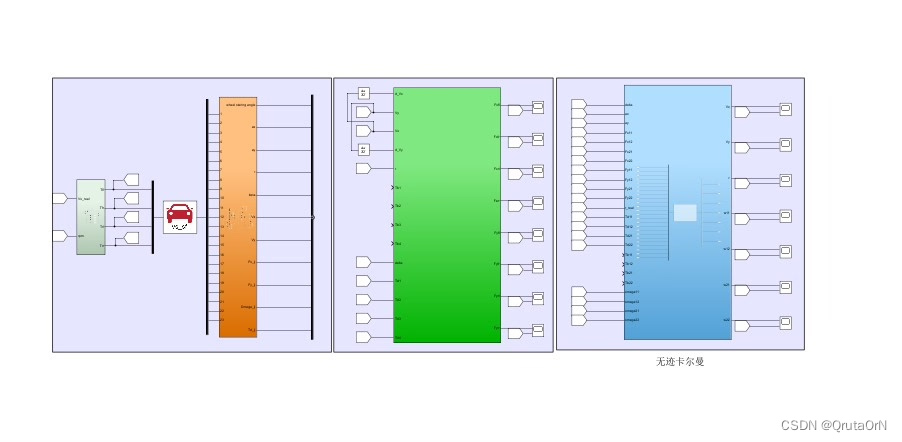
模型中第一个模块是四轮驱动电机;第二个模块是carsim输出的真实参数,包括汽车所受横向力,纵向力,驱动力矩等:第三个模块是基于dugoff计算轮胎力模块,该模块可以计算纵向力和横向力。
第四个模块是关于ukf的车辆状态估计,可估计包括纵向速度,横摆角速度,质心侧偏角以及四个车轮角速度七个状态。
模型和代码完全是由自己亲手编写,可供自己参考和学习。
本模型是基于simulink与carsim联合仿真,ckf是由s function进行编写,提供相关文献
基于分布式驱动电动汽车的车辆状态估计技术
近年来,随着电动汽车的普及和市场需求的不断增长,车辆状态估计技术逐渐成为汽车行业研究的热点之一。基于分布式驱动电动汽车的车辆状态估计技术是其中的一个重要方向。本文将结合无迹卡尔曼观测器(ukf)和其他相关模块,探讨基于分布式驱动电动汽车的车辆状态估计技术的研究进展。
基于分布式驱动电动汽车技术的车辆状态估计技术可以通过模型的设计来实现对车辆状态的估计。这里我们采用ukf观测器,该观测器可以估计包括纵向速度,质心侧偏角,横摆角速度,以及四个车轮角速度七个状态。这些状态的估计对于车辆控制具有重要的意义。下面我们将分别介绍四个模块的作用。
第一个模块是四轮驱动电机模块。四轮驱动电机是电动汽车的关键部件之一,可以通过电子控制系统实现对车轮的驱动和转向控制。在车辆状态估计中,该模块主要用于获取车轮位置信息,是整个车辆状态估计的重要输入。
第二个模块是carsim输出的真实参数模块,其中包括汽车所受横向力,纵向力,驱动力矩等。这些参数是根据实际行驶情况和车辆性能模型计算得出的,其准确性对车辆状态的估计具有重要的影响。
第三个模块是基于dugoff计算轮胎力模块。该模块可以计算纵向力和横向力,通过对车辆制动和转向的控制,可以实现对车辆运动状态的控制。这个模块的重要性在于,它可以通过计算轮胎力,为ukf观测器提供更准确的输入数据。
第四个模块是关于ukf的车辆状态估计模块。ukf是一种无迹卡尔曼观测器,可以通过对车辆运动状态的测量,实现对车辆状态的估计。该模块可以估计包括纵向速度,横摆角速度,质心侧偏角以及四个车轮角速度七个状态。ukf的观测过程通过多步推导实现,数据的准确性和处理能力取决于模型的设计和参数的选择。
总体而言,基于分布式驱动电动汽车技术的车辆状态估计技术的实现需要对多个模块进行协调和融合。本文通过介绍四个关键模块,探讨了该技术的实现原理和应用前景。但是,车辆状态估计技术的研究仍然面临很多挑战。例如,对车辆动力学和轮胎力学的精确建模,对传感器的准确度和安装位置的优化等问题都需要进一步探索和改进。总的来说,基于分布式驱动电动汽车技术的车辆状态估计技术在未来的发展中具有重要的意义,将为汽车行业的发展带来新的机遇和挑战。
本模型是基于simulink与carsim联合仿真,ckf是由s function进行编写,提供相关文献。模型和代码完全是由自己亲手编写,可供自己参考和学习。
相关代码,程序地址:http://lanzouw.top/700304237744.html















 159
159











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









