







一、位式控制算法
位式控制基本结构
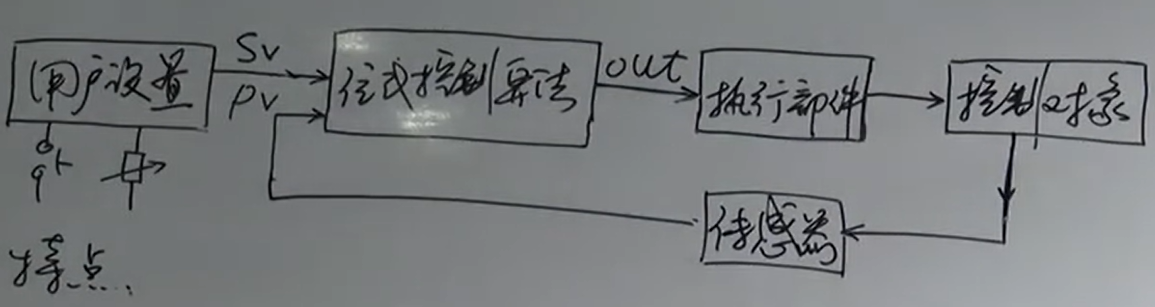
位式控制基本结构图
Sv:用户设定的值
执行部件:一般是开关型的部件(比如说MOS管、继电器、可控硅之类的开关型的器件)
控制对象:加热器、步进电机、电磁阀
Pv:控制对象当前的值
位式控制特点
位式控制算法输出信号只有两种状态高和低,对应控制对象要么工作要么不工作
位式控制算法输出信号的依据:Pv<Sv->输出高;Pv≥Sv->输出低(二位式控制)
只考察控制对象当前的状态值
控制对象本身具有一定的惯性,比如说电烙铁电拔掉了,温度还在升高;电插上了,温度还在下降。再比如说电机也是个很好的例子
二位式控制缺点:控制对象要么在1000W(假设全功率)的状态下工作,要么在0W的状态下工作,导致温度在设定值上下大幅度波动,很难稳定在设定值
二、PID控制算法
位式控制算法的最大缺点:只考察控制对象当前这个传感器回来的值和目标值之间差了多少。
PID算法的大致思想:不但考虑当前的状态值是否达标还考虑原来有没有达标过
PID控制算法基本结构图
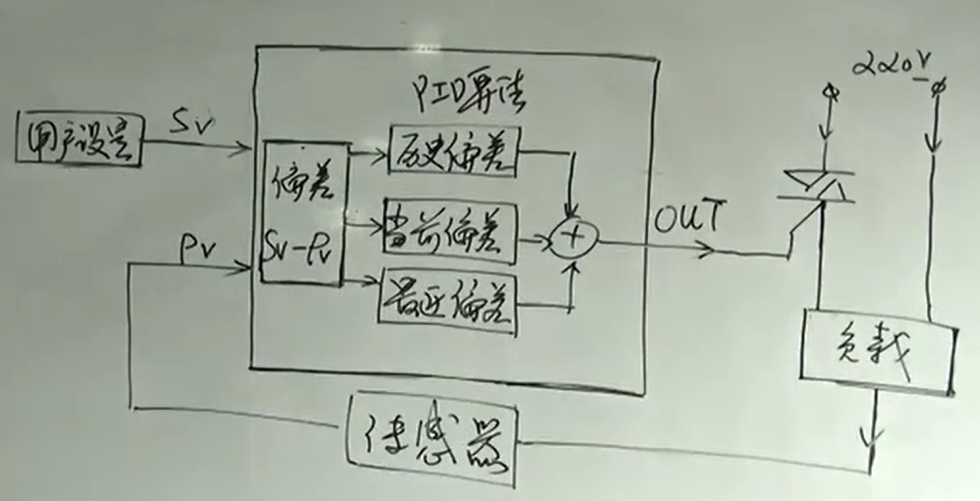
PID控制算法基本结构图
Sv:用户设定值(目标值)
Pv:控制对象当前值
偏差(E)= Sv - Pv
历史偏差:可以理解为一个存储器,从设备开始工作以来历史的一些偏差值存储起来
当前偏差:当前这个时间点的偏差值
最近偏差:距离当前这个时间点很近的两三次的值
这三个误差值进行线性叠加输出控制信号
三、PID算法分析
1.假设每隔一秒钟传感器从负载上获取一个值
x1:开机第一秒传感器从负载上获取的值
x2:开机第二秒传感器从负载上获取的值
x3:开机第三秒传感器从负载上获取的值
...
xk-1:开机第k-1秒传感器从负载上获取的值&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1222
1222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











