






基于A*算法的路径规划
鼠标自由选择起始点终点
五种地图随意切换,
附涵的代码注释
ID:639721400423432
琵琶巷多话的苁蓉
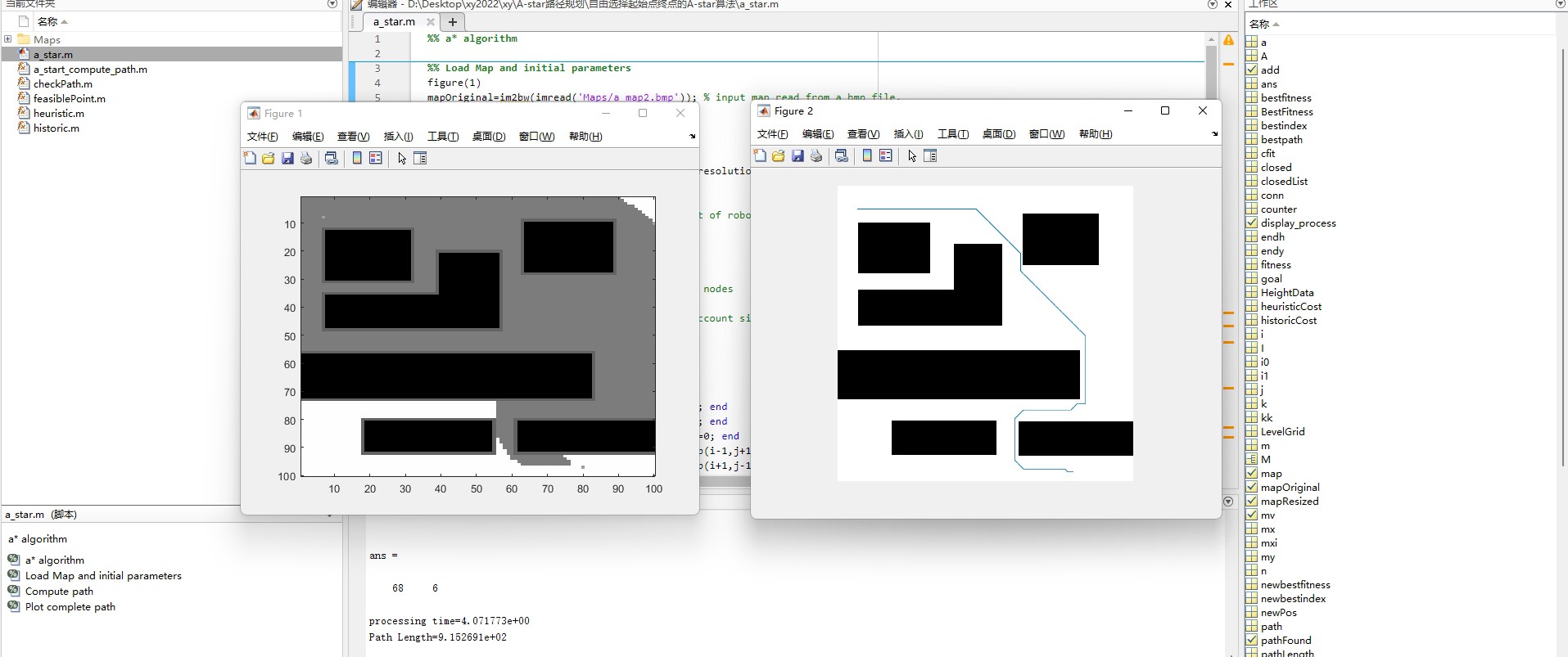

基于A算法的路径规划是一种常见且高效的路径规划算法,它在计算机科学领域被广泛应用于解决路径规划问题。在本文中,我们将介绍如何利用A算法实现鼠标自由选择起始点和终点,并通过切换五种地图展示路径规划的效果。此外,还将附上详细的代码注释,以帮助读者更好地理解代码逻辑。
首先,我们需要了解A算法的基本原理。A算法是一种启发式搜索算法,通过评估当前节点与目标节点之间的启发式距离来选择下一步的移动方向。具体而言,A算法将每个节点的代价值定义为从起始点到该节点的实际代价和该节点到目标节点的估计代价之和。在路径规划过程中,A算法会不断更新节点的代价值,并选择具有最小代价值的节点进行扩展,直至找到路径或者搜索完所有可能的节点。
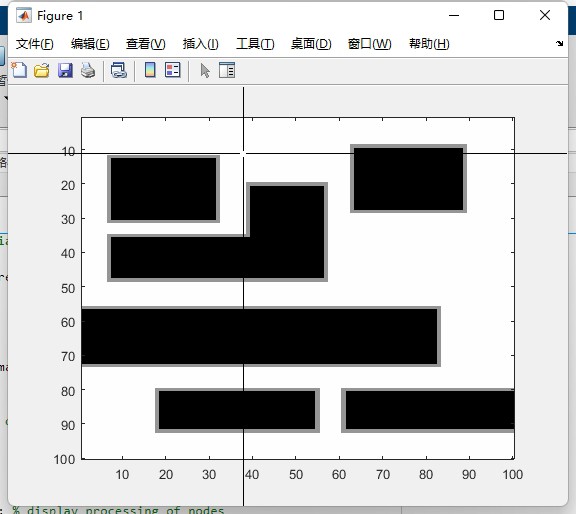
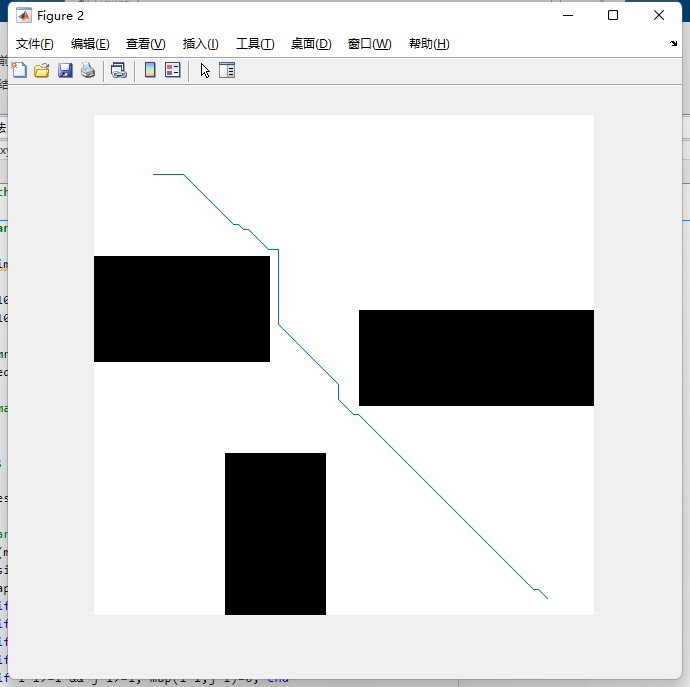
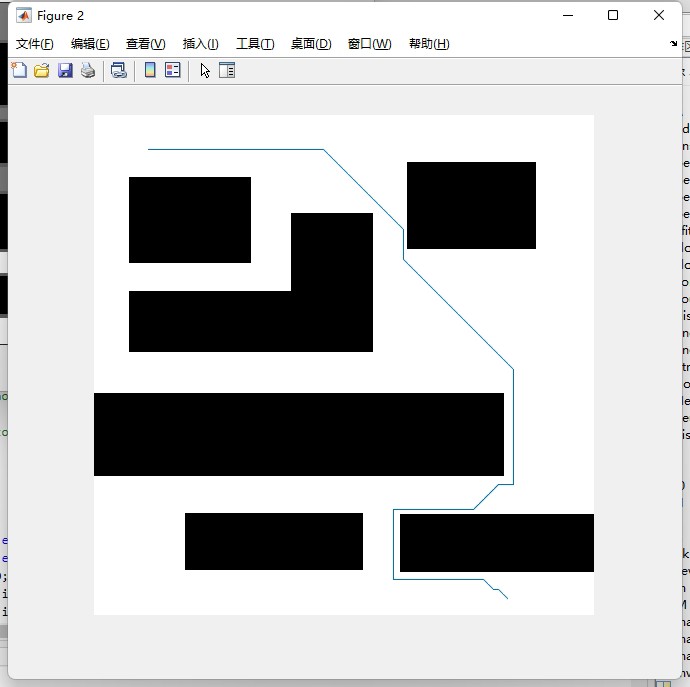
针对鼠标自由选择起始点和终点的需求,我们可以在程序中添加鼠标事件监听器。当用户点击地图上的某个位置时,程序会根据用户选择的起始点和终点进行路径规划。具体而言,程序会将起始点和终点作为A算法的输入,并调用路径规划函数来计算最优路径。在路径规划过程中,程序会根据A算法的搜索结果在地图上进行路径的标记和展示,以便用户直观地了解路径规划效果。
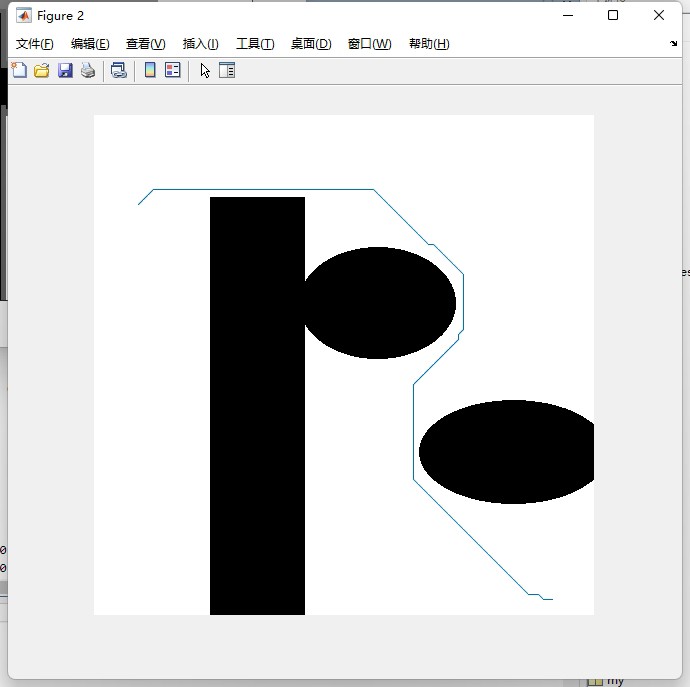
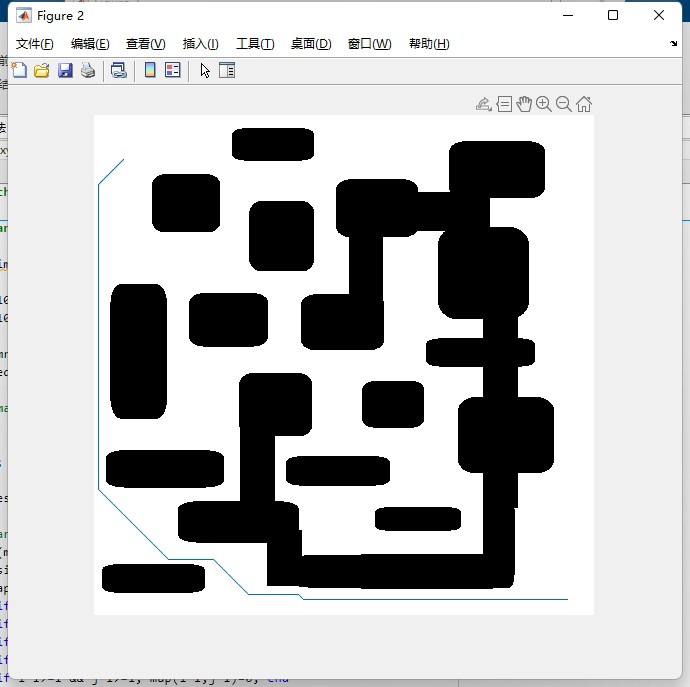
为了增加用户的交互性和体验,我们还可以提供五种不同的地图供用户选择。在程序中,我们可以通过切换不同的地图文件来展示不同的地图样式。例如,我们可以提供城市地图、森林地图、沙漠地图等,以满足用户在不同场景下的需求。同时,我们还可以根据地图特点设置不同的障碍物,测试A*算法在复杂地形下的路径规划能力。
在代码的编写过程中,我们可以通过注释来详细解释代码的逻辑和实现思路。注释的编写需要清晰、准确,并尽量避免冗余说明。通过详细的代码注释,读者可以更加轻松地理解代码的功能和运行过程,从而更好地学习和使用路径规划算法。
综上所述,我们通过基于A*算法的路径规划实现了鼠标自由选择起始点和终点,并且提供了五种地图供用户随意切换。通过详细的代码注释,我们帮助读者更好地理解代码逻辑和运行过程。该路径规划系统可以广泛应用于各种领域,如自动驾驶、物流配送等,具有较高的实用性和可扩展性。希望本文对读者在路径规划领域的学习和应用有所帮助。
【相关代码,程序地址】:http://fansik.cn/721400423432.html
















 4018
4018











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









