







文章目录
Flow Matching是用来做什么的?
生成模型
- 生成模型本质是从先验分布采样,并通过某种变换得到目标分布。
- 例如,DDPM是从高斯分布采样,通过去噪得到目标分布。
- 生成模型核心是在已知先验分布的情况下,如何建模得到目标分布的过程。
- 例如,DDPM本质上是在目标数据分布到先验高斯分布的过程中不断加噪,并对噪声预测进行建模。
从先验分布到目标分布: Flow Matching
-
示意图
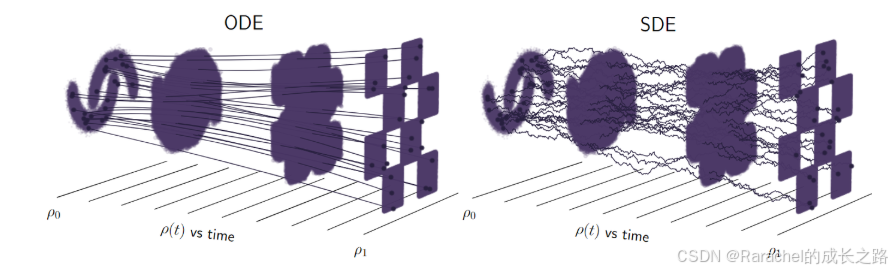
-
数学概念
- 数据点 x ∈ R d x\in \mathbb{R}^d x∈Rd, d d d代表数据的维度; x 0 ∼ p 0 x_0\sim p_0 x0∼p0表示先验分布, x 1 ∼ p 1 x_1\sim p_1 x1∼p1表示目标分布,
- 速度场 u t ( x ) = u ( t , x ) : [ 0 , 1 ] × R d → R d u_t(x)=u(t,x): [0,1]\times \mathbb{R}^d\rightarrow \mathbb{R}^d ut(x)=u(t,x):[0,1]×Rd→Rd,表示从 p 0 p_0 p0到 p 1 p_1 p1的变换,可以由以下常微分方程定义
d x = u t ( x ) d t , dx = u_t(x)dt, dx=ut(x)dt,满足 x 0 ∼ p 0 , x 1 ∼ p 1 x_0\sim p_0, x_1\sim p_1 x0∼p0,x1∼p1的边界条件, x x x是 t t t的函数。 - Flow Map ψ t ( x ) \psi_t(x) ψt(x):
- ψ t ( x s ) \psi_t(x_s) ψt(xs)可以理解为 t = 0 t=0 t=0时的一个具体的数据点 x s x_s xs在任意时间点 t t t下的位置,即 x s x_s xs在时间 t = [ 0 , 1 ] t=[0,1] t=[0,1]以内的移动轨迹。
- 若 x x x为一个分布, ψ t ( x ) \psi_t(x) ψt(x)可以理解为整个分布在时间t下的移动轨迹或者路径
- 上述常微分方程可以写作
d
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









