






相平面法,车辆动力学控制,协调控制使用,质心侧偏角-横摆角速度相平面
--------------
质心侧偏角-横摆角速度相平面程序,其中包括相平面绘制,鞍点绘制以及双线法边界绘制。
输入初始条件一键出图,带自编说明文档。
ID:7940721361326120
齐国散打娃娃
相平面法是一种在车辆动力学控制中常用的方法,用于协调控制系统的设计和优化。在这种方法中,质心侧偏角-横摆角速度相平面被用作分析和评估车辆动力学性能的工具。
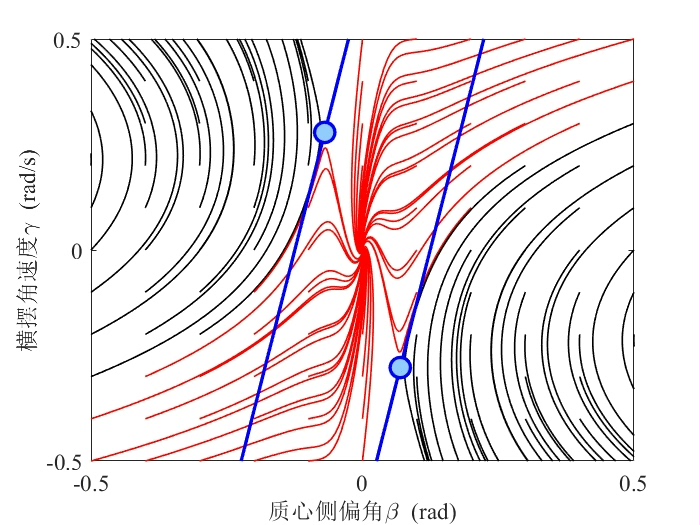
首先,相平面绘制是相平面法的基础。通过绘制质心侧偏角和横摆角速度之间的相平面图,可以直观地观察到车辆在不同工况下的运动轨迹和稳定性。相平面绘制可以通过计算和仿真得到,也可以通过实际测试数据进行绘制。通过观察相平面图,可以发现车辆在不同工况下的稳定点和不稳定点,为后续的控制系统设计提供了基础。
接下来是鞍点的绘制。鞍点是相平面法中的一个重要概念,代表车辆在某一工况下的临界状态。通过绘制鞍点,可以评估车辆在临界状态下的稳定性和控制性能。鞍点的绘制可以采用数学方法,也可以通过实际测试数据进行计算。在绘制鞍点时,需要考虑车辆的动力学方程和控制策略,以确保绘制结果的准确性和可靠性。
最后是双线法边界的绘制。双线法边界是相平面法的进一步扩展,用于确定车辆在不同工况下的边界。通过绘制双线法边界,可以评估车辆在不同工况下的极限性能和稳定性。双线法边界的绘制需要考虑车辆的力学特性和控制系统的性能要求。通过观察双线法边界,可以确定车辆在不同工况下的最优控制策略,以实现良好的操控性能和安全性能。
此外,相平面法还可以通过输入初始条件一键出图,并带有自编说明文档。这个功能使得相平面法的应用更加便捷和高效。通过输入初始条件,可以快速生成相平面图和相关参数,无需手动计算和绘图。同时,自编说明文档可以帮助用户理解和应用相平面法的方法和原理,提高工作效率和准确性。
综上所述,质心侧偏角-横摆角速度相平面程序是一种在车辆动力学控制中常用的工具,可用于分析和优化车辆的动力学性能。相平面绘制、鞍点绘制和双线法边界绘制是相平面法的关键步骤,通过这些步骤可以评估车辆的稳定性和控制性能。输入初始条件一键出图和自编说明文档则使相平面法的应用更加便捷和高效。这些功能和方法的综合运用,可以为车辆动力学控制提供有效的分析和优化工具。
【相关代码,程序地址】:http://fansik.cn/721361326120.html
















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









